矩阵变换器输入侧电流的反步法控制*
2015-10-21潘月斗郭凯陈继义徐杰
潘月斗 郭凯 陈继义 徐杰
(1.北京科技大学 自动化学院 钢铁流程先进控制教育部重点实验室,北京100083;2.福建星网锐捷网络有限公司,福建 福州350600;3.马鞍山钢铁股份有限公司 自动化工程公司,安徽 马鞍山243000)
反步法亦称后退法、反演法. 反步法的基本思想是将复杂的非线性系统分解成不超过系统阶数的子系统[1-2],然后为每个子系统设计部分Lyapunov函数和中间虚拟控制量,通常从一个高阶系统的内核开始,即从期望系统的某种性能出发,比如稳定性等,然后一直“后退”到整个系统,最终将它们集成起来完成整个控制律的设计. 由于反步法在非线性控制系统中的强鲁棒性以及参数自适应性而在机器人控制、电机控制、国防等控制领域有着很深的理论基础[3-5].
矩阵变换器[6-9](MC)是一种直接变换型的交流-交流电力变换装置,其拓扑结构由排成3 行3列的9个开关器件组成,因类似于矩阵而得名.传统的交直交型电力变换器为了减小直流脉动电压,中间设有大电容,这就使得其应用场合受限制.矩阵变换器没有中间储能环节,因此具有结构紧凑、体积小的优点,极大地拓展了其应用领域.正是由于它省去了储能电容及电感,其输入侧的电流容易受到电网电压畸变、三相负载不对称等非正常工况的影响[10],因此,研究一种新的控制算法以改善矩阵变换器的控制性能就显得尤为必要.
针对矩阵变换器输入侧电流易受电网和负载不对称而受干扰的问题,国内外学者主要从控制算法上进行研究.文献[11]中采用零矢量补偿的电流控制策略对矩阵变换器输入电流进行控制,输入输出侧电流的正弦度没法保证,输入输出侧均没有滤波,易造成高频干扰.文献[12]中运用了一种新的开关规律推导法,然后将正弦环宽滞环控制法和输入电流空间矢量合成法引入矩阵变换器以改善输入输出电流品质,此方法有效性虽高,但是采用了变换器独特的27 矢量电流控制算法,控制规律复杂,还要求准确检测矢量分区,容易造成控制器的误动作.文献[13]中提出一种新型的矩阵变换器电流控制策略,减少了输入电流的谐波,但结果表明输入电流波形失真,波峰处误差较大.
针对上述控制算法的特点以及不足之处,文中依据反步法的原理,结合李亚普诺夫函数[14],运用反步控制的鲁棒性[15],对矩阵变换器设计控制算法.克服了PI 调节器只适合线性系统的缺点,同时其控制律的设计是逐级递进的,从而确保了了控制的稳定性,相比于其他的控制方法,具有良好的控制性能,从而改善了文献[11]中的抗扰性能,使得MC输入侧电流正弦度得到了保证.此外,文中算法改善了文献[12]控制精度不高、易出现控制失误的问题,通过在线控制,提高了响应速度. 最终得到的控制器有效地减少了文献[13]中输入侧电流波形失真、波峰处误差较大的问题.
1 矩阵变换器输入侧数学模型
矩阵变换器的物理模型[16]如图1 所示,文中矩阵变换器为图1 中的输入侧模型,其符号定义如表1 所示.

图1 矩阵变换器物理模型Fig.1 Physical model of matrix converter
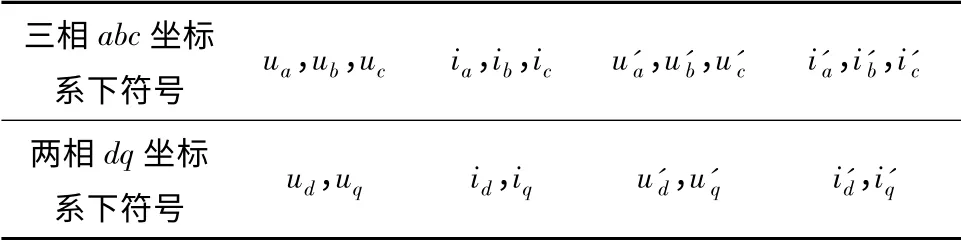
表1 电压电流在abc 坐标系和dq 坐标系中的符号Table 1 Symbols of voltage and current on abc and dq coordinate systems
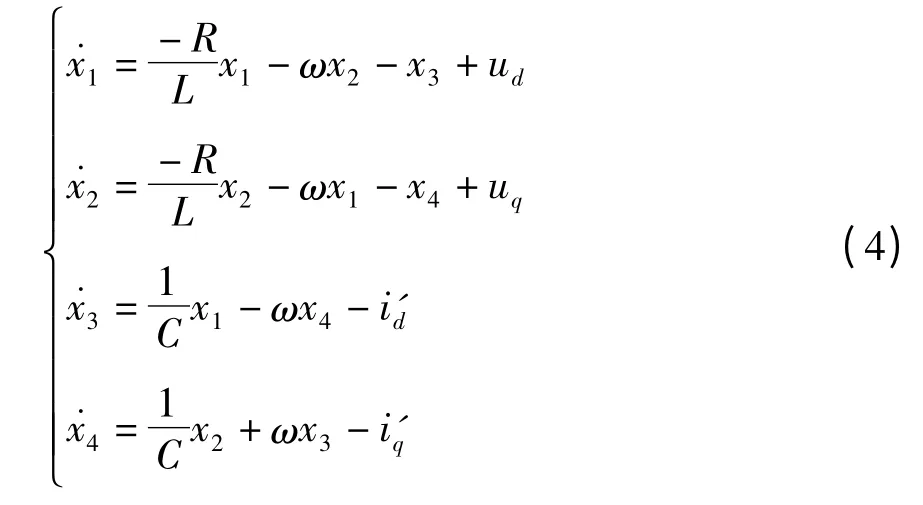
根据基尔霍夫定律,可以列出矩阵变换器输入侧的方程如下:

式中,x=a,b,c,R 为输入侧电阻,L 为输入侧电感,C 为滤波电容.
由于式(1)中有abc 三相,因此可以采用派克变换(PARK)对式(1)进行降维处理. PARK 变换公式[17]如式(2)所示:
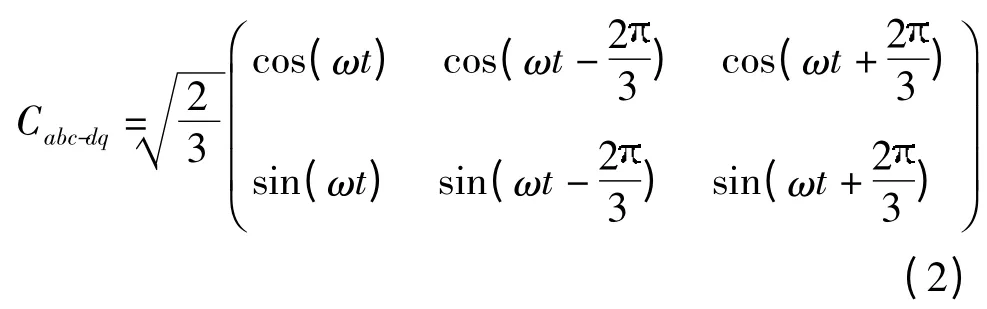
式(2)中abc-dq 代表从三相坐标系abc 到两相旋转坐标系dq 变换,根据式(2)对式(1)进行PARK变换,可以将三相坐标系abc 下的方程转换成在两相坐标dq 下的方程,如式(3)所示:
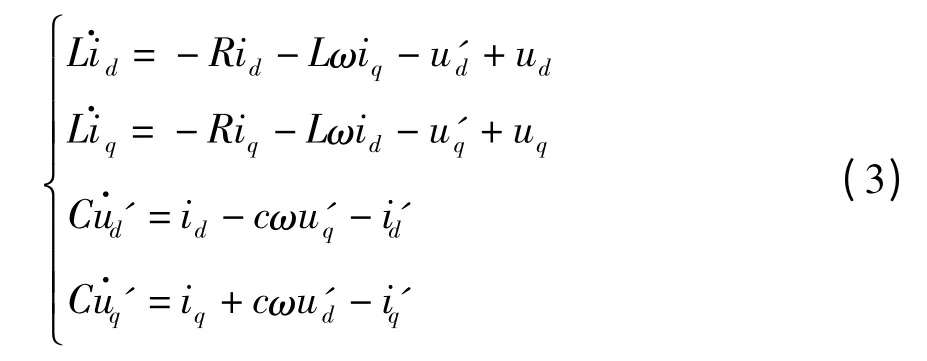
式(3)中,Xd、Xq(X =u,u′,i,i′)代表表1 所示的dq坐标系下相应的电气参量,ω 为期望的角频率.
2 反步法设计控制器
为了便于设计控制律,把系统分解成两个子系统,然后分别对子系统设计李亚普诺夫函数,得到相应的控制律,最终把两个子系统的控制律集成得到系统的实际控制量. 子系统的分解原则为含有系统真正控制输入的微分方程应在最后予以设计. 为了便于推导和运算,令x1=id,x2=iq,x3=u′id,x4=u′iq,式(3)化为式(4)所示形式:
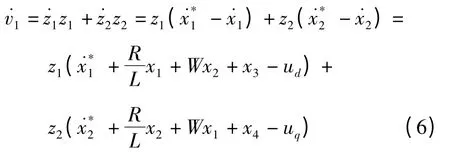
式(4)中,x1和x2为图1 中三相输入电流经坐标dq变换后的值,为文中的控制对象.首先考虑式(4)的前两个方程,即由x1和x2构成的子系统,定义x1和x2的跟踪误差分别为z1和z2,即


中含有变量x3和x4,把它看成虚拟控制输入,x3和x4的选取应当使得v1子系统的李雅普诺夫函数v1=满足<0.对v1求导可得

式(7)中参数k1和k2可调,前提是保证其大于零,即控制系统稳定.式(7)的意义在于,如果x3和x4的稳态值按照某种状态分别趋于α3和α4,那么矩阵变换器输入侧电流将跟随到设定值.由于x3和x4在实际中很难收敛到α3和α4,因此下一步需要设计控制律对x3、x4进行控制.为此定义x3和x4的误差变量如式(8)所示:

其中,α3和α4为式(6)中x3和x4的期望值. 考虑(x1,x2,z3,z4)所构成的子系统,将式(8)中的x3和x4代入到式(6)中,结合式(7),得到

为(z1,z2,z3,z4)所构成的子系统构造正定函数v2如下:

对式(10)求导得
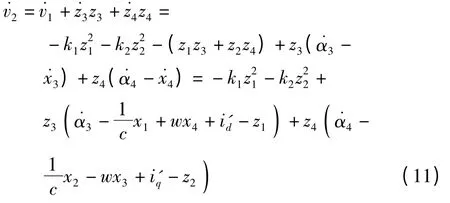

z3、z4由式(7)、(8)得到,因此,式(12)只含有x1、x2、x3、x4、z1和z2.在保证参数k1、k2、k3、k4大于0的前提下,通过调整4个参数,当系统存在偏差时,控制量和相应变化,使系统达到设定 值. 上述ki,i=1,2,3,4 值的选取越大,系统响应的速度越快,但是过大则会使得系统发散.采用此法设计控制器时,难点在于控制参数的选取,考虑到id、iq的对称性,因此在参数选取时可以用同一个参数,给调试带来了很大的方便.
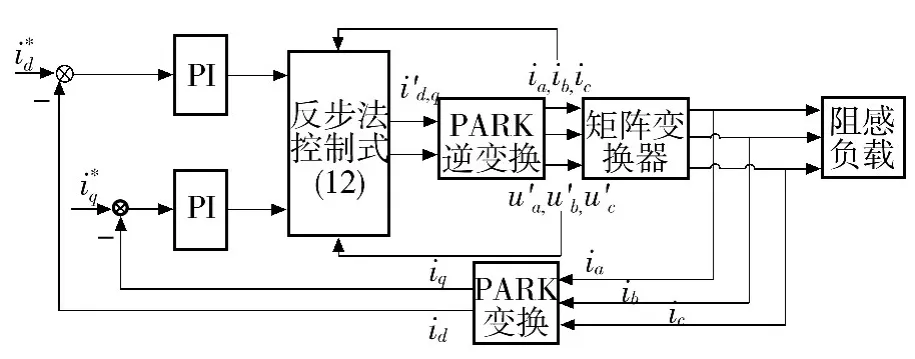
图2 算法流程图Fig.2 Flow chart of algorithm
需要说明的是,图2 是一个复合控制结构,为了验证PI 控制器的控制效果,便于进行对比实验,当只采用PI 控制时,将反步法控制式(12)置为1. 同理,在研究反步法控制效果时,把PI 环节传递函数置为1 即可.
3 Matlab 仿真
用Matlab 自带的Simulink 模块搭建矩阵变换器的仿真模型,其中MC 控制器是最核心的部分.模型如图3 所示.

图3 Simulink 模型示意图Fig.3 Schematic model of simulink
文中仿真系统参数为输入侧采用RLC 滤波,滤波器参数分别为:R =30 Ω,L =10 mH,C =10 μF.矩阵变换器输出端带阻感负载,电阻R1=30 Ω,电感L1=10 mH. 反步法控制器参数为:k1= k2=1 000;k3=k4=7.8 ×105.
3.1 三相输入失衡
将输入电压幅值A、B、C 三相在t 从0.05 s 至0.10 s 时由220 V 降至200 V,如图4 所示,负载阻感参数不变.
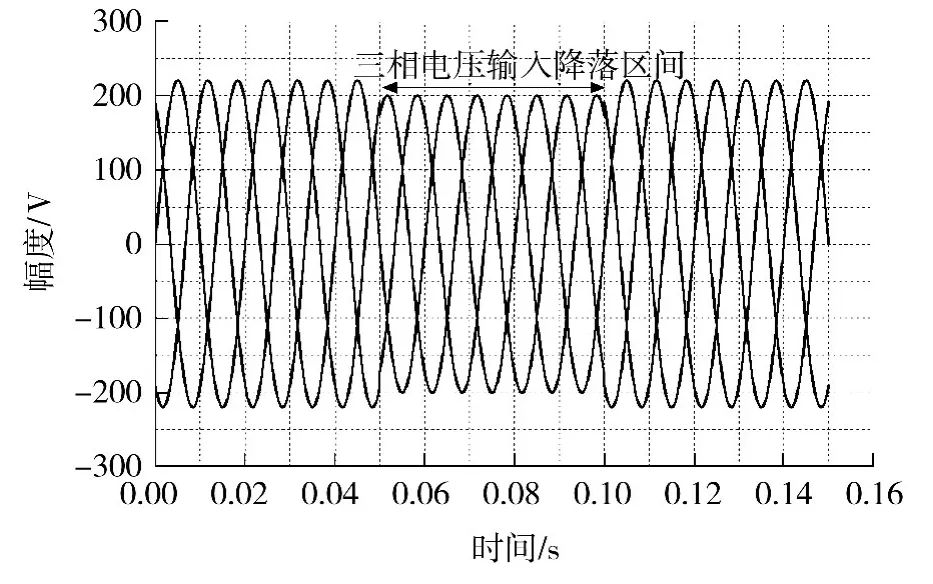
图4 矩阵变换器三相输入电源Fig.4 Input three-phase source of MC
常规PI 控制的系统仿真结果如图5(a)所示,图5(b)为PI 控制下A 相电流的FFT(Fast Fourier Transformation)波形,图中THD 为总谐波畸变系数,且THD 值越小波形质量越好.反步法控制的系统仿真结果如图6(a)所示,图6(b)为反步法控制下A相电流的FFT 波形.
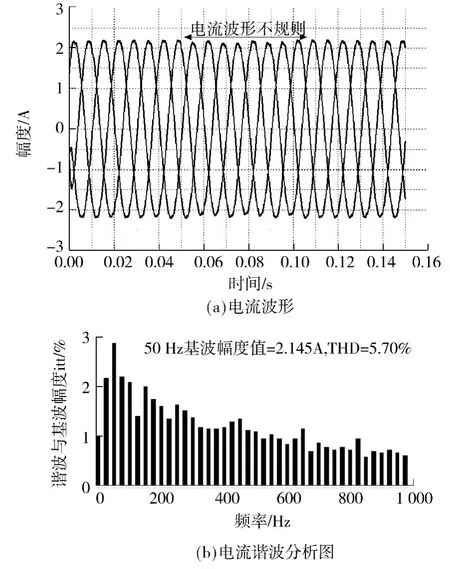
图5 输入降落时PI 控制的MC 输入侧电流波形和电流谐波分析图Fig.5 Input current waveform and spectrogram of MC using PI controller under asymmetric source

图6 输入降落时反步法控制的MC 输入侧电流波形和电流谐波分析图Fig.6 Input current waveform and spectrogram of MC using back-stepping under asymmetric source
对比图5(a)、5(b)和图6(a)、6(b)可以发现,在t 从0.05s 至0.10s 的电压瞬时降落区间内,采用PI 控制器的矩阵变换器输入侧电流波形不对称,其电流的总谐波畸变系数[18](THD)为5.70%. 采用反步法控制的矩阵变换器输入侧电流波形没有出现任何变化,其频谱分析图也表明输入电流的总谐波畸变系数为1.01%,远低于PI 控制所带来的污染.综合对比可知反步法控制的矩阵变换器输入侧电流在电网电压瞬时降落的情况下能保持稳定不变,并且反步法设计的控制器是一种“绿色”的控制器.
3.2 负载不对称
设定A、B、C 三相为对称输入,幅值为220 V,相位互差120°,负载电阻A 相变为35 Ω(变化率16.7%),B、C 两相维持不变. 其他参数不做任何更改.常规PI 控制的矩阵变换器输入侧电流波形如图7(a)所示,图7(b)为相应的电流FFT 波形.负载变化情况采用反步法控制的MC 输入侧电流波形如图8(a)所示,图8(b)为相应的电流FFT 波形.

图7 负载不对称时PI 控制的MC 输入侧电流波形和电流谐波分析图Fig.7 Input current waveform and spectrogram of MC using PI controller under asymmetric load
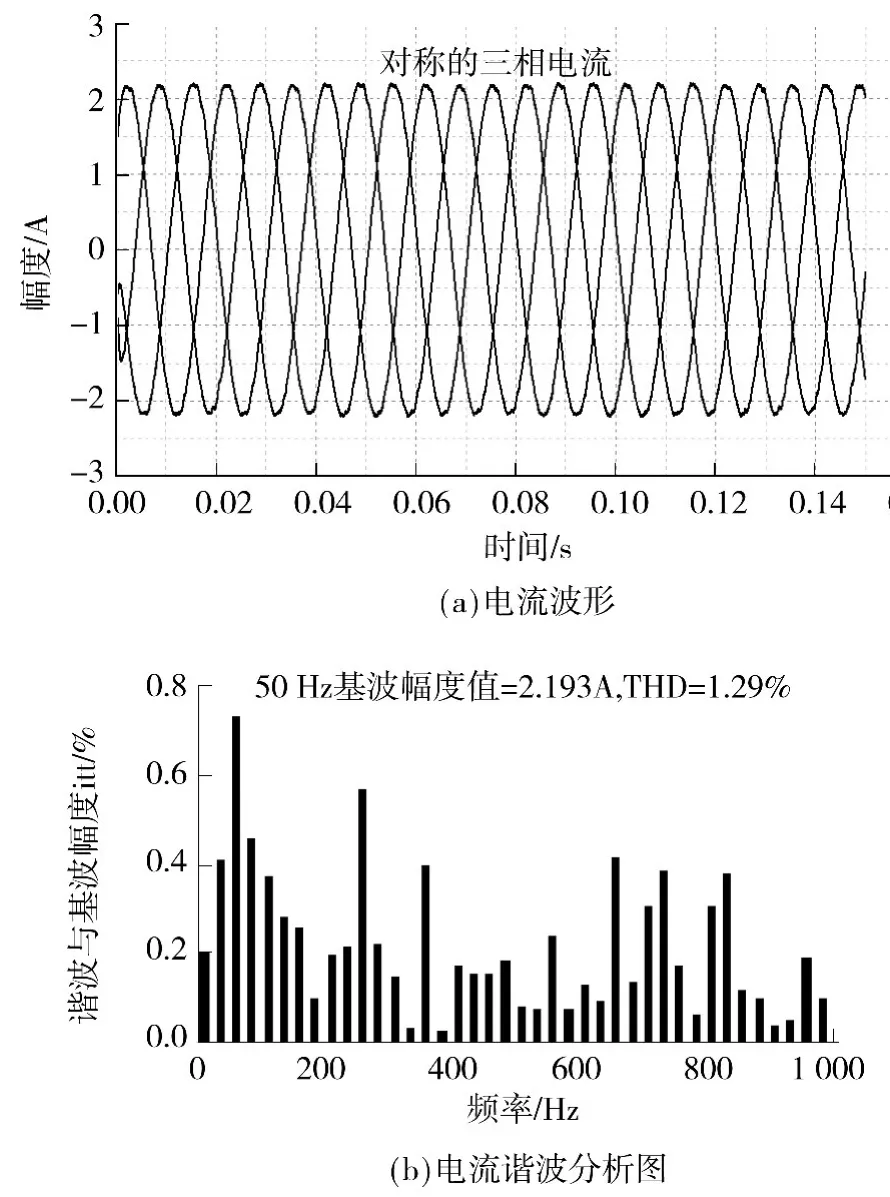
图8 负载不对称时反步法控制的MC 输入侧电流波形和电流谐波分析图Fig.8 Input current waveform and spectrogram of MC using back-stepping under asymmetric load
对比图7(a)、7(b)和图8(a)、8(b)不难发现,在t 从0 s 至0.15 s 的仿真时间内,PI 控制的矩阵变换器输入侧电流波形明显出现三相不对称,电流总谐波畸变系数为2.90%.用反步法控制的矩阵变换器输入侧电流波形无失真,总谐波畸变系数为1.29%.综合分析图7(a)、7(b)以及图8(a)、8(b)可知,反步法控制的矩阵变换器在负载电阻不对称的情况下,输入侧电流能够很好地抵抗扰动,反步法控制方法优于传统PI 控制方法.
4 矩阵变换器硬件实验
4.1 电路模块
文中硬件电路采用TI 公司的dsp2812 作为主芯片,开关矩阵采用反向串联的两个IGBT 以及二极管组成,开关组成如图9 所示.
图中TLP250 为光耦,通过PWM 进行控制,当控制引脚为高时,光耦输出端使得绝缘栅双极型晶体管(IGBT)导通,三相电源流过. 整个开关板和主控电路如图10 所示.
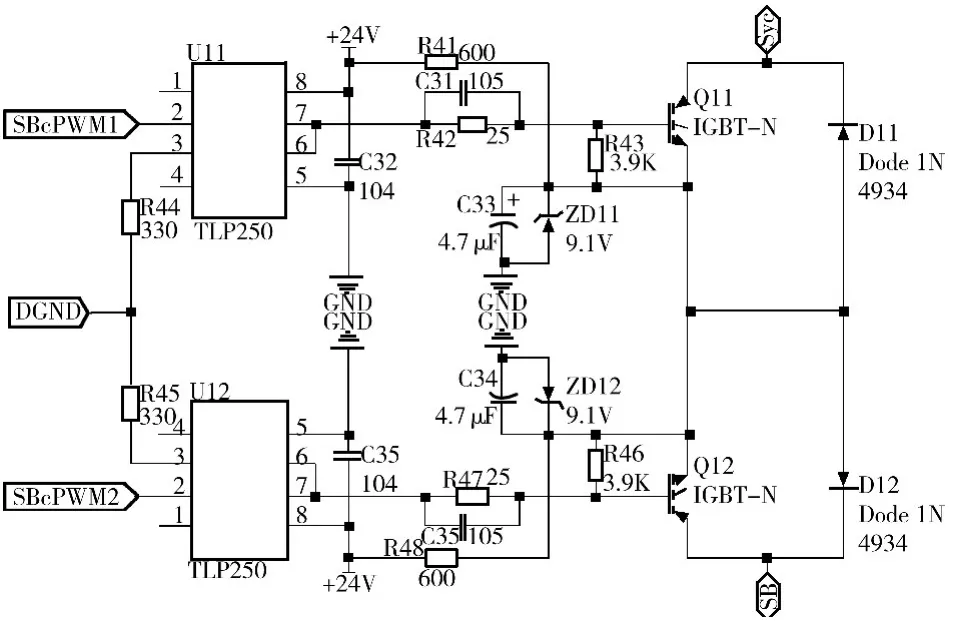
图9 开关模块图Fig.9 Schematic diagram of switch module
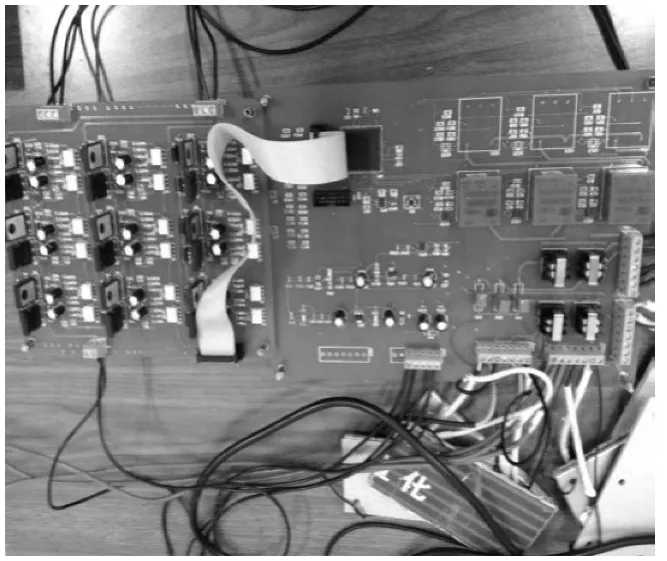
图10 开关电路、主控电路图Fig.10 Switching circuit and master circuit
4.2 硬件实验结果
在CCS3.3 软件开发平台上,将反步法控制算法用C 语言进行编程实现.矩阵变换器所带负载以及滤波参数均和仿真参数一致. 测量采用Tektronix电流传感探头,测量档位选择35 mV/A.首先将三相输入电源由220 V 变为200 V,其余参数不变,得到矩阵变换器输入侧电流波形如图11 所示.
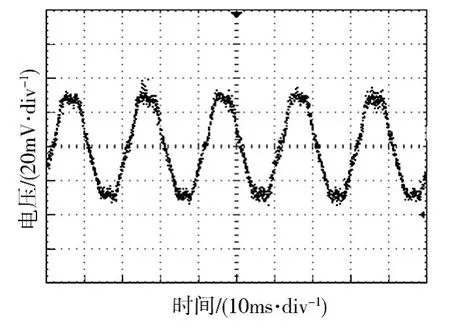
图11 电源不对称情况下MC 的输入侧电流波形Fig.11 Current waveform of MC on unbalanced sources
由图11 可知,图中正弦峰值为75 mV,因此依据比例可知电路电流为2.14 A,和仿真结果一致.在整个波形周期中,电流幅值以及波形都维持不变,表明硬件系统在电网降落输入情况下其输入侧电流实现了跟踪.将三相输入电源恢复至220 V,此时改变A 相负载电阻,变化范围跟仿真一致,得到结果如图12 所示.
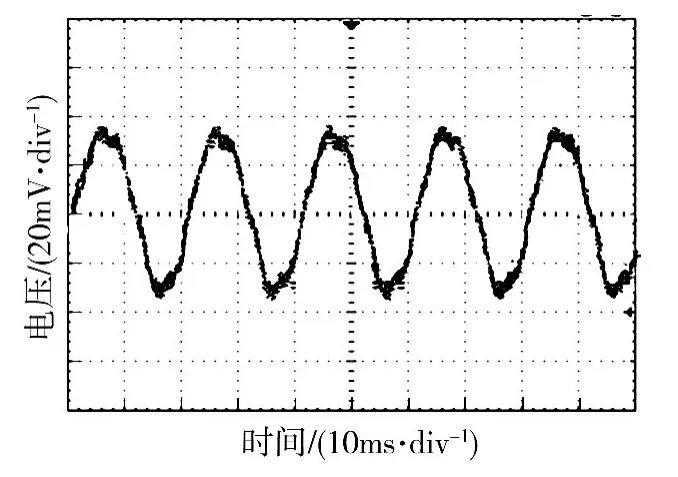
图12 负载不对称情况下MC 的输入侧电流波形Fig.12 Current waveform of MC on unbalanced loads
从图12 可以看出,在系统负载变化时,矩阵变换器输入侧电流波形正弦度很好,波形没有出现较大失真,幅度未发生改变,因此很好地实现了对输入电流的跟随.
5 结论
首次运用反步法原理设计MC 控制器,通过Matlab 仿真,进行了理论验证,在此基础上设计硬件电路进行带阻感负载的实验,验证了反步法在MC控制上的有效性.实验结果表明:
1)反步法设计的矩阵变换器在电网电压不平衡的情况下能够实现对输入电流的跟随,能有效地减少输入侧电流波形的畸变.
2)反步法设计的矩阵变换器在负载不对称的情况下能够实现对输入电流的跟随,能有效地减少输入侧电流波形的畸变.
3)用反步法设计的矩阵变换器在非正常工况下能够保证输入电流的正弦度,减少高频谐波污染,改善控制性能.
[1]Morawiec M.The adaptive backstepping control of permanent magnet synchronous motor supplied by current source inverter[J]. IEEE Transactions on Industrial Informatics,2013,9(2):1047-1055.
[2]Zhou J,Wen C,Yang G.Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal [J]. IEEE Transactions on Automatic Control,2014,59(2):460-464.
[3]Hou Z G,Zou A M,Cheng L,et al.Adaptive control of an electrically driven nonholonomic mobile robot via backstepping and fuzzy approach [J]. IEEE Transactions on Control Systems Technology,2009,17(4):803-815.
[4]Xian B,Guo J,Zhang Y. Adaptive backstepping tracking control of a 6-DOF unmanned helicopter[J].IEEE/CAA Journal of Automatica Sinica,2015,2(1):19-24.
[5]付培华,陈振,丛炳龙,等. 基于反步自适应滑模控制的永磁同步电机位置伺服系统[J]. 电工技术学报,2013(9):288-293,301.Fu Pei-hua,Chen Zhen,Cong Bing-long,et al. A position servo system of permanent magnet synchronous motor based on back-stepping adaptive sliding mode control[J].Transactions of China Electrotechnical Society,2013(9):288-293,301.
[6]吴捷,石章海,杨俊华,等. 采用直接转矩控制的矩阵式变换器的仿真[J]. 华南理工大学学报:自然科学版,2006,04:47-50,55.Wu Jie,Shi Zhang-hai,Yang Jun-hua,et al.Smiulation of direct torque control for PMSM based on fuzzy algorithm[J]. Journal of South China University of Technolo-gy:Natural Science Edition,2006,34(4):47-50,55.
[7]孙尧,粟梅,王辉,等.双级矩阵变换器的非线性分析及其补偿策略[J]. 中国电机工程学报,2010,(12):20-27.Sun Yao,Su Mei,Wang Hui,et al. Nonlinearity analysis and compensation strategies for two-stage matrix converter[J].Proceedings of the CSEE,2010,12:20-27.
[8]Lee M Y,Wheeler P,Klumpner C. Space-vector modulated multilevel matrix converter[J].IEEE Transactions on Industrial Electronics,2010,57(10):3385-3394.
[9]Hojabri H,Mokhtari H,Chang L.A generalized technique of modeling,analysis,and control of a matrix converter using SVD[J].IEEE Transactions on Industrial Electronics,2011,58(3):949-959.
[10]She H,Lin H,Wang X,et al. Nonlinear compensation method for output performance improvement of matrix converter[J]. IEEE Transactions on Industrial Electronics,2011,58(9):3988-3999.
[11]何必,张晓锋,林桦,等.采用零矢量补偿的矩阵变换器电流控制策略[J]. 中国电机工程学报,2007,(13):53-57.He Bi,Zhang Xiao-feng,Lin Ye,et al. Current control strategies for matrix converter using zero vectors [J].Proceedings of the CSEE,2007,13:53-57.
[12]张志学,马皓.矩阵变换器的电流控制策略[J].中国电机工程学报,2004(8):64-69.Zhang Zhi-xue,Ma Hao. Current control strategies for matrix converter [J]. Proceedings of the CSEE,2004(8):64-69.
[13]马星河,赵军营,汪旭东,等.矩阵变换器电流控制策略[J].电力自动化设备,2009(2):56-59.Ma Xing-he,Zhao Jun-ying,Wang Xu-dong,et al. Current control strategies for matrix converter[J]. Electric Power Automation Equipment,2009(2):56-59.
[14]Mazenc F,Ito H. Lyapunov technique and backstepping for nonlinear neutral systems[J].IEEE Transactions on Automatic Control,2013,58(2):512-517.
[15]Lin F J,Shieh P H,Chou P H. Robust adaptive backstepping motion control of linear ultrasonic motors using fuzzy neural network[J]. IEEE Transactions on Fuzzy Systems,2008,16(3):676-692.
[16]何红颜. 矩阵变换器空间矢量PWM 策略的研究[J].计算机与数字工程,2011(6):29-31,149.He Hong-yan. Research on space vector PWM strategy of matrix converter[J]. Computer & Digital Engineering,2011(6):29-31,149.
[17]Pigazo A,Moreno V M,Estebanez E J.A recursive park transformation to improve the performance of synchronous reference frame controllers in shunt active power filters[J]. IEEE Transactions on Power Electronics,2009,24(9):2065-2075.
[18]Su Y P,Ni C L,Chen C Y,et al. Boundary conduction mode controlled power factor corrector with line voltage recovery and total harmonic distortion improvement techniques[J]. IEEE Transactions on Industrial Electronics,2014,61(7):3220-3231.