CBTC列车控制系统定位技术
2015-10-18周留运
周留运
(天津轨道交通集团有限公司 天津 300384)
随着无线通信技术的发展,轨道交通列车控制系统正从传统的固定闭塞方式向移动闭塞方式转变。目前,基于无线通信的列车控制系统(Communication-based Train Control,CBTC)已成为轨道交通行业主流的列车控制技术并被广泛使用。CBTC在列车控制精度上有了质的提升,并具有较高的安全性和可靠性。本文以天津地铁3号线列车控制系统为例,对移动闭塞列车控制系统定位技术进行了介绍。
1 CBTC列车控制系统的构成
基于无线通信的移动闭塞列车控制系统包括列车自动监控子系统(ATS)、列车自动防护子系统(ATP)、列车自动运行子系统(ATO)、联锁子系统、数据传输子系统(DTS)和车-地通信子系统(TWC)等。通过以上子系统实现列车进路控制、列车安全防护和列车运行自动控制等功能。
2 用于列车定位的主要设备
2.1 信标和信标读取器
信标和信标读取器属于查询应答装置,是利用无线感应原理实现车-地通信的一种数据传输装置。信标安装于两根走行轨之间(见图1),信标内存储了线路地理位置信息和其他线路参数。信标读取器安装在列车的下方,列车通过信标上方时,向每个信标传送 2.4,GHz的无线电载波频率,并接收信标返回的调制信息。
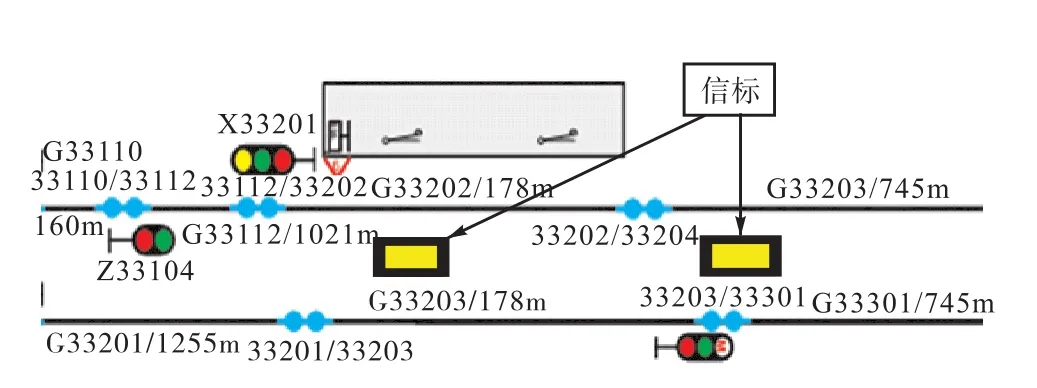
图1 信标设置示意图Fig.1 Schematic diagram of beacon setting
信标读取器通过沿线信标可以获取列车的精确位置信息,该位置对应于车辆物理地图上的1个点。信标读取器对每个来自信标数据的准确性进行验证,然后通过通信接口将数据传送到车载ATP通道中,车载ATP处理器对该数据进行处理,确定列车的准确位置。
2.2 测速电机
测速电机是一个脉冲转速传感器,通过测量车轮转速测定列车运行速度和距离。每个测速电机上均有两个通道,可以发出两组脉冲流,脉冲相位呈 90,°。每套车载列车自动控制系统设备均备有两个测速电机,分别安装在单独的非动力车轴上。
2.3 多普勒雷达
多普勒雷达安装于车底(见图 2),应用了多普勒原理,通过测量发送频率和接收的反射频率之间的差异来计算列车速度和距离值。雷达的测算结果完全不受列车空转和滑行的影响。多普勒雷达有2个天线,可以为速度测量提供冗余的信号通道。多普勒雷达输出的是一种脉冲流,其频率与已测量的列车速度成比。多普勒雷达用于准确读取5,km/h以上的速度。

图2 多普勒雷达位置示意图Fig.2 Schematic diagram of the position of a Doppler radar
3 列车定位
3.1 定位原理
列车位置和方向的确定是通过车载 ATP实现的。车载ATP通过安装在列车上的测速电机、多普勒雷达、信标读取器等传感器计算列车运行方向、速度和走行距离,以此来确定列车位置。测速电机和多普勒雷达共同实现车速的精确检测,克服列车打滑和空转的影响。信标读取器接收沿轨道分布的信标中所含的地理位置信息,提供列车位置精确校正功能并辅助补偿列车轮径误差。
车载列车控制系统设置有线路数据库,用于表示系统物理地图,列车每遇到1个信标,ATP就会根据该信标验证位置坐标是否在当前计算的列车地理位置的位置误差范围之内,然后更新车辆位置并重新设定位置误差。如果信标坐标在当前计算的位置之外、信标的坐标编程不正确或者轨道线路的数据库中不存在该坐标,ATP将实施紧急制动。
3.2 定位过程
列车定位信息处理过程(见图3)具体包括3个步骤:①系统通过处理测速电机和多普勒雷达的输出信息,生成行驶距离(位移)、速度和方向的精确数据。线路曲线半径过小可能会导致测速电机产生一个较小的位移误差。为解决这一问题,ATP在列车运行的整个距离上确定累计误差范围。②为了防止定位误差累计过大,沿线路设置的每个信标都有 1个唯一的编号并带有特定的位置信息。系统通过信标读取器识别信标,从而校正自身的位置。当遇到信标时,在更新车载位置和重新设置位置误差之前,ATP会检查信标的位置坐标是否在当前计算的车载位置误差范围之内。此外,当列车经过信标标记时,ATP将自动校准轮径值,消除人为输入车轮直径所产生的误差。③车载列车控制系统从上一个信标位置计算列车位移和位置误差。通过加上每一侧的列车长度和列车每一段的位置误差,确定列车的精确位置。
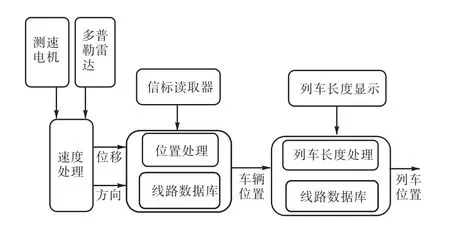
图3 列车定位处理过程Fig.3 Treating process of train positioning
4 结 语
列车定位是列车自动控制技术的核心,CBTC在实现列车自动控制过程中,就根据每列车的位置信息,对线路上运行的列车发送移动授权,保证列车之间的安全间隔。由于在列车定位过程中要通过测速电机、多普勒雷达和信标等多种设备,并将这些信息传送到列车控制系统进行信息处理,在定位过程中对各设备的可靠度要求较高,任何一种设备故障都会导致定位失败而触发紧急制动。今后,列车定位技术的发展一方面需要提高设备的可靠性,另一方面也需要开发更先进的位置检测技术,以实现更加可靠的列车定位。■
[1]GB 50517-2013 地铁设计规范[S].2013.
[2]GB/T 12758-2004 城市轨道交通信号系统通用技术条件[S].2004.
[3]吴汶麟.城市轨道交通信号与通信系统[M].北京:中国铁道出版社,2003.
