X射线脉冲星导航系统选星方法研究
2015-10-14詹亚锋尹海亮
梁 昊 詹亚锋 尹海亮
X射线脉冲星导航系统选星方法研究
梁 昊*①詹亚锋①尹海亮②
①(清华大学宇航技术研究中心 北京 100084)②(清华大学电子工程系 北京 100084)
针对X射线脉冲星导航(XPNAV)系统的选星问题,该文研究了脉冲星可见性、品质因子及空间分布对脉冲星优选的影响。分别建立了第三体阴影遮挡,X射线干扰源影响以及X射线探测器视场角限制造成脉冲星不可见的约束方程;分析了基于克拉美罗界的脉冲星品质因子评价公式;提出了脉冲星组合加权几何精度因子(WDOP)的计算方法,并证明了加权几何精度因子值随着脉冲星观测数量的增加而减小。最后设计了一种基于查表法的脉冲星选星方法。仿真结果表明,设计的脉冲星选星方法可以有效地从适合导航的脉冲星中优选出最佳脉冲星组合。
X射线脉冲星导航;可见性;品质因子;加权几何精度;选星方法
1 引言
X射线脉冲星导航(X-ray Pulsar NAVigation, XPNAV)系统是一种利用脉冲星辐射的X射线信号对航天器进行定位、定姿、授时、测速的自主天文导航系统,具有导航精度高、覆盖范围广、安全保密性强、可自主运行等特点,是目前发展航天器自主导航系统的研究热点之一。选择合适的脉冲星是开展脉冲星导航的首要步骤,它在很大程度上决定了导航系统的导航速度、导航精度及导航稳定性。在对脉冲星进行选择时,通常需要考虑以下几个因素:
(1)脉冲星可见性因素[1,4],即选择探测器可以探测到的脉冲星;
(2)脉冲星品质因素[1,5],即选择到达时间测量精度高的脉冲星;
目前,对脉冲星进行优选的研究成果较少,且大都仅仅针对于上述几个因素中的某一个方面进行讨论[1,6,7]。文献[1]建立了X射线脉冲星数据库,并提出了脉冲星导航系统的粗略选星标准,但是没有明确给出在脉冲星数据库中进一步优选脉冲星的方法;文献[6]和文献[7]分别通过计算几何精度因子值对脉冲星进行优选,但是没有考虑脉冲星可见性因素对脉冲星优选的影响。
本文在综合研究了脉冲星可见性、脉冲星品质因子以及脉冲星空间分布对定位精度影响的基础上,针对脉冲星导航系统的特点,提出了一种新的脉冲星选星方法。仿真结果表明,该选星方法可以有效地优选出最佳脉冲星组合。本文的结构安排如下:第2节介绍了脉冲星导航的基本原理;第3节分析了脉冲星优选的3个主要约束因素;第4节提出了一种脉冲星优选方法;最后给出了相关计算机仿真结果。
2 脉冲星导航原理
脉冲星导航原理如图1所示。由于脉冲星距离地球非常遥远,可以认为脉冲星相对地球和太阳系质心(Solar System Barycenter, SSB)的方向矢量相同。在地球质心坐标时(Geocentric Coordinate Time, TCG)下测量X射线脉冲星信号到达航天器的时间,将其转换为太阳系质心坐标时(Barycentric Coordinate Time, TCB)[1,8],并与脉冲星信号到达SSB的时间做差,将时间差乘以光速,可以得到航天器相对于SSB的位置矢量在脉冲星方向上的投影。当同时观测3颗以上脉冲星时,通过求解线性方程组,即可得到航天器的位置坐标。
基于上述原理,可得到如式(1)的测量方程[5]:


通过式(2)即可得到航天器的位置。
3 脉冲星优选约束因素分析
脉冲星优选的约束因素主要包括脉冲星可见性因素、脉冲星品质因素和脉冲星空间分布因素3部分,其中脉冲星可见性因素是限选条件,即只有可见的脉冲星才可能被导航系统使用;脉冲星品质因素与脉冲星空间分布因素是优选条件,即从满足限选条件约束下的脉冲星集合中,选择出最优的脉冲星组合。

图1 脉冲星导航原理示意图
3.1脉冲星可见性因素
影响脉冲星可见性的因素可以分为第三体阴影遮挡、X射线干扰源影响以及探测器视场角限制3种。
(1)第三体阴影遮挡:当航天器飞行到脉冲星在天体的阴影部分时,脉冲星是不可见的[1],如图2(a)所示。对于围绕地球飞行的航天器,其对第颗脉冲星不可见区域可以表示为

(2)X射线干扰源影响:对于脉冲星辐射的X射线信号,任何在其辐射方向上的X射线源都会对脉冲星的可见性产生影响。在太阳系中,最主要的干扰源来自太阳,如图2(b)所示[4]。当脉冲星的方向矢量与航天器和太阳连线的单位方向矢量之间的夹角小于门限值时,航天器对X射线脉冲星信号的接收将受到极大的干扰,则认为此时脉冲星是不可见的,即

(3)探测器视场角的限制:航天器通过X射线探测器接收X射线脉冲星信号,然而对于每一个X射线探测器,其都有一定的视场角范围限制。通过伺服系统的控制,可以使探测器的探测角范围增大,等效为其视场角增大。当脉冲星位于探测器等效视场范围之外时,X射线探测器将不能够接收到X射线脉冲星信号,此时的脉冲星是不可见的,如图2(c)所示[4]。

图2 脉冲星可见性因素
对于某一特定脉冲星,其在地心惯性坐标系下(i系)方向矢量可以认为是不变的,通过地心惯性坐标系到航天器质心轨道坐标系(o系)的转换矩阵,可以将转换到o系下,即


其中

3.2脉冲星品质因子
利用脉冲星进行导航定位时,需要精确测量脉冲星的到达时间(TOA)。由于不同脉冲星信号的流量密度、信号周期等特征各不相同,因此,需要研究脉冲星的品质因子,以反映使用不同脉冲星所得到的TOA测量误差。目前脉冲星品质因子的确定主要是通过计算脉冲星信号的信噪比,再对信噪比进行不同形式的变形得到[1,5],然而其存在如下问题:
(1)仅考虑了脉冲轮廓尖峰信号强度半极大值处的脉冲宽度,并假设了脉冲形状近似于高斯分布形状,而忽略了不同脉冲星的脉冲形状不同对测量时间精度的影响;
(2)没有考虑在单一周期内存在多个脉冲峰值对定位精度带来的增益;
(3)没有考虑脉冲信号频率对脉冲星定位带来的影响;
(4)没有考虑不同脉冲星背景辐射流量的不同。
克拉美罗界(Cramer-Rao Low Bound, CRLB)是确定性参数在无偏估计条件下能取得的最好性能下界。脉冲星TOA估计的CRLB表征了其无偏估计精度的理论极限值[9,10]。本文综合考虑上述因素,通过使用脉冲星TOA估计的CRLB计算公式,得到了基于CRLB的脉冲星品质因子确定方法。

Crab Pulsar (PSR J0534+2200)是目前伪距测量误差最小的脉冲星,因此,可在一定观测时间的条件下,求Crab Pulsar的伪距测量误差与其它特定脉冲星的最小定位误差的比值,得到该脉冲星的品质因子。

由式(9)可知,脉冲星信号频率越高,光子的辐射能量越大,背景辐射能量越小,周期轮廓中的脉冲宽度越窄,脉冲数量越多,该脉冲星的品质因子越大,利用该脉冲星进行定位的精度越高。
本文对8颗脉冲星的品质因子进行了估计,建立了如表1所示的品质因子表[1,11]。在估计过程中,假设探测器面积为10000 cm2,观测时长为600 s。
3.3 脉冲星空间分布因素
目前,对脉冲星空间分布的研究主要是参考GPS系统几何精度因子(Geometric Dilution Of Precision, GDOP)的计算[5,6],反映了在最小二乘条件下,脉冲星的位置分布对导航精度的影响。然而,与GPS系统不同的是不同脉冲星的TOA测量误差不相同,因此最小二乘解不是理论上的最优解,而应采用加权最小二乘(Weighted Least Square, WLS)的方法[12,13]。对于误差较小的测量量,其具有更大的置信度,需要分配较大的权系数;对于误差较大的测量量,需要分配较小的权系数使得其对最终结果的误差影响较小。
表1脉冲星品质因子表

ID名称赤经(J2000)(hh:mm:ss)赤纬(J2000)(dd:mm:ss)辐射流量(phtons/(cm2·s))周期(s)(m)品质因子 1J0534+220005:34:31.973+22:00:52.061.54e000.03341.151e21 2J0540-691905:40:11.040-69:19:55.105.15e-30.05047.063e30.0163 3J0833-451008:35:20.670-45:10:35.701.59e-30.08939.533e30.0121 4J1513-590815:13:55.610-59:08:08.001.62e-20.15021.760e40.0065 5J1824-245218:24:32.010-24:52:10.741.93e-40.00319.308e20.1237 6J1939+213419:39:38.600+21:34:59.144.99e-50.00169.247e20.1245 7J1057-522610:57:58.840-52:26:56.201.64e-60.19713.409e73.38e-6 8J0437-471504:37:15.710-47:15:08.006.65e-50.00572.266e40.0051


由于正交变换不改变矩阵的迹,所以

根据Sherman-Morrison-Woodbury公式

所以



因此,当观察脉冲星更多时,加权几何精度因子(WDOP)会减小,整个脉冲星导航系统定位精度更高。
4 脉冲星选星方法
与GPS选星相比,脉冲星导航系统的选星条件有两点不同:
(1)不同星源测量误差不同,使得WDOP取代GDOP成为选星的评价函数;
(2)星源位置固定,使得WDOP值不随时间变化。
由于WDOP值相对固定,因此脉冲星导航系统不需要实时计算WDOP值,这样可以建立基于WDOP值的脉冲星导航优选表,通过查表,即可快速有效地选择出最优脉冲星组合。在实际工程应用中,由于不同航天器,可以携带的探测器数目不同,可以分别建立同时观察不同脉冲星数目的脉冲星导航优选表以供使用。基于表1中的脉冲星,本文利用式(12),建立了3颗星的脉冲星导航优选表,如表2所示。在航天器的在轨导航应用中,优选表可以提前存储在专用存储芯片中,如Flash, RAM等。

表2 3颗星的脉冲星导航优选表
基于脉冲星导航优选表,本文设计了如下的脉冲星选星算法:
(1)在星源数据库中选取可供导航使用的脉冲星;
(2)根据脉冲星可见性约束条件式(3)和式(4),确定可以使用的脉冲星集合;
(3)查询脉冲星导航优选表,在可以使用的脉冲星集合中选取排名最高(WDOP值最小)的脉冲星组合,读取WDOP值;
(4)判断WDOP值是否小于门限值。如果WDOP值小于门限值,则选星正常结束,该脉冲星组合即为最优选星结果;如果WDOP值大于门限值,则需要增加一颗待观测的脉冲星,此时如果需要的探测器数量大于载荷所能承担的最大数量,则告警退出,否则,重新查询增加一颗脉冲星之后的脉冲星导航优选表,回到第(3)步。具体的选星流程图如图3所示。
5 计算机仿真
本文基于同时观测3颗X射线脉冲星的条件,对2015年1月26日至2015年2月5日的GPS_BIIA-11卫星进行了定位仿真,仿真过程中假定探测器的等效视场角为180°,且卫星的姿态已经稳定。GPS_BIIA-11的轨道根数如表3所示。

图3 脉冲星优选流程图

表3 GPS_BIIA-11卫星轨道6根数
首先,结合表1中8颗脉冲星的位置和式(3),式(4)得到在一个轨道周期内脉冲星可见数量如图4所示。可见在整个卫星周期内,有两个时间段有脉冲星被遮挡,经过统计,其ID号分别为6和8。其次,查询表2,可以得到最优的脉冲星组合ID号为1, 5和6,由于在某个时间段,6号脉冲星会被遮挡,此时最佳的脉冲星组合ID号为1, 2和5。通过上述分析可知,需要建立分时观测模型[15],当6号脉冲星被遮挡,则需观测1, 2和5号脉冲星;否则,观测1, 5和6号脉冲星。
仿真使用的1, 2, 5和6号脉冲星在航天器本体坐标系下的运动轨迹结果如图5所示。
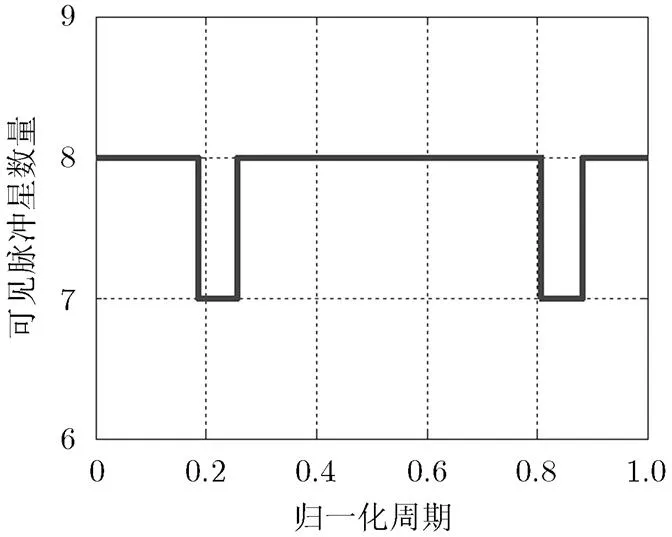
图4 脉冲星可见性仿真

图5 脉冲星在航天器本体坐标系下的运动轨迹
本文使用扩展卡尔曼滤波(Extend Kalman Filter, EKF)[15,16]对上述模型进行仿真,仿真总时长为10 d,滤波器更新时间为600 s。设系统状态,其中为卫星的位置矢量,为卫星的速度矢量。系统的状态模型采用二体模型,状态转移计算采用四阶龙格库塔积分法,系统测量方程可以表示为

本文分别对脉冲星组合ID号为1, 5和6,脉冲星组合ID号为1, 2和5以及分时观测脉冲星组合ID号为1, 2, 5, 6进行了仿真,得到的定位误差曲线如图6所示。

图6 目标定位误差仿真图
经过统计,脉冲星组合为1,5和6的定位误差均值为1.0193 km;脉冲星组合为1, 2和5的定位误差均值为1.9579 km;分时观测脉冲星组合为1, 2, 5和6的定位误差均值为1.1738 km。脉冲星组合1, 5, 6的定位误差小于1, 2和5的定位误差,验证了选星方法的有效性;分时观测脉冲星组合为1, 2, 5和6的定位误差小于只观测1, 2和5的定位误差,但略大于只观测1, 5和6的定位误差,这说明分时观测优选脉冲星的方案比只观测全程可见脉冲星的方法具有更高的定位精度。
6 结束语
脉冲星导航是航天器自主导航的研究热点,脉冲星优选是指在脉冲星数据库中选择出最适合脉冲星导航使用的脉冲星组合。本文分别研究了脉冲星可见性、脉冲星品质因子及脉冲星空间分布对脉冲星优选的影响,提出了一种基于查询脉冲星导航优选表的脉冲星优选方法。通过本文的分析可以得到如下结论:(1)第三体阴影遮挡,X射线干扰源影响以及X射线探测器视场角限制都会减少可用脉冲星的数量,对脉冲星选星过程产生影响;(2)可以通过增加观测脉冲星数量的方式减小定位误差;(3)分时观测优选脉冲星的方案比只观测全程可见脉冲星的方法具有更高的定位精度;(4)基于查表的选星方法可以有效地为导航系统优选出最优脉冲星组合。
[1] Sheikh S I. The use of variable celestial X-ray sources for spacecraft navigation[D]. [Ph.D. dissertation], University of Maryland, 2005.
[2] Sheikh S I, Hanson J E, Graven P H,.. Spacecraft navigation and timing using X-ray pulsars[J].2011, 58(2): 165-186.
[3] 谢振华, 许录平, 郭伟, 等. 一种新的XPNAV系统解脉冲周期模糊算法[J]. 电子与信息学报, 2008, 30(9): 2124-2127.
Xie Zhen-hua, Xu Lu-ping, Guo Wei,. A new algorithm of pulse period ambiguity resolution for XPNAV[J].&, 2008, 30(9): 2124-2127.
[4] 薛舜, 张科, 吕梅柏. 行星际探测X射线脉冲星导航可见性研究[J]. 光电工程, 2014, 41(9): 12-19.
Xue Shun, Zhang Ke, and Lü Mei-bo. Visibility research of X-ray pulsar-based navigation for interplanetary explore[J]., 2014, 41(9): 12-19.
[5] Sheikh S I and Pines D J. Spacecraft navigation using X-ray pulsars[J]., 2006, 29(1): 49-63.
[6] 毛悦, 宋小勇, 柴飞. 脉冲星TOA测量误差及几何精度分析[J]. 测绘科学技术学报, 2009, 26(2): 140-143.
Mao Yue, Song Xiao-yong, and Chai Fei. Analysis of pulsar time of arrival measurement error and dilution of precision[J]., 2009, 26(2): 140-143.
[7] 褚永辉, 王大轶, 黄翔宇. 脉冲星导航中最优脉冲星组合选取方法[J]. 中国空间科学技术, 2011, 31(5): 64-69.
Chu Yong-hui, Wang Da-yi, and Huang Xiang-yu. Selection of the beacon pulsars in pulsars navigation[J]., 2011, 31(5): 64-69.
[8] 张科, 薛舜, 吕梅柏. 地球范围内相对论效应下的时间转移与同步[J]. 电子与信息学报, 2014, 36(8): 1992-1998.
Zhang Ke, Xue Shun, and Lü Mei-bo. Relativistic time transfer and synchronization in the vicinity of the earth[J].&, 2014, 36(8): 1992-1998.
[9] Tran N D, Renaux A, Boyer R,.. Performance bounds for the pulse-phase estimation of X-raypulsars[J]., 2014, 50(1): 786-793.
[10] Emadzadeh A A and Speyer J L. On modeling and pulse phase estimation of X-ray pulsars[J]., 2010, 58(9): 4484-4495.
[11] Emadzadeh A A and Speyer J L. Relative navigation between two spacecraft using X-ray pulsars[J]., 2011, 19(5): 1021-1035.
[12] Yarlagadda R, Ali I, Al-Dhahir N,.. GPS GDOP metric[J]., 2000, 147(5): 259-264.
[13] Sairo H, Akopian D, and Takala J. Weighted dilution of precision as quality measure in satellite positioning[J]., 2003, 150(6): 430-436.
[14] 丛丽, Ahmed I. Abidat, 谈展中. 卫星导航几何因子的分析和仿真[J]. 电子学报, 2006, 34(12): 2204-2208.
Cong Li, Ahmed I A, and Tan Zhan-zhong. Analysis and simulation of the GDOP of satellite navigation[J]., 2006, 34(12): 2204-2208.
[15] 杨博, 张睿, 孙晖, 等. 分时段实时观测脉冲星的单探测器导航方法[J]. 北京航空航天大学学报, 2014, 40(9): 1183-1188.
Yang Bo, Zhang Rui, Sun Hui,.. Navigation method using a single detector based on the observation of X-ray pulsar in different time interval[J]., 2014, 40(9): 1183-1188.
[16] 罗雨, 王永庆, 罗海坤, 等. 基于扩展卡尔曼滤波器的矢量跟踪算法研究[J]. 电子与信息学报, 2013, 35(6): 1400-1405.
Luo Yu, Wang Yong-qing, Luo Hai-kun,.. Study on vector tracking loop based on extended kalman filter[J].&, 2013, 35(6): 1400-1405.
Research on Pulsars Selection for X-ray Pulsar Navigation System
Liang Hao①Zhan Ya-feng①Yin Hai-liang②
①(,,100084,)②(,,100084,)
In order to select the optimal pulsars combination for X-ray Pulsar NAVigation (XPNAV), the influence factors of visibility, quality and space distribution of pulsars are studied. Besides, constraint equations for visibility based on the restrictions of celestial body’s shadow, X-ray disturbance source and detector’s angle of view are built respectively; an evaluation equation for quality factor based on Cramer-Rao low bound is analyzed; the method for calculating Weighted Dilution Of Precision (WDOP), which decreases as the number of observable pulsars increases, is researched. Finally, a method for selecting pulsars based on looking up table is proposed, and its validity is proved by computer simulations.
X-ray Pulsar NAVigation (XPNAV); Visibility; Quality; Weighted Dilution Of Precision (WDOP); Select pulsars
TN967.1
A
1009-5896(2015)10-2356-07
10.11999/JEIT150328
2015-03-20;改回日期:2015-06-18;
2015-07-27
梁昊 liang-h14@mails.tsinghua.edu.cn
国家自然科学基金(61271265, 61132002)和清华大学自主科研项目(2013089244)
The National Natural Science Foudation of China (61271265, 61132002); The Tsinghua University Initiative Scientific Research Program (2013089244)
梁 昊: 男,1989年生,博士生,研究方向为脉冲星导航、测控通信技术.
詹亚锋: 男,1976年生,副研究员,主要研究方向为深空探测、弱信号接收.
尹海亮: 男,1983年生,硕士生,研究方向为脉冲星导航.
