ROV七功能机械手水动力学分析
2015-10-20尹汉军等
尹汉军等


【摘 要】在ROV作业的过程中机械手起到非常重要的作用,所有的作业都需要机械手完成,为了保证机械手的作业能力,建立了以D-H法为基础的ROV七功能机械手数学模型,通过运用Kane法对ROV七功能机械手进行了动力学分析,推导出具有外载荷的动力学方程,并通过运用Morison方程对ROV七功能机械手的水动力学进行了研究,并应用计算流体力学软件Fluent仿真计算了拖拽力系数。与Matlab机器人工具箱计算的结果进行了对比,从而验证了动力学模型的准确性,最后对ROV七功能机械手进行水动力学解算。
【关键词】七功能机械手 水动力学 运动学 FOTRAN
【Abstract】Manipulator plays an essential and important role in ROV's operation, and almost covers the entire subsea exploration procedure. A numerical model of 7-functional manipulator is built based on D-H formula, and using Kane method analysis its dynamics to derive kinetic equation with external loads. Morison equation was also used on this manipulator's hydrodynamics, and drag coefficients were calculated by using Fluent software. The results were compared to calculations results using Matlab toolbox robots, and the comparison verified the accuracy of the dynamic model. The hydrodynamic forces of the seven function ROV manipulator were solved at last.
【Key words】Seven Function Manipulator, Hydrodynamic, Kinematics, FORTRAN
近些年来随着海洋资源的开发和海洋科学研究的日益深入,水下机器人-机械手系统是水下作业的一个重要组成部分,除了用于水下的观测勘察作业外,水下机器人-机械手还被用于完成采集样本;水下设施的建造和维护;铺设水下管道和维修等相对繁琐的一些工作。然而由于水下环境复杂多变,ROV在航行和作业中必然会遇到各种各样的情况,特别是在作业时要保证作业的准确性和作业时ROV不受损坏,它的动力学问题的研究将会使水下机器人-机械手系统的作业能力提高,为人类开发海洋资源提供更多的支持,因此这个领域的研究是非常重要的。
目前对水下机械手水动力学模型的研究采用的是理论和实验的相结合的方法。McLain[1,2]等运用力矩传感器测量、原理计算分析以及流动显示这些方法综合应用,对只有一个关节水下机器人机械手系统进行了水动力学的研究。Leabourne[3]以MacLain等人的成果为基础,讨论了有两个自由度的机械手的水动力学建模问题。Tarn[4]等建立了配备有机械手的潜水器的动力学模型,并应用 Kane 法求解。该模型将外力其中包括水动力施加到了模型中。Shen[5]等使用了浸入边界法数值求解纳维-斯托克斯方程,计算在水中物体移动时所受的水动力。在国内主要有华中科技大学的肖治琥,徐国华[6]在流干扰下的水下机械手动力学模型分析,运用Lagrange方程和Morison公式对水下机械手的动力学的理论分析。王华[7]等应用切片理论的方法,研究了水下机械手的手指动力学特性,并应用Matlab软件的Simulink模块建立了仿真模型,研究了无水流影响的水下环境中的机械手手指的动力学特性。
1 动力学模型建立
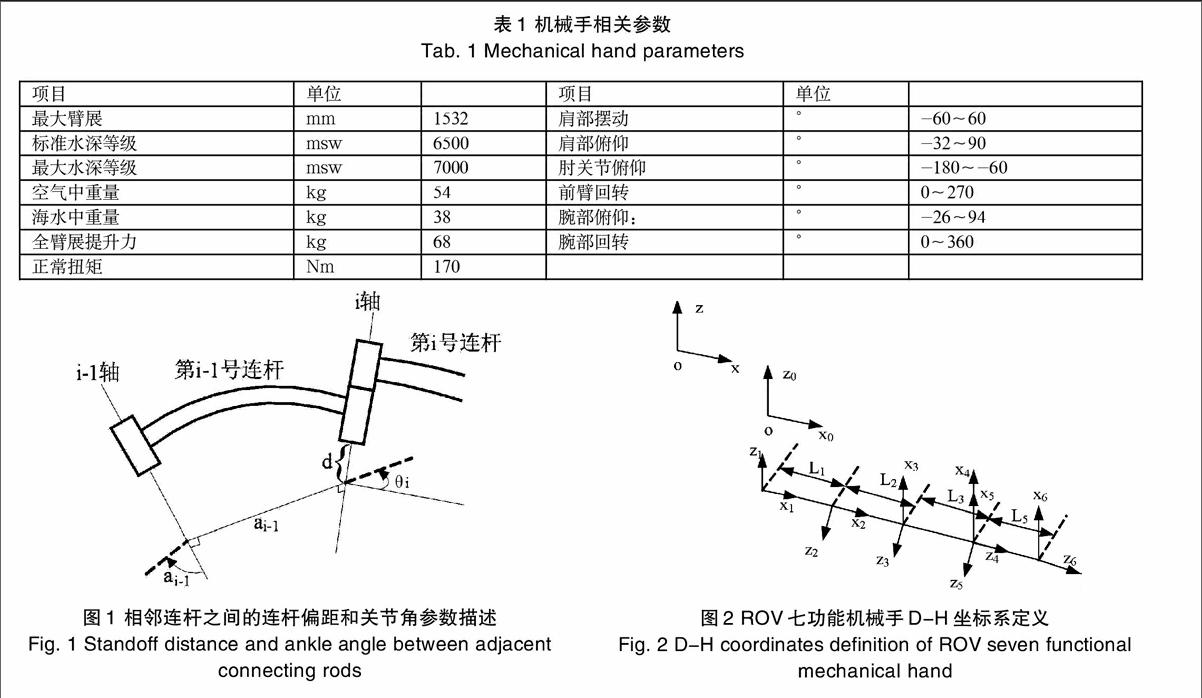
1.1机械手参数
本文以美国Schilling公司的Orion7型七功能机械手为研究对象,该机械手结构由多关节串联组成为6自由度串联,机械手相关参数如表1所示[8]。
。
本文的连杆所在的坐标系位置都是在各个坐标系的坐标轴上。当连杆在坐标系的X轴正方向时,,此时的,,。同理当连杆在坐标系的Y轴正方向时,,此时的,,。当连杆在坐标系的Z轴正方向时,,此时的,,。
3.2Morison方程拖拽力系数计算
Morison方程中Cd、Cm均为实验值,此系数依赖于雷诺数,物体表面粗糙度,KC数等。不过在设计中一般考虑危险性最大或者受力最大的情况。因此选择受力最大时候的Cd数值作为本文的计算系数本文采用Fluent流体力学分析软件计算该值[14]。
由于深水水温较低,所以深水水的粘度值比常温下的粘度值要大,因此选择Pa·s=0.0015,流速选择0.2m/s,如图4示是主要的区域尺寸,长方形最左侧竖直边为水流的入口出,中间的截面是ROV七功能机械手大臂的截面形状。在研究Cd数时本文选择了横截面的最大物体的几何限度处作为来流的垂直受力面。这样可以得到最大的Cd值,计算得知左右。
图4 区域尺寸示意图
Fig. 4 Schematic diagram of regional dimension
4七功能机械手动力学解算
4.1动力学模型校核
为了验证动力学模型的准确性,在不考虑水流的影响下,本文通过利用Matlab机器人工具箱与自编的Fortran程序结算的力矩曲线图进行对比,本文选择角度从初始位置移动到一下角度,,,,,。如图5所示。
图5 各关节驱动力矩变化曲线对比
Fig. 5 Comparisons of ankle drive torque curves
如图5所示,用Matlab机器人工具箱与自编的Fortran程序结算的力矩曲线图进行了对比,在数值和曲线趋势上基本一致,从而验证了模型的准确性,图中关节1的驱动力矩较小这是因为关节1的布置和其他关节不同,只有它一个关节为左右摆动关节,所以它在没有水流影响下不克服重力,所以数值较小;关节2、关节3和关节5需要克服机械手的自身重力所以力矩值较大;关节4和关节6主要作用是改变机械手姿势用的是液压马达,所以力矩值较小,特别是关节6基本趋近于0。
4.2 水流影响下动力学研究
假定环境水流为定常流流速为0.1m/s,方向沿惯性坐标系X轴正方向。所得驱动力矩曲线如图6所示。
图6 各关节驱动力矩变化曲线(考虑海流)
Fig. 6 Comparisons of ankle drive torque curves (incorporates current)
从图6中可以看出关节1和关节6的驱动力矩与无海流的驱动力矩相比较变化不大,这是因为水流的来流方向沿着X轴的正方向,产生的力矩主要是在Y轴的方向,所以关节1的驱动力矩影响较小,力矩基本不变;关节6的驱动力矩因为是沿着机械手末端手抓的轴向,所以只有手抓自身的旋转会对其产生影响,水流的产生的附加力矩只会对坐标系6的X轴和Y轴产生力矩;关节2、关节3和关节5的驱动力矩变化较大,这是因为考虑了水流和自身运动的影响;关节4的驱动力矩变化也很大,这是因为关节4的转动改变了手抓的空间位置,使其和之前的各个关节不出在一个平面内这样关节4收到的力矩变大是因为手抓受到水流的冲击在关节4的转动方向上产生了附加力矩。
4结语
本文采用了理论分析和计算机仿真的方法,针对美国Schilling 公司的Orion7型号机械手,建立了深水ROV作业机械手的理论模型,计算结果表明机械手在深水中水流的影响下关节2、关节3和关节5的驱动力矩变化较大,在设计和施工作业中人们应当给予特殊考虑。
参考文献:
[1]McLain T W, Rock S M. Development and experimental validation of an underwater manipulator hydrodynamic model [J]. The International Journal of Robotics Research,1998,17(7):748-759.
[2]McLain T W, Rock S M. Experiments in the hydrodynamic modeling of an underwater manipulator[C]. Autonomous Underwater Vehicle Technology, 1996. AUV'96. Proceedings of the 1996 Symposium on. IEEE, 1996:463-469.
[3]Leabourne K N.Two-link hydrodynamic model development and motion planning for underwater manipulation [M].2001.
[4]Tarn T J, Shoults G A, Yang S P. A dynamic model of an underwater vehicle with a robotic manipulator using Kanes method [M]. Underwater Robots. Springer US,1996:195-209.
[5]Shen L, Chan E S, Lin P. Calculation of hydrodynamic forces acting on a submerged moving object using immersed boundary method[J]. Computers & Fluids,2009,38(3):691-702.
[6]肖治琥,徐国华.流干扰下的水下机械手动力学建模分析[J].中国机械工程,2011, 22(21):2521-2526.
[7]王华,孟庆鑫,王立权.基于切片理论的水下灵巧手手指动力学分析[J].机器人,2007,29(2):160-166.
[8]SMD. Kseretec Quasar ROV & Control System [M].2009.
[9]John J. Craig著.机器人学导论[M].北京:机械工业出版社,2006:49-53.
[10]谷鸣宇.六自由度机械手运动学、动力学分析及计算机仿真[D].吉林大学硕士论文. 2004:9-11.
[11]苏曙. Kane方法及其特点[J].机械设计,1993,(4):66-68.
[12]张玲,王爱群.关于小直径垂直桩柱结构的波浪力研究[J].海洋湖沼通报,2004, 3:90-98.
[13]连琏,顾云冠.水下物体在波浪力作用下的运动计算[J].海洋工程,1995,13(1):20-27.
[14]曹晞雍,谢莉.风沙流中沙粒拖曳力系数研究[J].中国沙漠,2011,31(3):593-596.
作者简介:
尹汉军(1973—),男,汉族,山东青岛人,硕士研究生,高级工程师,1997年本科毕业于大连理工大学,2005年研究生毕业于天津大学,现就职于海洋石油工程股份有限公司,主要从事海洋工程结构设计与项目管理。
宋磊(1981— ),男,汉族,山东济南人,博士研究生,讲师,2013年毕业于哈尔滨工程大学船舶工程学院,现于哈尔滨工程大学船舶工程学院,主要研究方向:船舶与海洋工程仿真。
钟朝廷(1981—),男,汉族,四川省内江市人,研究生,工程师,2007年毕业于哈尔滨工业大学机电工程学院,现就职于海洋石油工程股份有限公司,主要从事:海洋石油工程铺管系统与水下生产系统设计。
姜瑛(1973—),女,汉族,天津人,硕士研究生,高级工程师,1996年本科毕业于河北工业大学,2010年研究生毕业于长江大学,现就职于海洋石油工程股份有限公司,主要从事海洋石油工程水下生产系统设计与项目管理。
项目基金:国家科技重大专项:海洋深水工程重大装备及配套工程技术,项目编号:2011ZX05027-005
