深海原位微颗粒观测系统设计及实现
2015-10-13蔡加祥林雄伟陈道毅李邵龙董宇涵
蔡加祥,林雄伟,陈道毅,李邵龙,刘 敏,董宇涵,李 强
(1.清华大学深圳研究生院深圳市近海动力环境演变重点实验室,广东 深圳 518055;2.清华大学 环境学院,北京 100084;3.清华大学机械学院,北京 100084)
随着科技水平的不断进步,人们对自然的探索已经深入到了各个角落。但深海对于人类一直是个谜,而对海底的生物形态、物质迁移等科学问题所知甚少。要深入了解海洋,就需要利用先进的科学技术手段,对其进行观察与监测[1]。
国外对于海洋原位观测仪器的研究开展较早,其中使用最广泛的是浮游生物录像记录仪(video plankton recorder,VPR)和水下录像剖面仪(underwater video profiler,UVP)。浮游生物录像记录仪最初是由伍兹霍尔海洋研究所(Woods Hole Oceanographic Institution,WHOI)的研究人员设计和建造,目前在美国海洋科学界共同使用,以支持世界各地的浮游生物研究[2]。VPR本质是一个水下的视频显微镜系统,设计用来迅速捕捉数以千计的微小海洋植物、动物物种、颗粒物的图像,范围小至50 μm,大至几个厘米大小,其拍摄速率为60帧每秒,最大工作水深为350 m。法国滨海自由城的海洋实验室(Villefranche Oceanographic Laboratory,France)开发的水下录像剖面仪比VPR发展得较晚,但因此也在系统集成、硬件性能上有更多改进和提高。UVP是高精度泥沙、藻类颗粒识别的海底原位观测仪器的典型代表[3],已有成熟的商业化产品出现。其拍摄范围大于100 μm,其拍摄速率为25帧每秒,最大工作水深为6 000 m。
相比于国外的成熟技术,国内在对颗粒、藻类的原位观测方面起步较晚,自主研发的仪器设备也较少。在863计划的资助下,许多高校和科研院所对应用于深海海底原位观测的多项高新探测技术展开了积极的探索和研究。其中,中国科学院沈阳自动化研究所研制了深海自治式航行器[4-6];国家海洋技术中心研制了深海潜标系统[7-8];中国地质大学研制了海底大地电磁测量系统[9]等。
这些仪器能够实现预定的功能,但总体而言,目前我国深海海底监测技术所采用的探测手段仍有巨大的发展潜力,对自主开发的先进海洋动力观测仪器仍有迫切需求。国家也需要在国际前沿开展创新研究,占领高端仪器的国际市场。
针对此情况,在本课题组之前已成功开发的海洋原位观测原型机基础上,设计了一个可布放于深海,进行原位微颗粒观测的仪器,并实际组装、测试了该仪器。海底原位微颗粒观测系统设计意图是把仪器系统长期放置在海洋中,在无人值守情况下高速实时地获取数据。数据的传输可以通过海底观测网或其它无线通讯方式传回地面站。在原型机基础上,对软硬件进行升级改造,将定制的软件烧写在专用图像处理芯片上提高运算速度,最后在实验室进行比对测试,升级为成熟仪器。该观测系统能够同时获取泥沙和藻类颗粒大小、位置和形状参数以及瞬时湍流流速等重要参数,并能得到目前通用技术难以获取的物质通量,对理解海洋中复杂的物质传输过程有重要价值。该系统运用最新的智能高速图像技术,处于国际研发前沿。典型工作状态下,其拍摄范围为50微米到几毫米,拍摄速率为500帧每秒,分辨率为1 280×1 024,最大工作水深为2 000 m。
1 海洋原位微颗粒观测系统的原理及框架
该系统借鉴PIV(particle image velocimetry)的工作原理[10-11],将PIV实验设备小型化,封装在腔体,投放在深海,观测深海的颗粒流动。

图1 观测系统基本工作原理Fig.1 Basic principle of the observation system
整个系统的基本工作原理如图1所示。具体而言,采用深海LED灯,照亮所测流动方向,高速相机对准目标区域,实时采集图像,现场分析处理,并将所得结果传回岸上服务器。与传统PIV方法不同的是,该系统关心微流体,所测流动范围较小,采用高分辨率的显微镜头作为物镜。此外,深海颗粒数量较少,图像中只有稀疏粒子,相比于PIV基于光场的检测,在高速摄影下,基于粒子跟踪的速度检测PTV(particle tracking velocimetry)效率和准确度更高,结果也更有针对性。
整个系统的设计步骤是从整体到局部,明确总体要求,逐步细化各项功能。设计时依据需求来实现功能,基于功能再详细考虑硬件结构及安装布放。整个系统的核心需求为高速相机拍摄深海海底微颗粒。为拍摄微颗粒,需要有显微镜头,高速高清相机。拍摄需要合适光照,因此选定LED等作为光源。需要对拍摄内容进行识别、计算流场,选用智能图像处理芯片。由于是在深海做原位观测,相机、镜头、芯片必须放置在水密腔体里。最后采集的数据需要通过网络传回岸上,做进一步的后处理。
设计中的关键思路是明确数据处理流程及信息传递通路。经过调研及论证对比,将整个系统的信息流程归结成如图2所示。
由深海相机和显微物镜组装成的摄像模块在深海光源下对海底藻类、泥沙颗粒进行视频拍摄,获得海底颗粒图像;图像通过Camera Link接口传输至智能图像处理芯片,由芯片进行图像处理和信息提取,获得颗粒尺寸、位置、亮度等信息;这些信息再通过海底动力观测平台传输至岸基工作站,由岸基工作站对其进行后处理,获得海底湍流速度信息和粒径分布、形状等信息,实现初步藻颗粒种类识别,计算得到各物质通量信息。同时,系统还将选择性地直接上传部分原始图像数据,以并核对和矫正处理结果。
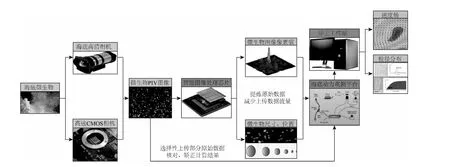
图2 观测系统的数据处理流程Fig.2 Data flow of the observation system

图3 深海原位微颗粒观测系统整体架构Fig.3 Framework of the observation system
深海原位微颗粒观测系统整体架构如图3所示,主要由水下观测子系统、在线处理子系统以及岸基控制处理子系统组成。
其中水下观测子系统包括:1)光源;2)深海摄像模块;3)光学窗口清洁模块。在线处理子系统主要由两块芯片及上面运行的软件组成。其中硬件构成为:1)用于实时图像处理的智能芯片;2)控制芯片,其上附有电源模块。该芯片主要负责接收岸基传过来的指令,实现机械运动(雨刷清洁、变焦齿轮调节、灯光开关及切换)及提供各仪器所需电压。软件主要组成包括图像处理算法和信号控制。岸基后处理子系统主要是岸上工作站运行的PC客户端,负责仪器机械运动的远程控制和图像数据的接收、处理及可视化。
以下依据整体框架,对该系统进行逐一详述。
2 水下观测子系统
水下观测系统主要功能是实现海底高速视频拍摄。它由低能耗、低干扰的深海LED光源,高速高清的摄像机以及光学窗口清洁系统等组成。该系统主要关注于颗粒物的图像成像,而非海底视野内的精确细节,可适当降低对光源光强的要求,使得低能耗的激光或者LED光源能应用于海底拍摄中,减少了对生物的干扰和危害。
2.1 光源
经过广泛对比及筛选,光源选用美国DeepSea Power&Light公司的深海半导体激光光源和深海LED光源,如图4所示。所选光源在满足仪器光照的条件下,具有低功耗、防水、抵抗深海高压等优秀特点。
这两种光源的主要技术参数分别如表1、2所示。

图4 深海半导体激光光源与LED光源Fig.4 Semi-conductor laser light and LED light for the system
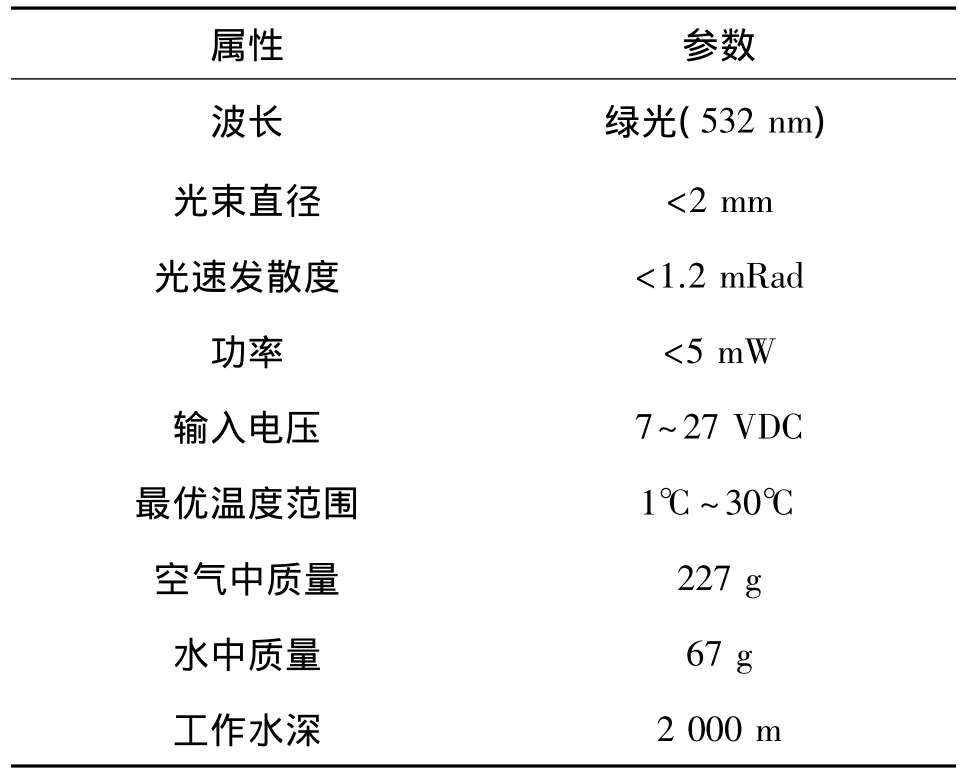
表1 深海半导体激光光源技术参数Tab.1 Parameters of semiconductor laser light source

表2 深海LED光源技术参数Tab.2 Parameters of LED light source
2.2 深海摄像
深海摄像系统由莱卡Z16 APO宏观显微摄像镜头及德国Optronis CL600X2高速摄像机组成,相机与显微物镜通过Cmount连接,如图5所示。该硬件系统封装在深海耐压腔体内,腔体端盖开有直径为1 cm的采集窗口,窗口用蓝宝石制成。深海摄像系统可人为远程操控,实现不同放大倍率,从而实现微米到毫米的分辨范围。选定的Optronis CL600X2相机配置灵活简单,帧率和分辨率作为可调参数,可以根据系统特点选定最优值,从而实现高分辨率和高速摄像。具体而言,该系统可以在分辨率为1 280×1 024下,实现每秒500帧摄像,或者在640×480下,进行每秒1 922帧的高速摄像。通过具体试验试错,选择合适档位,取得分辨率和帧率的平衡。
深海耐压密封腔体的三维设计和内外实物图像如图6示。设计的深海原位观测微颗粒流速仪最大工作水深2 000 m,乘以1.25的安全系数,因此要求密封腔体能承受25 MPa外压。且具有在海水高盐度环境下较强的耐腐蚀耐酸性能力。根据海洋工程设备研究经验,密封腔体主要材料选用TC4(Ti-6Al-4V)钛合金。腔体结构采用圆柱形,以减小高压对密封腔体竖直方向的作用力。圆柱侧面设计为凹凸的箍环,在满足强度要求下,达到减轻腔体壁厚从而减少仪器整体重量的目的。圆柱体的一个端面开有采集窗口,嵌入蓝宝石以满足光学及机械性能要求。此端面安放LED灯和激光灯作为照射光源,灯的开关及切换可以通过控制指令实现。同一端面上,灯的另一边为电机,其上装配有雨刷,同样可以通过控制指令实现对采集窗口和LED的清洁工作。圆柱体的另外一个端面配有水密接头,为整个腔体的电源、网络输入接头以及控制灯光、电机的输出接头。
该腔体的设计是整个观测系统机械部分的一个难点,需要整体规划考虑。腔体的大小需要在明确整体功能及选定相应的硬件后,根据各个硬件的连接关系和尺寸大小,进行量身定做。

图5 观测系统的相机和显微物镜Fig.5 Camera and lens for the observation system
腔体内部结构如图7所示,紧挨着观测窗口是显微物镜及相机,物镜的变焦部分可通过控制命令,由电机驱动齿轮进行精确调节。相机后部的圆盘为隔热板,隔热板后部到另一个端盖之间的位置放置智能图像芯片。
2.3 光学窗口清洁

图7 腔体内部Fig.7 Structure inside the chamber
光学窗口清洁系统主要由电机、雨刷组成。通过控制指令,电机驱动清洁刷清除光学窗口泥沙、藻颗粒等附着物,排除图像采集过程中的明显噪点干扰。根据电机的接头及尺寸,兼顾采集窗口和LED灯的清洁,电机实物、最终雨刷的设计及装配如图8所示。

图8 光学窗口清洁的雨刷和电机Fig.8 Brush and motor
3 在线处理系统
硬件上,在线处理系统主要由两块芯片组成:集成电源模块的信号控制芯片和智能图像处理芯。在两块芯片上各加载相应的软件。
3.1 控制芯片
控制芯片由实验室自主设计,以满足项目的个性化需求。控制系统主要实现三个功能:1)相机物镜放大倍率的调整;2)光学窗口清洁动作;3)灯光的开关及切换。
软件层面上,设计了两种控制方案:1)人为控制模式;2)自动模式。
具体而言,人为控制模式为在岸基设备与控制板通讯正常的情况下,由岸基设备发送控制代码,水下设备执行相应动作,包括照明灯光切换代码,光学镜头清洁代码及镜头变焦代码等。在通讯出现故障的情况下,控制驱动板进入自动模式,根据固定时间周期进行光学镜头清洁动作。该方案灵活性较高。
自动模式:控制驱动板不依靠岸基设备的控制代码进行工作,直接进入自动模式,根据固定时间周期进行光学镜头清洁和镜头变焦等操作。该方案实现简单,可靠性较高。
两种模式中,在保证不出错的情况下,优先考虑人为控制模式。其数据流程如图9所示。
根据人为控制模式的特点,相应控制软件有5个模块:
1)初始化模块,实现控制芯片按照设定模式状态工作;
2)串行信息传输模块,数据的接收和发送,以及接收数据的校验等;
3)GPIO输入输出模块,控制照明灯开关的切换;
4)电机驱动模块,存储相机镜头实时位置、控制相机镜头回到机械零点、控制相机镜头到达相对位置;
5)雨刷清洁控制模块,IO定义设置、清洁雨刷信号解析及清洁控制电路等。
整体软件的流程框图如图10所示。

图9 人为控制模式数据流程Fig.9 Data flow in manual control mode

图10 控制软件的流程图Fig.10 Process diagram of the control system
3.2 智能图像处理芯片
在线处理系统运用先进的DSP+FPGA处理技术,进行图像处理芯片集成,从控制芯片上的电源模块供电,安装于耐压密封腔体内端盖,有效隔离发热,实现水下2 000 m的可靠运行。
图像处理芯片由于对性能要求较高,对选用成熟的芯片,确定了两种方案:
1)国产的图像处理开发板。其主要功能特性:①TI DM6467T DSP处理器;②Virtex-4 FPGA;③支持双路Camera Link接口,支持高分辨率高速工业摄像机;④支持高速千兆以太网,丰富外设接口,极大提升应用的灵活性与扩展性。
2)英国生产的开发板。其主要功能特性:①双TMS320C6472 DSP;②Virtex-5 FPGA;③自带双路base Camera Link接口,支持Single Medium或Full Camera Link;④能够扩展以太网接口。
可以看出两块开发板的核心芯片有共同之处,提供的核心接口也一致,这为后续的算法开发和移植带来了便利。
如上文所说,腔体设计是整个系统机械部分的难点,而图像的采集、处理、传输是整个系统的核心功能,同时也是整个系统软件部分的难点。
在仅有灰度值,位深为8位的情况下(灰度范围为0~28-1),一个像素点需要1 byte(8 bits)表示,一帧分辨率为1 280×1 024的高清图片,大小是1.25 Mbytes。观测系统以每秒500帧的速度采集图像,每秒的数据量为625 Mbytes。在岸上,实验室测试可以通过Camera Link线缆,连接相机采集卡,在台式电脑上实现数据采集和传输。但是仪器布放在水里,基于通用网络传输如此大的数据量无疑是巨大的挑战。
针对这个问题设计了特定的图像处理算法,提取图像关键信息,将625 Mbytes/s的流量降低三个数量级,实际测试时不到200 kbytes/s(具体取决于拍摄图像中颗粒个数)。具体而言,图像信号经过FPGA进入DSP后,对其进行预处理,之后提取颗粒边界信息,前期为了系统的简单、稳定,将每个颗粒边界用数学模型表示,即概化为一个椭圆。最后颗粒信息结果通过TCP/IP协议,传回到岸上工作站进行后处理。
算法实现上,主要分四个步骤:高斯模糊;图像二值化;边界跟踪;模型化。如图11所示。
算法中各个步骤的主要功能:高斯模糊——去除图像中的噪点;二值化——将灰度图片转换为黑白图片;边界跟踪——将每个粒子的边界分别提取出来;模型化——将每个边界模型化为一个椭圆。
颗粒识别算法保留了每个颗粒完整的边界,作为颗粒、藻类识别的重要信息。但在系统设计前期,为简单稳定起见,把海底观测到的每个粒子都近似看成一个对称轴分别平行于x轴和y轴的椭圆,并用4个参数来表示这个椭圆粒子:x坐标、y坐标、x轴向宽度、y轴向宽度。或者其等价表示为椭圆上、下、左、右四条切线值(椭圆的最大外接矩形),如图12所示。因此,一张原始图像经图像算法处理后输出的颗粒位置分布是4n个整型数据(n为单张原始图像中粒子的个数)。
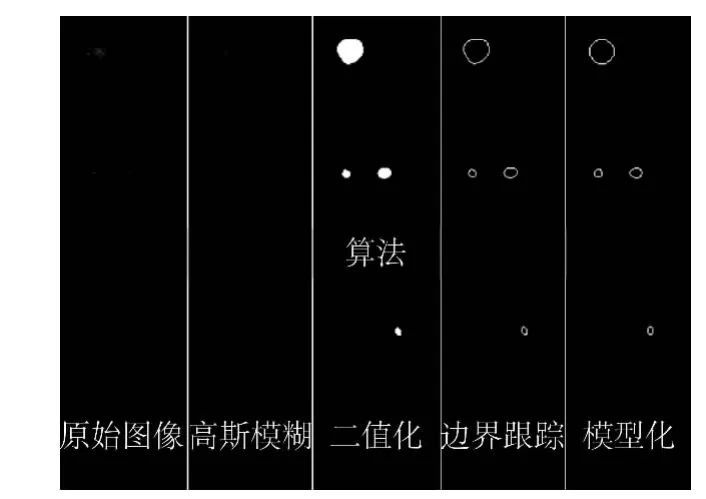
图11 颗粒识别算法Fig.11 Algorithm for particle detection

图12 用椭圆模型化颗粒Fig.12 Modelling the particle by ellipse
研究中分别在强光源、弱光源与高粒子浓度流场、低粒子浓度流场四种组合的实验条件下进行了拍摄,并根据上述算法对图像进行处理,得到各步骤处理前后得到的效果对比图。以其中弱光源低粒子浓度流场为例,进过高斯模糊和二值化后图像如图13所示。

图13 原始颗粒图片Fig.13 Gaussian blur and binarization of the original image
对颗粒提取边缘,以及建立椭圆模型,如图14、图15所示。
综上所述,通过利用高性能高速DSP芯片对大量的原始图像数据进行预处理,只提取颗粒有用的信息,并传输到岸上工作站,极大减少数据流量,实现了高速高清大数据量图像信息的实时在线处理。
由于图像处理算法极大地减少了数据量,因此也带来了很多潜在的信息损失。作为验证和对比,DSP上运行的程序还会根据岸基工作站的要求,传回连续的N帧原始图像以验证算法的准确性,其中N为人为给定的参数。这样在从海量数据提取信息以减轻传输压力的同时确保了数据的准确性。

图14 颗粒边缘识别Fig.14 Edge detection of the particles
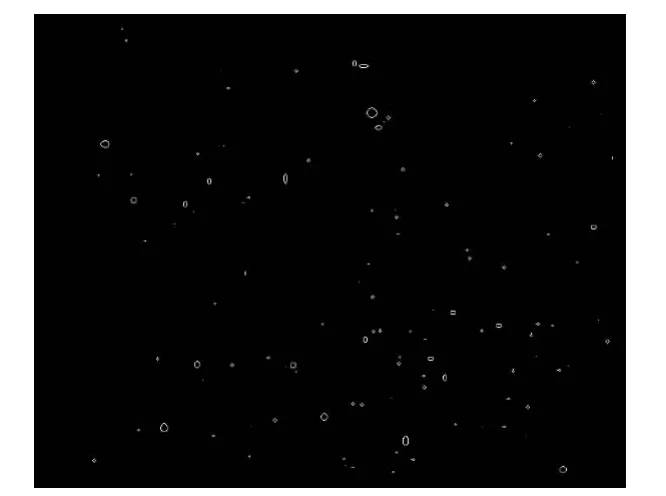
图15 模型化颗粒Fig.15 Modelling the particles
4 岸基后处理子系统
岸基控制、处理子系统硬件上主要是一台工作站。其上运行的软件实现3个功能:1)对系统的机械控制,包括光源的开关和切换、物镜放大倍率调整、光学窗口清洁;2)图像数据的接收,包括处理后的和原始的图像数据;3)基于图像数据,实时统计颗粒信息、计算流场并可视化结果。
实际工作状态下,系统其他部分皆处于深海海底,深海部分通过网络与岸上计算机通讯及数据传输。因此,岸基子系统这也是整个系统中唯一一个控制、管理仪器设备的接口。以下重点阐述颗粒速度的计算。
如何快速、准确识别相邻两帧匹配的颗粒从而算出速度,是整个系统设计的另外一个挑战。考虑到深海中在毫米到微米尺度上观测,藻类、泥沙颗粒可能稀少,用PTV(particle tracking velocimetry)方法计算颗粒流速更为合理、高效。其中基本原理为已知相邻两帧拍摄的时间差dt,找出同一粒子在两帧的位置,算出位移差ds,在相机帧率足够高,即dt足够小的情况下,认为ds/dt就是该时刻目标颗粒的速度。
算法的关键在于如何在第二帧寻找到正确的颗粒,以匹配第一帧中颗粒。经过对传统PTV算法[12-13]的研究,结合本课题的特点,提出了自己改进的PTV算法。
基于匹配概率迭代的经典PTV算法有三个基本原理:
1)流场有一个最大速度Um,所以任何粒子在相邻两帧之间的最大位移不超过R1=Umdt,dt为相邻两帧之间的时间间隔。
2)局部流场满足近似刚体假设,即在同一帧图像内,一个粒子同周围粒子(不妨假设为R2半径内的粒子,此处R2应充分小,以表征局部流场)的速度矢量基本相同。
3)原理2)中那些基本相同的速度矢量的差的模应该在一个微小范围内,不妨假设误差圆半径为R3。
基于这三个原理,算法迭代计算可能匹配粒子的匹配概率,最终在合适的邻域范围内,对应于第一帧的目标粒子,第二帧与之匹配的粒子的概率将趋近于1。
而本课题所设计的观测系统,有如下特点:
1)藻类、泥沙颗粒在运动过程中由于自身转动或者游离到焦平面外,成像大小和边界轮廓可能存在变化,在相邻两帧,同一颗粒可能外形参数存在偏差。
2)系统采用高速相机,所以两帧之间的差别细微,即R1=Umdt很小。
3)系统放置于海底进行原位观测,在显微物镜下,预计视野内藻类、泥沙颗粒稀少,图像内局部流场只有单个或者少数几个粒子。
第一个特点决定了不能根据颗粒的大小、外形轮廓进行匹配,第二、三个特点意味着要找到相邻粒子,R2须取较大值,但这样破坏了局部流场近似刚体假设,不能直接套用现有的PTV算法。在考虑已有的PTV思想、高速相机特点、实际颗粒稀少的基础上,做出如下改进的PTV算法:
1)计算时,所识别的藻类、泥沙颗粒统一当做点,只取其中心坐标。
2)比较相邻两帧粒子的大致位置,估算出合适的Um,从而得出R1。
3)对于第一帧目标粒子P,在第二帧以P为圆心,R1范围内寻找匹配粒子。此时由于粒子稀少,再加相机帧率高,第二帧R1范围内很可能只出现单个粒子,此时认为该粒子就是匹配粒子。
4)如果R1内出现多个粒子,说明此处粒子密度较大,满足传统PTV局部流体近似刚体假设。进行匹配概率的迭代计算。
5)只进行一次迭代,取此时匹配概率最大的可能匹配粒子。
针对本课题的观测对象和系统的观测特点,该算法能够合理、高效求出颗粒速度,画出流场。根据实验室水槽试验得到的数据,运用改进的算法,可以到典型的流场如图16所示。
从图16中可以明显看出,颗粒的个数较为稀少,两帧之间的位移微小。
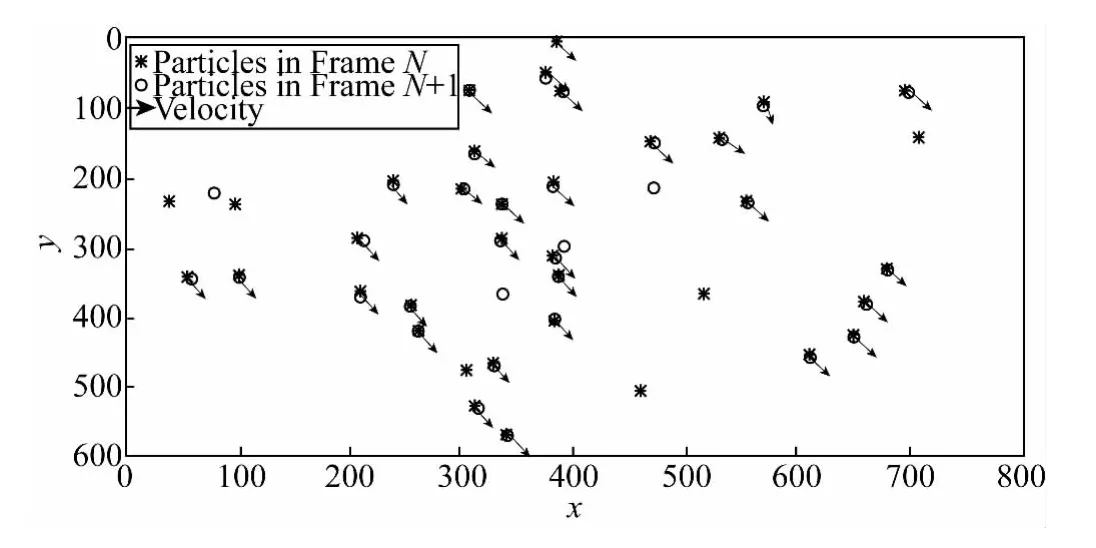
图16 系统观测的典型流场Fig.16 Typical velocity field
5 试验
5.1 实验相关参数确定
为得到最后的实际流速,整个实验需要经历以下步骤:1)拍摄颗粒流动;2)提取颗粒信息(轮廓、位置、大小、灰度等);3)做PTV算法;4)求出实际流速。
在步骤3)用PTV算法得出的流速是一个像素意义下的流速,进行步骤4)时还需要求出各档放大倍率下的实际距离与图像距离的比值,即放大因子M(单位:mm/pixel)。
放大因子通过拍摄显微标准刻度尺获得。
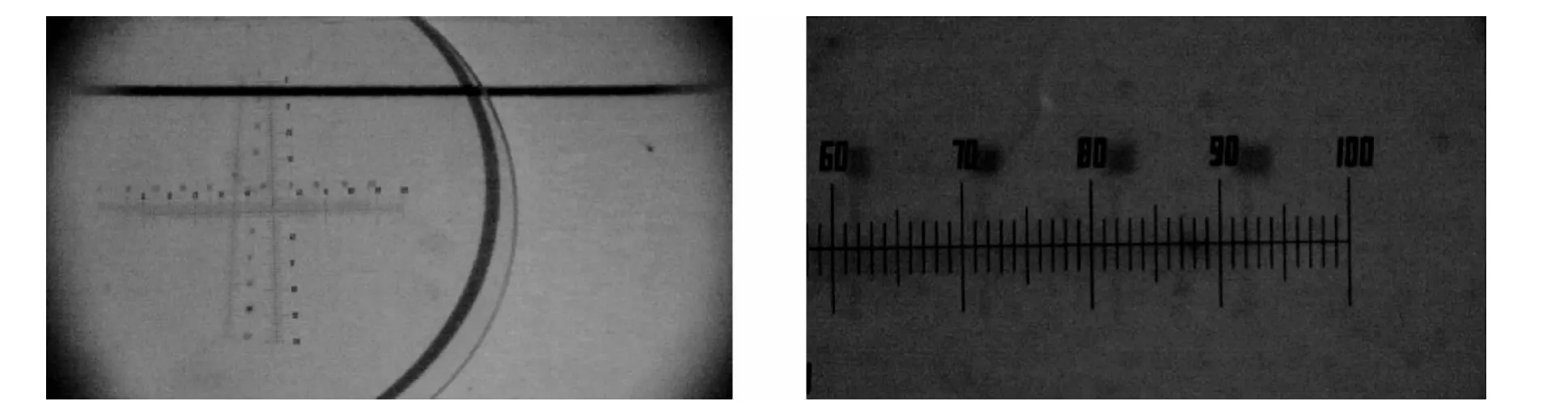
图17 确定放大因子的刻度尺照片Fig.17 Image of scale to calibrate the magnification
以图17拍到的刻度尺为例,为确保图像处理的准确客观,通过霍夫变换,求出图中60 mm刻度和100 mm刻度的直线方程,算出两直线像素意义下的距离,刻度差与像素距离之比即为当前放大倍率下的放大因子。
5.2 流体实验
为了模拟观测环境,本课题设计了水槽做验证实验。整个流体实验设备的设计图和实物图如图18所示。
整个实验装置分上下两个储水箱,上部水箱用有机玻璃制成,下面的水箱为不锈钢制成,上部水箱有个溢出凹槽,通过水管与下部水箱连通。此外两个水箱还通过一段有机玻璃的水槽连通,该段水槽装有阀门和流量计。
实验时,通过水泵持续将水从下面水箱抽到上面水箱,待水面升到与凹槽口齐平,水位保持不变。控制阀门开度,可以调节水槽内的流速,流量大小数值可通过流量计读出。通过在水槽口加入标准颗粒塑料沙(直径为200 μm和40 μm),拍摄其流动状态。通过在已知的断面流速、颗粒尺寸前提下,利用仪器观测流动,软件上可验证颗粒识别算法和改进的PTV算法的准确性、率定相关参数,硬件上可调整仪器各部件的尺寸、布置方式,为验证仪器的正确性和后续的改进提高奠定基础。

图18 流体实验设备Fig.18 Device for hydraulic experiment
6 深海安装及测量标定
仪器在经过室内测试、实验室标定后,会进行一系列的物理测试,包括高低温试验、振动试验等。之后与其他课题合作,流速仪将和成熟的海底观测仪器如ADCP、ADV、CTD等集成在定制的金属框架,进行浅海试验。基于已有的实验室工况数据,通过浅海海试时各个仪器的流速数据对比,进一步标定流速仪的测量范围和测量精度。最后运用于深海极端情况时,也将通过此方法,对比标定流速仪的测速。
通过浅海测试后,搭载有各个观测仪器的金属框架已满足深海布放的条件。但实际深海布放将听从项目组的整体协调安排,预计在2015年实现。
仪器的安装、布放以及浅海测试的情况如图19所示。
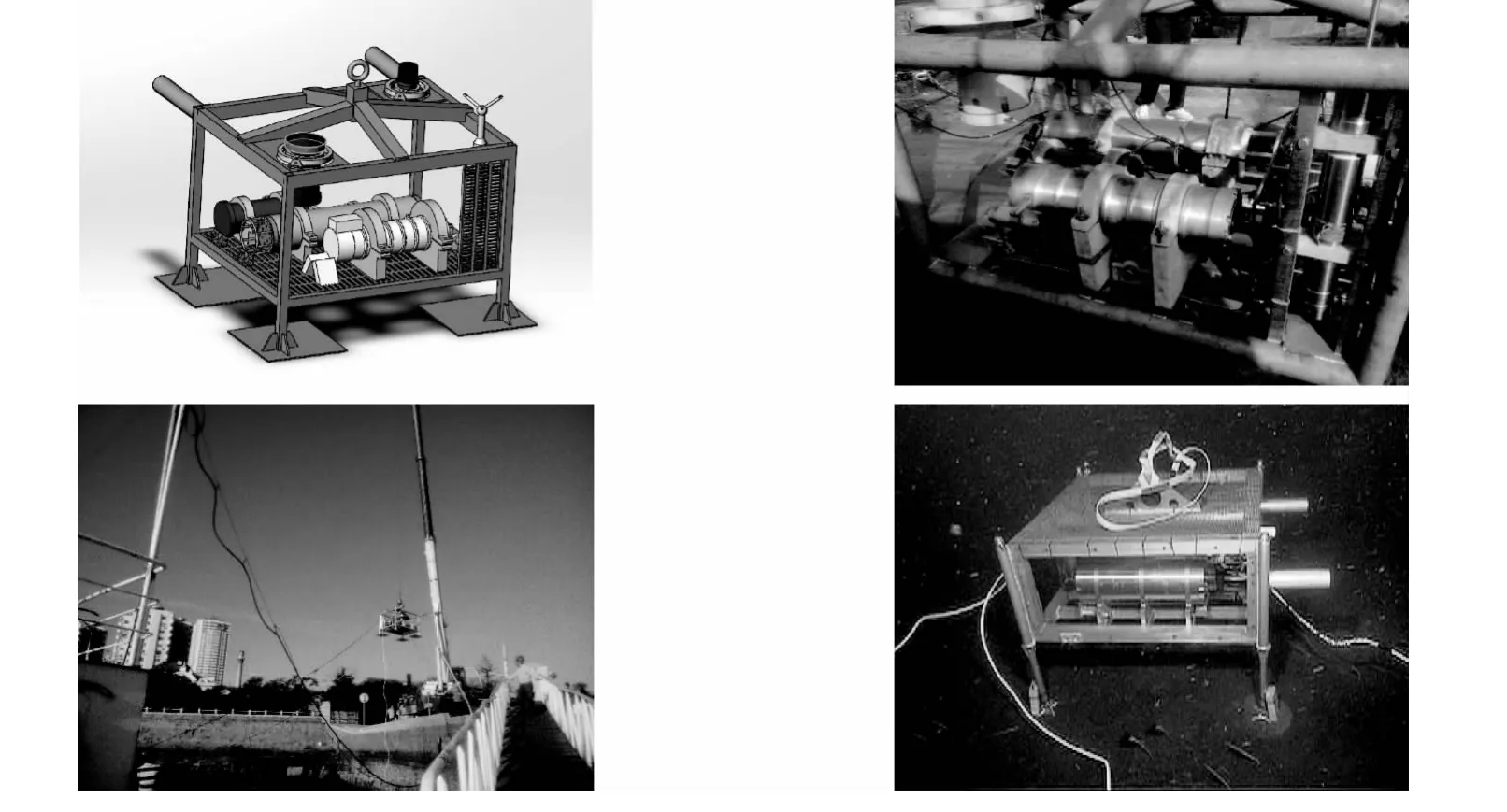
图19 仪器的安装与浅海试验Fig.19 Installation of the instrument and experiment in shallow sea
7 结语
设计了一种海底原位观测系统用于深海藻类、颗粒物的实时观测。分别从水下观测子系统、在线处理子系统、岸基控制子系统对整个系统进行了论证与实现。该观测的基本原理是采用高速高清相机结合高分辨率显微物镜拍摄海底藻类、泥沙颗粒,在线处理后传回颗粒信息。硬件上,系统的主要仪器部件封装在钛合金腔体中,腔体外部设有光源和光学窗口清洁系统;电气上,自主设计信号控制芯片和电源模块,选用成熟的高速智能图像处理芯片;软件上,改进颗粒轮廓识别算法、PTV算法,实现海量数据的实时处理和显示。最后设计了一个室内实验水槽,模拟观测环境,通过实验率定,使该系统有效地实现了微颗粒图像的实时采集、原位处理、网络传输和数据可视化。通过与其他测速仪器的集成安装,以及浅海试验,进一步验证了流速仪的工作性能,也为仪器的测量标定提供了依据。
[1] 进平.发展海洋监测技术的思考与实践[M].北京:海洋出版社,2005.(JIN Ping.Reflection and practice the development of marine monitoring technology[M].Beijing:Ocean Press,2005.(in Chinese))
[2] DAVIS C S,GALLAGER S M,BERMAN M S,et al.The video plankton recorder(VPR):design and initial results[J].Arch.Hydrobiol.Beih,1992,36:67-81.
[3] PICHERAL M,GUIDI L,STEMMANN L,et al.The underwater vision profiler 5:an advanced instrument for high spatial resolution studies of particle size spectra and zooplankton[J].Limnology and Oceanography-Methods,2010,8:462-473.
[4] 封锡盛,李一平.海洋机器人30年[J].科学通报,2013,58(S2):2-7.(FENG Xisheng,LI Yiping.Thirty years evolution of SIA’s unmanned marine vehicles[J].Chinese Science Bulletin,2013,58(S2):2-7.(in Chinese))
[5] 李硕,燕奎臣,李一平,等.6 000米 AUV深海试验研究[J].海洋工程,2007,25(4):1-6.(LI Shuo,YAN Kuichen,LI Yiping,et al.Deep-sea test of 6 000 m AUV[J].The Ocean Engineering,2007,25(4):1-6.(in Chinese))
[6] 庞重光,连喜虎,俞建成.水下滑翔机的海洋应用[J].海洋科学,2014(4):96-100.(PANG Chongguang,LIAN Xihu,YU Jiancheng.Ocean application of the underwater glider[J].Marine Sciences,2014(4):96-100.(in Chinese))
[7] 邓云,姜飞,张孝薇,等.实时传输潜标平台中的深海海流观测系统设计[J].气象水文海洋仪器,2013,29(4):69-72.(DENG Yun,JIANG Fei,ZHANG Xiaowei,et al.Real-time transmission for deep sea current data in subsurface buoy platform[J].Meteorological,Hydrological and Marine Instruments,2013,29(4):69-72.(in Chinese))
[8] 杨跃忠,王东晓.国际海洋观测技术发展趋势与中国深海台站建设实践[J].热带海洋学报,2012,31(2):123-133.(YANG Yuezhong,WANG Dongxiao.Development of international marine observation system and construction of deep-sea station in China[J].Journal of Tropical Oceanography,2012,31(2):123-133.(in Chinese))
[9] 李俊.海洋可控源电磁探测数据处理及软件集成[D].北京:中国地质大学,2013.(LI Jun.Data processing of marine controlled-source electromagnetic sounding and software integration[D].Beijing:China University of Geosciences,2013.(in Chinese))
[10] LIAO Q,BOOTSMA H A,XIAO J,et al.Development of an in situ underwater particle image velocimetry(UWPIV)system[J].Limnology and Oceanography,Methods,2009,7:169-184.
[11] SHI S,CHEN D.The development of an automated PIV image processing software—SmartPIV[J].Flow Measurement and Instrumentation,2011,22(3):181-189.
[12] BAEK S J,LEE S J.A new two-frame particle tracking algorithm using match probability[J].Experiments in Fluids,1996,22(1):23-32.
[13]ADAMS E,HINTON O R,VALENTINE E M,et al.An acoustic imaging system for the concurrent measurementof suspended sediment concentration and particle velocity[J].The Journal of the Acoustical Society of America,1998,104(4):2160-2166.
[14] GRIFFITHS J A,CHEN D,TURCHETTA R,et al.Characterization study of an intensified complementary metal-oxidesemiconductor active pixel sensor[J].Review of Scientific Instruments,2011,82(3):033709.
[15] CHEN D,CHEN C,TANG F E,et al.Boundary layer structure of oscillatory open-channel shallow flows over smooth and rough beds[J].Experiments in Fluids,2007,42(5):719-736.
