永磁同步电机趋近率滑模控制
2015-10-21焦山旺施火泉汤一林
焦山旺, 施火泉, 汤一林
(江南大学轻工过程先进控制教育部重点实验室,江苏无锡214122)
永磁同步电机趋近率滑模控制
焦山旺, 施火泉*, 汤一林
(江南大学轻工过程先进控制教育部重点实验室,江苏无锡214122)
在永磁同步电机的矢量控制调速系统中,以永磁同步电机的数学模型为基础,采用变速趋近率滑模控制和一般趋近率滑模控制分别设计了转速调节器和电流调节器,通过李雅普诺夫稳定性理论证明了系统的稳定性。滑模控制器采用趋近率控制可以改善控制系统的动态品质。最后在Matlab/Simulink环境下搭建仿真模型并进行仿真验证。结果表明,文中设计的滑模控制系统转速响应快,杭干扰能力强。
永磁同步电机;矢量控制;变速趋近率;一般趋近率
永磁同步电动机(PermanentMagnet Synchronous Motor,PMSM)是常用的一种伺服电机[1]。目前PMSM调速系统中,在控制精度要求不高的情况下,普遍采用PID控制。由于PMSM是一个非线性、强耦合的系统,在实际应用中还存在参数变化、负载扰动等不确定性。因此,需要研究先进的控制方法来提高调速系统的控制性能。近年来,包括自适应控制、滑模控制等现代控制理论已被运用到PMSM调速系统中。滑模控制具有结构简单、对参数变化和负载扰动有较强的鲁棒性等优点[2-4]。但目前广泛使用的趋近率控制,存在严重的抖振问题。为此,文献[5]针对滑模控制系统的抖振问题,提出一种带负载转矩观测器的电流滑模控制方法,很好地改善了系统电流跟踪响应特性。文献[6]引入终端吸引子概念,并在终端吸引子中引入状态变量,使滑模趋近速度与状态变量有关,很好地抑制了抖振。文献[7]采用改进型变指数趋近率方法,一定程度上减少了系统的抖振,但其变速部分是不连续的。
在文献[7]的基础上,文中提出一种新型的变速趋近率控制用于速度环的控制。该趋近率控制运行轨迹在远离滑模面时,趋近速度较大,而运行轨迹在滑模面附近时,趋近速度又变小。该新型趋近率控制可以很好地抑制抖振和提高系统的鲁棒性。电流环采用一般趋近率控制,以有效减少电流波动,加快电流响应。
1 PMSM数学模型
PMSM在d,q坐标系下的数学模型[5]。
定子电压方程:
电磁转矩方程:

运动平衡方程:

其中:id,iq为定子电流在直轴和交轴上的分量;Ud, Uq为定子电压在直轴和交轴上的分量;ω为电机转子电角速度;θ为电机转子位置;Rs为定子电枢电阻;Ld,Lq为电感在直轴和交轴上的分量;p为电机极对数;ψf为永磁转子的磁链;J,B为电机转动惯量和摩擦系数;TL为负载转矩。
2 PMSM速度控制器设计
定义速度误差为

其中,ω*为给定转子电角速度;ω为实际转子电角速度。由式(3)可得

选择积分滑模面:

其中,c为积分滑模系数,c>0。选择积分滑模面可以平滑转矩,减小稳态误差,具有抑制抖振的作用。变速趋近率为

其中,β,q>0,0<α<1,e1是速度误差。˙s1=-qs1是指数趋近项,可以快速地到达滑模面:


在趋近滑模面上时,趋近速度趋近零,采用饱和函数可以使速度的变化是连续的,可以很好地抑制抖振。
由式(5),(6),(7)可得控制量:

选取Lyapunov函数为V=s2/2,因为

所以,改进型变速指数趋近律满足滑动模态存在性和到达条件,以及Lyapunov稳定性。
3 PMSM电流控制器设计
3.1 直轴电流控制器设计

选取积分滑模面:

其中c1>0。采用积分滑模面设计能够消除系统状态变量的稳态误差,提高控制精确度。
采用一般趋近率控制,如下式:

其中,k1>0,q1>0,采用饱和函数可以有效地降低滑模控制带来的抖振。
由式(8),(9),(10)可得控制量ud为

3.2 交轴电流控制器设计

选取积分滑模面:

其中c2>0。采用积分滑模面设计能够消除系统状态变量的稳态误差,提高控制精确度,同时使得控制律中不存在状态变量的二阶导数,增强了控制器的稳定性[8-9]。
采用一般趋近率控制,如下式:

其中,k2>0,q2>0。
由式(11),(12),(13)可得控制量uq为


选取Lyapunov函数V1=2+,则

所以,电流环的一般指数趋近律满足滑动模态存在性和到达条件,以及Lyapunov稳定性。
4 仿 真
为了验证速度环、电流环滑模控制器的控制效果,采用id=0和SVPWM调制相结合的矢量控制, PMSM调速系统的系统如图1所示。

图1 PM SM调速系统Fig.1 Diagram of the speed regulating system of PM SM
PMSM主要仿真参数如下:定子电阻Rs= 0.56Ω,直轴电感Ld=2.1 mH,交轴电感Lq= 2.1 mH,转子磁通ψf=0.175 Wb,转动惯量J= 3.6×10-4kg·m2,电机极对数p=4,阻尼系数B= 9.44×10-5N·m·s。
在新型趋近率滑模控制,和一般一趋近率控制两种控制策略的情况下,在阶跃给定转速为300 rad/s带3 N·m负载启动时和突加4 N·m负载扰动时的速度响应如图2,3所示,电流响应如图4,5所示。
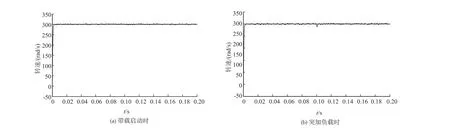
图2 变速趋近率滑模控制转速响应Fig.2 Speed response w ith the sliding m ode control based on the variab le rate reaching law

图3 一般趋近率控制转速响应Fig.3 Speed response w ith sliding m ode control based on reaching law

图4 滑模控制电流响应Fig.4 Current response w ith the slidingmode control

图5 PID控制电流响应Fig.5 Current response w ith PID
由仿真结果可知:(1)在阶跃给定转速启动时:由图2(a)和图3(a)可知,采用滑模双环控制时,经过2.5 ms达到给定速度;而采用一般趋近率滑模控制时,需经过3 ms达到给定速度,而且,转速波动明显。在0.1 s突加4 N·m的负载时:由图2(b)和图3(b)可知,采用滑模双环控制时,转速突降到290 rad/s,转速波动较小;采用一般趋近率滑模控制时,转速突降到285 rad/s,且转速波动明显,即采用滑模双环控制时,系统响应快,抗干扰能力较强。
(2)由图4(a)和图5(a)可知,电流环采用滑模控制时,启动时的冲击电流为14 A,启动后电流的振荡幅度较小;采用PID控制时,启动时的冲击电流为16 A,启动后电流振幅明显增大。由图4(b)和图5(b)可知,在突加负载时,采用滑模控制时的电流波动明显比采用PID控制时的小。
5 结 语
针对PMSM调速系统,采用变速趋近率和一般趋近率分别设计了速度调节器和电流调节器,并进行了系统稳定性分析。仿真结果表明,与一般趋近率控制相比,采用变速趋近率控制的滑模控制可使电机速度快速准确地跟踪给定信号,有效地抑制了控制量的抖振,并且对负载扰动具有较强的鲁棒性。
[1]李珍国.交流电机控制基础[M].北京:化学工业出版社,2009.
[2]李政,胡广大,崔家瑞,等.永磁同步电机调速系统的积分型滑模变结构控制[J].中国电机工程学报,2014,43(3): 431-437.
LIZheng,HU Guangda,CUIJiarui,etal.Sliding-mode variable structure controlwith integral action for permanentmagnet synchronousmotor[J].Proceedings of the CSEE,2014,43(3):431-437.(in Chinese)
[3]Elmas C,Ustun O.A hybrid controller for the speed control of a permanent magnet synchronous motor drive[J].Control Engineering Practice,2008,16(3):260-270.
[4]刘治钢,王军政,赵江波.永磁同步电机神经网络自适应滑模控制器设计[J].电机与控制学报,2009,13(2):290-295.
LIU Zhigang,WANG Junzheng,ZHAO Jiangbo.Neural network adaptive slidingmode control for permanentmagnet synchronous motor[J].Electric Machines and Control,2009,13(2):290-295.(in Chinese)
[5]金宁治,王旭东,李文娟.混合动力汽车永磁同步电机的电流滑模控制与负载扰动补偿[J].汽车工程,2013,35(6): 553-558.
JIN Ningzhi,WANG Xudong,LIWenjuan.Current slidingmode control and load disturbance compensation of PMSM for hybrid electric vehicles[J].Automotive Engineering,2013,35(6):553-558.(in Chinese)
[6]张晓光,赵克,孙力,等.永磁同步电动机滑模变结构调速系统新型趋近率控制[J].中国电机工程学报,2011,31(24): 77-82.
ZHANG Xiaoguang,ZHAO Ke,SUN Li,et al.A PMSM sliding mode control system based on a novel reaching law[J]. Proceedings of the CSEE,2011,31(24):77-82.(in Chinese)
[7]童克文,张兴,张星,等.基于新型趋近律的永磁同步电动机滑模变结构控制[J].中国电机工程学报,2008,28(21): 102-106.
DONG Kewen,ZHANG Xing,ZHANG Yu,et al.Sliding mode variable structure control of permanent magnet synchronous machine based on a novel reaching law[J].Proceedings of the CSEE,2008,28(21):102-106.(in Chinese)
[8]方一鸣,牛犇,张永潮,等.永磁同步电机转速快速动态滑模控制[J].电机与控制应用,2012,39(4):43-47,50.
FANG Yiming,NIU Ben,ZHANG Yongchao,etal.Fast dynamic slidingmode control for speed of permanentmagnet synchronous motor[J].Electric Machines and Control Application,2012,39(4):43-47,50.(in Chinese)
[9]朱磊,温旭辉,赵峰,等.永磁同步电机弱磁失控机制及其应对策略研究[J].中国电机工程学报,2011,31(18):67-72.
ZHU Lei,WEN Xuhui,ZHAO Feng,et al.Control policies to prevent PMSMs from losing control under field-weakening operation [J].Proceedings of the CSEE,2011,31(18):67-72.(in Chinese)
(责任编辑:杨 勇)
Exponential Reaching Law Sliding-M ode Control for Perm anent M agnet Synchronous M otors
JIAO Shanwang, SHIHuoquan*TANG Yilin
(Key Laboratory of Advanced Process Control for Light Industry,Ministry of Education,Jiangnan University,Wuxi 214122,China)
Based on the vector control technique,a speed current controller is designed by improving the exponential reaching law controlmethod and traditional exponential approach law method for permanentmagnet synchronousmotor speed control systems.The stability of the system is proved with the Lyapunov stability theory.The dynamic performance of the control system can be improved by using the sliding mode reaching rate control.Based on the mathematical model of the permanent magnet synchronous motor,the simulation model is designed with Matlab/Simulink software.The simulation results indicate that,the speed ofmotors could rapidly track the given speed with small fluctuation and small current harmonics,the control system has strong anti-interference ability.
permanentmagnet synchronousmotor,vector control,variable rate reaching law,reaching law
Email:shq@jiangnan.edu.cn
TM 351;TP 29
A
1671-7147(2015)03-0316-05
2014-11-18;
2014-12-22。
焦山旺(1988—),男,河南濮阳人,电气工程专业硕士研究生。
*通信作者:施火泉(1962—),男,江苏苏州人,高级工程师,硕士生导师。主要从事电力电子与电力传动研究。