六旋翼农药喷洒无人机的结构设计
2015-10-21顾文杰贺勇王成波等
顾文杰 贺勇 王成波等


摘要设计了一种适合中小田块的六旋翼农药喷洒无人机。通过分析六旋翼无人机的工作原理,采用solidworks软件进行建模,确定机体中央仓、机臂折叠件和喷洒装置脚架安装结构,机臂整体实现上翘3°,以增强无人机抗风能力;喷洒装置与机体采用快装架安装,方便添加农药。所设计的六旋翼农药喷洒无人机飞行稳定,研究结果为多旋翼农药喷洒无人机的进一步优化设计提供了理论依据和技术参考。
关键词六旋翼;农药喷洒;无人机;结构设计
中图分类号S252+.3文献标识码A文章编号0517-6611(2015)31-335-03
Structural Design of Sixrotor UAV for Pesticide Spraying
GU Wenjie1, HE Yong2, WANG Chengbo1, GE Zhenyang1* et al
(1. Faculty of Modern Agricultural Engineering, Kunming University of Science and Technology, Kunming, Yunnan 650500; 2. Hubei Mechanical and Electrical Research and Design Institute Co. Ltd., Wuhan, Hubei 430000)
Abstract A sixrotor UAV for pesticide spraying was designed which is suitable for small plots. Using solidworks software for modeling by analyzing the principle of sixrotor UAV, the structure of the body central, arm folding member and sprinkler tripod was determined. The arm overall realization upturned 3°to enhance the ability of UAV wind; Spray device and the body using quick frame to install, can add the pesticide easily. The designed sixrotor UAV for pesticides spraying flying stability, the results can provide theoretical basis and technical reference for further optimal design of the multirotor UAV for pesticide spraying.
Key words Sixrotor; Pesticide spraying; UAV; Structural design
无人机施药,具有作业高度低,雾滴漂移少,旋翼产生的向下气流有助于增加雾滴对作物的穿透性,可以将药液雾滴吹到植物叶片的背面,防治效果好;远距离遥控操作使人员避免了暴露于农药的危险等诸多优点[1],非常适合中小田块的病虫害防治和大田内局部的精准施药[2]。因此,采用无人机进行农药喷洒已成为农药喷洒技术的研究热点之一[3]。虽然农业航空已在国内外有较多研究,农用飞机在农药喷洒作业中有很好的应用,但以往对农用飞机的研究主要以固定翼和直升机等有人驾驶为主,小型无人直升机,特别是多旋翼无人机在农业生产上的应用研究正受到重视[4-9]。
六旋翼无人机通过调节6个电机转速来实现升力的变化,针对六旋翼无人机原理,该文自主设计了一款六旋翼农药喷洒无人机,以期为多旋翼无人机施药提供理论和技术基础。
1六旋翼无人机飞行原理
六旋翼无人机整体布局为圆形,由6个对称布置的电机给相应的旋翼提供动力。在飞控系统的集中控制下,通过协调各个旋翼之间的不同转速和旋转方向[10-11],共同给机身提供向上的升力、控制机身的运动方向并保持机身平衡[12-13]。如图1所示为六旋翼无人机飞行原理图解。当电机1、3、5顺时针旋转的同时,电机2、4、6逆时针旋转,可以平衡旋翼对机身的反扭矩。飞行器动作依靠6个电机的转速差进行控制,其机械结构相对简单,可由电机直接驱动,无需复杂的传动装置。图1中,6个电机转速同时增大(减少)使飞机产生向上(向下)的运动;电机1和2转速减小(增大),同时电机4和5转速增大(减小),而电机3和6的转速不变,使飞机产生向前(后)方向的運动;电机1、6、5转速减小(增大),同时电机2、3、4转速增大(减小),使飞机产生向左(右)方向的运动;电机1、3、5转速减小(增大),同时电机2、4、6转速增大(减小),使飞机产生左旋(右旋)的旋转运动。
2农药喷洒无人机结构设计
六旋翼农药喷洒无人机主要由无人机机体及机载农药喷洒系统组成,其中,
六旋翼无人机主要由动力系统(包括:电池、电机、电调、桨);飞行器主体(包含:机架,起落架)和控制系统(包括:遥控器、接收机、飞行控制器)组成。
机载农药喷洒系统包括:药箱、软管、液泵、喷杆、喷头以及无线开关。
2.1机体设计
农药喷洒无人机载重较大,需要选择合适的电机、电调与桨叶。开始选择电机之前,需要计算多少推力能保持飞行器在空中稳定,基本的规律是6个电机可以产生两倍于起飞重量的推力。因为电机产生的推力除了要将无人机悬停以外,还要用一部分力来完成前进后退,左右横滚等运动状态,这样保证电机具有快速响应能力的安全边界,也能保证即使在电池电压下降的情况下飞行器不致坠落。
设计初期预估无人机大致的起飞重量,假设药箱容量为10 L,加上无人机自身及其配件的重量,初步估算整体重量约为16 kg。根据电机50%出力时,产生的升力与重力抵消,选择恒力源W6340 KV230电机作为动力,电机配合2260碳纤维桨时的参数如表1所示。电机的最大工作电流小于40 A,为了增加安全边界,采用好赢乐天50 A电调驱动,单个电机最大功率为960 W,最大拉力可达4 860 g,因此,该六旋翼无人机最大起飞重量能达到29.16 kg,为了确保安全,当电机50%出力时(留出空间以提供飞机完成除悬停外其他各种运动状态),单个电机对应电流应小于20 A,当电机输出电流为16 A时能使无人机整体悬停的质量(含机载农药喷洒装置)达到17.2 kg左右。
6个电机对称的布置在圆周上,采用22寸桨叶时,根据相邻两个桨叶不发生干涉的原则,最小轴距=(桨的长度×25.4)×2,无人机轴距至少应大于1 118 mm,但并不是軸距越大越好,因为轴距越大,机臂就越长,相应的材料也就越多,会导致整机重量变大,采用1.2倍系数扩大最小轴距,并取整数,初步设定轴距为1 300 mm。采用solidworks软件进行建模,整体结构如图2所示,并对各个零件赋予材料,机架主体采用碳纤维材料。
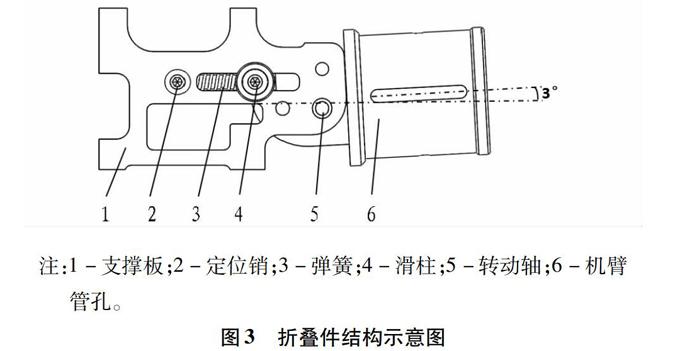
其中折叠件如图3所示,向内拉动滑柱,机臂管孔绕转动轴向下折叠,以满足无人机运输及作业的需要。飞行时将机臂展开,滑柱在弹簧的作用下往外将机臂管孔卡住,支撑板右端面与水平面成87度内倾角,与机臂管孔的端面对齐时,使得机臂管孔上翘3°,这种结构使得桨叶提供垂直向下风力的同时还具有往侧方的风力,提高无人机的抗风能力。
对所设计的机架及选择的配件进行起飞重量预估,查询所选电机每个重量为322 g,每个桨叶约50 g,每个电调约50 g,6组总重量为2 532 g;利用solidworks软件的质量属性评估机架的重量,约为1 500 g;喷洒装置脚架及药箱的重量约为2 700 g;选用22 000 mah聚合物动力锂电池重量为2 500 g,飞控及其导线的重量为100 g。将所选设备的重量作为负载加入飞机整体重量,不装农药时无人机整体质量已经达到了9 332 g,药箱再加上10 kg农药,整体重量约为19 kg,超过了预先设计的重量,对比所选的电机,如果使飞机能满载起飞,电机输出电流应该在16~24 A之间,在电机的合理输出范围之内,因此所选电机满足其载重要求。如果所选电机不满足载重要求,需再重新进行电机选型的计算,这是一个循环往复的过程,直到最终选择的电机满足要求。
对所设计的无人机的飞行时间进行理论计算,确保设计的合理性。
飞行时间的计算公式:
t=u×c1 000n×p×60(1)
式中:t-飞行时间,min;
u-电池电压,v;
c-电池容量,mAh;
n-电机个数,个;
p-当前负载下的电机消耗的功率,W。
水箱容量为10 L,为使整体质量接近设计要求,当挂载8 kg农药时,六旋翼无人机及其喷洒装置重量约为9 kg,整机重量约为17 kg,在飞行时要想使六旋翼无人机能在空中悬停,6个电机的出力应该与重力相抵消,单个电机出力应为2 833 g,此时对应单个电机消耗的功率是384 W,选用22 000 mAh锂电池,最低电压为22.2 V,旋翼个数为6,代入公式(1)算得此六旋翼无人机的续航时间为12.72 min,这是理想的状态,因为在飞行的过程中,随着农药的减少,整机质量将会慢慢减轻,电机消耗的功率会相应减少,所以续航时间12分钟在安全范围之内。
2.2中央仓
中央仓是无人机结构的中心部分,主要由上下两层碳纤维板构成,如图4所示。中间镂空部分便于安装飞控及与导线的布置,外围对称的布置六个机臂折叠件,并用沉头螺钉连接。为了增加强度,其余受力部分采用铝柱连接。电池安装板与中央仓采用手拧螺母进行连接,并安装在整个无人机的最上方,便于安装更换电池。
其中快装架为六旋翼无人机与喷洒脚架的连接部件,其主要材料为碳纤维板制作。其安装过程是,将快装架安装在起落架上,并通过快装架4个部位的弹簧定位销与中央仓底部的承重板连接,将拉环拉出就能将喷洒脚架与无人机分离,方便添加农药。
2.3起落架
起落架是飞行器着地时,整个机体重量的承受部件,必须具有良好的支撑和减震功能,以保护飞行器降落时震动对部件的损坏。药箱布置在起落架中心,并尽量使得整体的重心处于无人机6个旋翼的中心部位。起落架由空心铝管制成,如图5所示。在满足支撑强度的要求前提下,减轻整体重量,另外在底部铝管外面套上减震海绵,可以有效减少无人机下降过程中带来的震动。
2.4喷洒系统
机载农药喷洒系统包括:药箱、软管、液泵、喷杆、喷头以及无线开关。其中药箱挂载在起落架上,液泵固定在药箱上,药箱出口通过软管和液泵进口连接,液泵的出口与喷杆进液口连接,喷杆上设有液力式雾化喷头。液泵与电源连接,并采用无线开关控制其工作通断,实现了远程控制其喷洒,避免农药对操作人员的伤害。
该机载农药喷洒系统的原理是:当进行农药喷洒时,操作人员将无人机飞行到指定作业区域上空,打开无线遥控开关,液泵通电运转,将药箱中的药液通过软管输送到喷杆,最后由喷头喷出。无线遥控开关控制继电器的通断,能及时地控制液泵的工作状态,从而能实现对受灾作物的喷洒,对其他作物的少喷或不喷,合理有效地提高了农药的利用率。
3验证
根据六旋翼无人机的工作原理,利用solidworks软件进行六旋翼农药喷洒无人机的设计,为了检验设计是否合理,制作样机并于2015年7月14日在湖北省武汉市江夏区合力村某玉米地进行田间喷洒试验,玉米生长处于花粒期,株高2 m,如图6所示。试验时,温度28 ℃,空气平均相对湿度65%,风速小于1 m/s。
4结论
试验表明所设计的六旋翼无人机飞行稳定,远距离遥控作业降低了施药人员的中毒风险,喷药喷洒装置与无人机安装方便,提高了农药喷洒效率,为多旋翼无人机的进一步研究奠定了基础。
参考文献
[1] 王立军,姜明海,孙文峰,等.飞机喷雾技术的探讨[J].农机化研究,2005(5):64-65.
[2] HUANG Y,HOFFMANN W C,LAN Y,et al.Development of a spray system for an unmanned aerial vehicle platform[J].Applied engineering in agriculture,2009,25(6):803-809.
[3] 羅锡文.对加快发展我国农业航空技术的思考[J].农业技术与装备,2014(5):7-15.
[4] KIRK I W.Measurement and prediction of atomization parameters from fixed-wing aircraft spray nozzles[J].Transactions of the ASABE,2007,50(3):693-703.
[5] 茹煜,贾志成,范庆妮.无人直升机远程控制喷雾系统[J].农业机械学报,2012,43(6):47-52.
[6] 周宏平,茹煜,舒朝然,等.航空静电喷雾装置的改进及效果试验[J].农业工程学报,2012,28(12):7-12.
[7] RICHARDSON B,THISTLE H W.Measured and predicted aerial spray interception by a young Pinus radiata canopy[J].TransactionsAmerican society of agricultural engineers,2006,49(1):15.
[8] 薛新宇,兰玉彬.美国农业航空技术现状和发展趋势分析[J].农业机械学报,2013,44(5):194-201
[9] TSAI M Y,ELGETHUN K,RAMAPRASAD J,et al.The Washington aerial spray drift study:Modeling pesticide spray drift deposition from an aerial application[J].Atmospheric environment,2005,39(33):6194-6203.
[10] MADANI T,BENALLEGUE A.Control of a quadrotor mini-helicopter via full state backstepping technique[C]//Decision and Control,2006 45th IEEE Conference on.IEEE,2006:1515-1520.
[11] MADANI T,BENALLEGUE A.Backstepping sliding mode control applied to a miniature quadrotor flying robot[C]//IEEE Industrial Electronics,IECON 2006-32nd Annual Conference on.IEEE,2006:700-705.
[12] 刘羽峰,宁媛.六轴旋翼碟形飞行器控制系统设计[J].现代机械,2010(4):56-58.
[13] 杨成顺,杨忠,张强.一种新型多旋翼飞行器的建模与反演控制[J].济南大学学报(自然科学版),2013,27(1):52-58.
.
