低空无人机影像的获取与处理
2015-10-14葛洪涛
葛洪涛
低空无人机影像的获取与处理
葛洪涛
(新疆维吾尔自治区基础地理信息中心 新疆乌鲁木齐 830002)
无人机低空摄影测量技术应用具有高时效、低成本等特点,在三维重建等方面应用广泛,但在数据处理中也存在一些问题。现以无人机影像处理项目为例,首先说明无人机数据的获取与特点,其次对数据处理的技术方法、流程及关键技术环节进行探讨,并对处理后的结果进行分析。
航空影像 摄影测量 空中三角测量
1 引言
我国社会经济的快速发展,对遥感影像数据获取的要求都越来越高,其中包括资源管理、城乡规划建设、考古及地理国情监测等各个领域。使用卫星遥感获取影像的手段经常会因为天气条件、高度及重访周期等原因而难于满足实际应用的要求,一般的航空摄影成本高昂,对于紧急任务有时难以达到需求。无人机低空摄影测量技术是近几年发展起来的新兴技术,成本低,起降灵活,是对一般航空摄影测量技术和卫星遥感技术获取影像数据的有效补充,并且应用广泛,其中包括国家重大自然灾害的应急处理、地理国情监测、土地管理监测和城市建设规划等[1]。
本文阐述了无人机数据的特点,获取与处理影像的方法,对流程中关键技术步骤进行探讨,并对得到的结果进行精度分析。
2 无人机影像的特点
无人机航空摄影与常规的大飞机航空摄影相比,它的优点主要表现为飞行平台的低空化和相机的小型。无人机根据种类的不同会搭载不同的相机,一般搭载的为非量测型相机,所以在飞行前需要对相机进行检校。无人机对起降场地的要求不高,重量轻、体积小、操控容易易于转场,航摄效率高,能够获取大比例尺高精度影像并且飞行审批手续简单,但无人机在空中作业时容易受到气流和风向的影响,造成飞行姿态不稳定,航向与飞行前设定好的航向会产生偏差,相片旋偏角和重叠度产生偏差,增加了后期图像处理的难度[1]。
3 无人机影像数据的获取
无人机飞行器遥感系统主要有无人飞行器平台、传感器系统、飞控系统、地面监控系统、地面保障系统五部分。飞行平台包括:无人机、维护系统、通信系统。传感器系统包括:小型数码相机、精确标定校检、旋偏改正云台及定点摄影技术。飞控系统是由机载 GPS、磁航向仪、小型 IMU、气压计、高度计等组成。遥感传感器系统、空中自动控制系统、无人机构成无人机空中部分;航线规划系统、地面控制系统以及数据接收系统构成地面监控系统。
空中部分的主要工作是对无人机的航线进行规划并上传到无人机的控制器中以用于监控飞机在飞行中的状态。地面监控系统的主要工作为设计和规划航线,对无人机进行实时控制与飞行中姿态数据进行实时接收。无人机飞行数据传输到地面的控制子系统是利用无线传输通道,地面的监控人员可以根据接收的数据更改本次飞行计划,例如可以对部分拍摄不佳的地区的进行补拍,遇到紧急状况或降落时,可将飞行状态由自动切换成手控飞行[2]。
4 无人机影像处理方法
4.1 无人机影像数据处理方法
空中三角测量是无人机影像处理的关键,首先利用摄影测量软件对无人机获取的影像进行空中三角测量(空三加密),得到准确的内方位元素并对其精度进行检测,利用空三加密定向的成果进行高精度匹配编辑获取数字表面模型,对数字表面模型进行过滤编辑,得到将地表建筑物过滤干净的数字高程模型,再利用数字高程模型对影像进行数字微分纠正,得到以图幅为单位的多幅数字正射影像,最后拼接成最终的成果数据。低空无人机影像处理的流程如图1所示。
4.2 影像处理资料
(1)无人机影像数据
(2)对相机进行检校,得到内方位元素其中包括相机焦距、像主点偏移(X,Y)、径向畸变差系数(K1,K2,K3)、切向畸变差系数(P1,P2,P3)
(3)控制点数据包括控制点刺点片,控制点坐标文件,测区内均匀分布20个地面控制点。
3.3 影像处理关键技术步骤
(1)由于无人机重量轻、体积小,所以在空中飞行时容易受到气流和风向的影响,导致影像旋偏角和倾斜角过大,相邻影像重叠度不稳定,例如大于 90% 或小于 50%,所以在对数据做处理之前需要预先对飞行数据进行分析是必不可少的,了解整个测区的情况,将变形较大的影像除去,在重叠度过高的区域进行影像抽稀,重叠度不够的区域分航线处理,以减少后续数据处理的误差,保证空中三角测量的精度。
(2)无人机航拍一般加载非量测型相机,非量测型相机体积小携带方便,但非量测型相机存在较大的相机畸变,改变了实际景物的地面位置,焦距与像主点都是未知参数,需要对相机进行检校得到准确的内方位元素。
(3)空中三角测量又称作空三加密,是航空摄影测量内业的一个重要环节,也是整个处理流程中的难点,它的精度结果直接影响着后期数字高程模型、数字地面模型、数字正射影像的结果。空中三角测量的精度估算公式为:
其中X控,Y控,Z控为外业测量坐标,X加,Y加,Z加为内业加密坐标,n为控制点个数[3]。
(4)利用空中三角测量的结果生成密集点云,得到整个测区的数字地表模型数据,对数字地表模型进行过滤,去除人工建筑物和植被等一些地表物,然后经过人工编辑得到干净的满足要求的数字高程数据[4]。
(5)数字正射影像是原始影像经过辐射校正、几何校正后,消除各种畸变和位移误差,信息量丰富、细节清楚、应用领域广泛的高新技术产物。数字正射影像是无缝镶嵌,无影像错位及色彩突变,具有色调柔和、纹理清晰。整体色调一致,反差适中的特点[5]。
5 试验及结果分析
5.1 试验区概况
本次试验位于新疆维吾尔自治区某市区,测区地势平坦,主要以平地为主,测区面积约为85 km2,采用航向重叠度为60%,旁向重叠度为30%,航向方向走向为东西走向,共14条航线, 1193张影像。航空摄影相机焦距为20mm,影像分辨率6000*4000像素,像元分辨率为3.889um,航摄相对航高500m,设计GSD(航摄像机CCD一个像元对应的地面尺寸大小)为15cm,试验区内共20个地面控制点。(如图2所示)。
本文采用的是非量测性数码相机,一般非量测相机是不能提供内方位元素的,并且相机安装、调试过程中难免会产生一些残余像差,造成物镜构象畸变,所以在飞行前需要对相机进行标定,计算出相机的畸变参数和内方位元素。采用DLT(直接线性变换方法)对非量测型相机进行检校,计算出内外方位元素(如表1所示)。但非量测性相机信息处理周期短,在地形复杂地区进行外业拍摄具有很强的机动灵活性。

表1:相机畸变参数与内方位元素
5.2 试验结果分析
在试验区结合控制点空三加密后,对加密点的精度结果进行统计,显示出加密结果与外业像控点点位相差不多,对20个地面控制点做中误差,并对平面精度和高程精度分别进行统计,结果表明其精度完全符合城市测量规范和航空摄影测量规范,统计结果见表2:
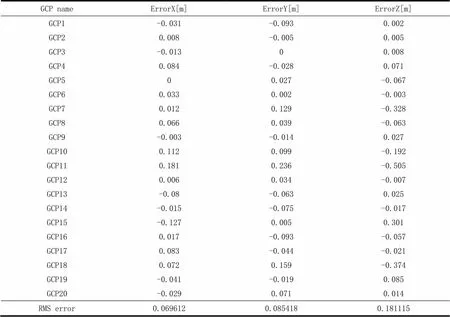
表2:空三加密控制点精度统计结果
在试验区均匀布设8个检查点并对平面精度和高程精度分别进行统计,结果表明其精度完全符合城市测量规范和航空摄影测量规范,统计结果见表3:
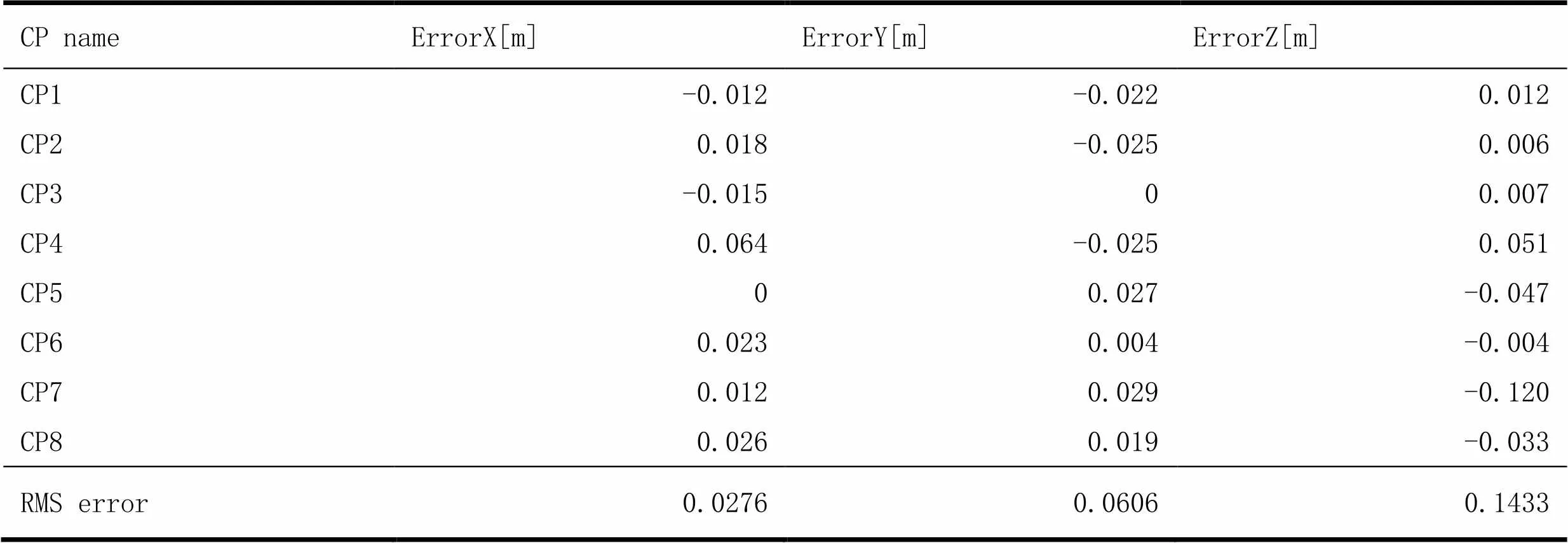
表3:空三加密检查点精度统计结果
试验结果表明,控制点、检查点的从量测结果中可以看出在无人机影像中,平面x中误差、平面y中误差、高程z中误差(m)都符合航空摄影测量的要求,影像的分辨率为15cm,量测结果平面x,y的中误差都在精度范围中,高程z值中误差略大。通过平差计算,对精度结果进行统计,分析对空三加密成果影响的因素有多种,其中主要因素为影像质量,影像的飞行质量会影像影像的清晰度、分辨率等;外业对像控点的选点、刺点以及对点的描述情况是否准确;内业人员加密时对像控点点位的判定是否准确,在不同影像上的点的判位是否一致[6]。
生成 DOM需要利用空三加密后的成果提取DTM,在对处理过程中对影像的亮度和颜色的大幅度变化进行了自动补偿,在单幅影像中计算辐射平差以补偿视觉效果,通过调节相邻图像的匹配度,对测区影像的颜色和亮度进行色彩平衡,将多幅影像合并成一个无缝的,色彩平衡和的几何完美的正射镶嵌图。将单幅的正射影像拼接成一大块连续的正射影像除投影差而带来的影像错位现象以及色彩的差异[7]。正射影像如图3所示。
在实际生产过程中对拼接线的选取原则总结如下:①航片航向重叠一般为60%左右、旁向重叠为30%左右的,在选线时可以充分利用影像的重叠部分,使用重叠区域中对比度较好且地物表达完整的影像,避开斑点,污渍,太亮与太暗的空间,具有地形变形,地物模糊区域。②水区一般线时要保证附近两张影像的色调基本一致或相差不大的影像;③拼接线选择色调较暗的地方通过[8]。
6 结束语
随着无人机航摄技术应用越来越广泛和研究的深入和不断创新,无人机所获取的低空遥感数据完全能满足实际需要,数据处理的结果是可靠的,无人机航测技术是卫星遥感的有益补充,在多云雾地区能解决卫星遥感影像获取困难的问题,在三维景观重建、土地利用调查和环境监测等领域具有广阔的应用前景,更能体现无人机的低空摄影测量技术的多用性与先进性。
[1] 周晓敏,赵力彬,张新利.低空无人机影像处理技术及方法探讨[J].测绘与空间地理信息,2012,35(2):182-184.
[2] 鲁恒,李永树,何敬,等.无人机低空遥感影像数据的获取与处理[J].测绘工程,2011,20(1):51-54.
[3] 卢红艳.浅谈空中三角测量的精度[J].中国地名,2010(7):042.
[4] 吴正鹏,王琳,奚歌.无人机低空遥感系统在土地复垦中的应用[J].城市勘测,2013(6):82-84.
[5] 刘寒.浅谈数字正射影像产品的制作及应用[J].北京测绘,2004(4):20-22.
[6] 高文革,范永杰,宋倩,等.空三加密在数字摄影测量中的精度分析[J].山东国土资源,2010,26(12):26-29.
[7] 张平.数字正射影像的制作技术及问题探讨[J].测绘通报,2003(10):28-30.
[8] 任永涛.影响数字正射影像图影像质量因素分析及对策措施[J].城市建设理论研究,2013(6).
[9] 姚爱善,陈大英,张双全.无人机在测绘中的应用[J].城市建设理论研究(电子版),2013(15).
