初始轨道高度对气动力辅助异面变轨的影响
2015-10-11和宇硕侯砚泽左光张柏楠
和宇硕 侯砚泽 左光 张柏楠
(北京空间技术研制试验中心,北京 100094)
0 引言
随着航天技术发展和深空有大气行星探测活动的增加,气动力辅助变轨技术逐渐成为航天研究的热点之一。气动力辅助变轨技术概念是Howard London于1961年在航空协会第29届年会上首次提出的[1],其核心思想是利用航天器受到的气动力,结合推力器的推力,提升航天器运行轨道改变或转移的效率[2-3]。
气动力辅助变轨概念提出后,已经在星际探测任务方面得到了应用[4]。1997年,用于“火星全球探勘者号”(Mars global surveyor, MGS)的气动力辅助变轨正式成为探测任务的组成部分,火星轨道定位形成一个高偏心椭圆轨道,经过850次大气路径的重复机动,形成一个近圆形火星探测轨道;随后陆续应用到2001年“火星奥德赛”(Odyssey)和2005年“火星勘测轨道器”(Mars reconnaissance orbiter, MRO)任务设计中。但对于其在地球轨道转移方面的应用还没有明确的先例。国内有很多学者开展了相关研究,并取得了一定的理论研究成果。文献[5]对气动力辅助变轨的动力学与控制问题进行了较为系统地阐述,进行了大量计算,基于最优化理论对气动力辅助变轨问题进行优化,得出相关结论;文献[6]对气动力辅助共面变轨进行数值模拟,认为气动力辅助变轨能够在降低推进剂消耗的情况下实现航天器的共面轨道转移;文献[7]分别讨论了HEO-LEO共面变轨和LEO-LEO异面变轨通过气动力辅助变轨节省推进剂的条件,引入“理想气动辅助变轨”假设,不可避免地与实际情况存在一定误差;文献[8]仅根据几何关系,确定了气动力辅助异面变轨的可达范围,但缺少动力学依据;文献[9]采用序列二次规划方法,研究了近地点高度对气动力辅助异面变轨性能的影响,得出结论近地点高度不宜过大,以40~60km为合适。
初始轨道高度是影响气动力辅助异面变轨性能的重要因素。初始轨道高度太高,制动所需速度增量过大;初始轨道高度太低,利用气动力所能改变的轨道倾角太小,相比冲量变轨不存在优势。本文依据航天器大气层内飞行运动方程和轨道动力学,面向改变轨道平面的变轨问题,分析不同升阻比条件下初始轨道高度对气动力辅助异面变轨性能的影响,得出相关结论。
1 气动力辅助异面变轨过程
本文讨论保持轨道高度不变,仅改变轨道倾角的气动力辅助变轨问题。即航天器脱离原轨道进入大气,利用气动力改变轨道倾角跃出大气层后,施加速度增量使其回到初始轨道高度。
变轨过程如图1所示,图中re为地球平均半径,取6 378km;ra为大气层边界地心距;r1为初始轨道地心距;i0为原轨道倾角;if为气动力辅助变轨后轨道倾角;V0为再入大气时航天器飞行速度;γ0为再入大气时飞行路径倾角;Vf为跃出大气时航天器飞行速度;γf为跃出大气时飞行路径倾角;ΔV1为制动速度增量;ΔV2为抬高轨道速度增量;ΔV3为圆化轨道速度增量。

图1 气动力辅助异面变轨示意Fig.1 Schematic diagram of aeroassisted orbital plane change
设i0=0,航天器在A点施加速度增量ΔV1点火制动,进入椭圆转移轨道,该椭圆转移轨道的近地点位于大气层内。航天器在B点进入大气,在大气层内飞行时利用气动升力的侧向分力改变轨道倾角,从E点跃出大气边界后,轨道倾角变为if,沿切向施加ΔV2抬高转移轨道远地点至原轨道高度,最后于远地点F点施加ΔV3圆化轨道,完成变轨。冲量异面变轨过程如图2所示,图中Δiprop为冲量变轨轨道倾角改变量,ΔVprop为冲量异面变轨速度增量。
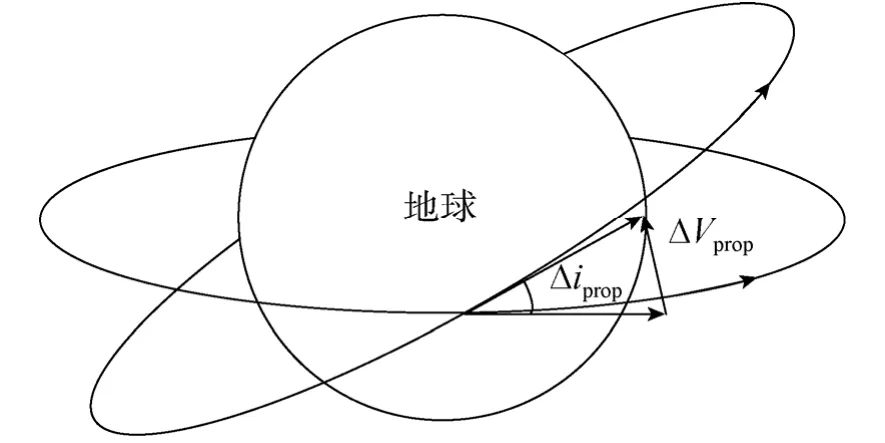
图2 冲量异面变轨示意图Fig. 2 Schematic diagram of impulse maneuver
2 计算模型和方法
本节针对气动力辅助异面变轨建立动力学模型,在前述分析的基础上推导特征速度计算公式,明确气动力计算方法及初始参数,为仿真计算做好准备。
2.1 动力学模型
本文在地球大气层的再入段飞行中,建模时进行如下假设:
1)航天器被看做一质量不变的质点;
2)大气相对于地球静止,即随地球一起旋转;
3)地球表面为球体,密度均匀的天体;
4)航天器仅受空气动力和地球引力的作用;
5)因本文仅研究近地轨道变轨问题,地球大气影响边界取值为100km。
根据上述假设,利用坐标系之间的转换关系,在半速度坐标系下建立航天器在大气层内飞行的理论模型如下[10]:

式中 r为航天器地心距;λ为经度;φ为地心纬度;V为航天器相对地球飞行速度;γ为飞行路径倾角;ψ为航向角;m为航天器质量;g为当地重力加速度;ωe为地球自转角速度;L为气动升力;D为气动阻力;δ为倾侧角。
方程中的重力加速度按下式计算:

式中 gn为地球表面重力加速度,取gn=9.806 65m/s2。
式(1)中定义的航向角是以当地星下点纬线相平行且指东的方向量起,量至速度在当地水平面内的投影,从该处地心矢径反方向看去,若逆时针旋转为正值,顺时针旋转则为负值;倾侧角由r-V平面逆时针转向升力所在平面为正。
航天器在大气层外飞行按轨道动力学模型计算,遵循开普勒轨道公式。
2.2 特征速度的计算
由前文变轨过程分析可知,气动力辅助变轨需要三次速度增量。
ΔV1是制动速度增量,使转移轨道近地点位于大气层内,从而使航天器进入大气层。
设转移轨道半长轴为a1,则

式中 rp为转移轨道近地点地心距。
原轨道环绕速度r1V为

式中 μ为地球引力常数,取μ=3.986×1014m3/s2。
转移轨道远地点速度tAV 为

由式(3)、式(4)和式(5)可得:
是的,父亲也许没有带给我们什么财富、权力和任何世俗的尊荣,清贫的父亲唯一拥有的就是他的清贫,清贫,这是父亲的命运也是他的美德。

ΔV2是航天器跃出大气层后,抬高转移轨道远地点至原轨道高度的速度增量。根据角动量守恒和能量守恒,推导出升轨段转移轨道半长轴2a为

转移轨道在E点速度tEV 为

由式(7)和式(8)可得:

远地点速度tFV 为

由式(4)、式(7)和式(10)可得圆化轨道速度增量ΔV3:

由式(6)、式(9)和式(11)可得气动力辅助异面变轨的特征速度airVΔ为

进而可得到气动力辅助异面变轨轨道倾角改变量airiΔ为


2.3 气动力计算
气动升力L和气动阻力D的计算公式如下:

式中 ρ为当地大气密度,采用美国标准大气(1976年)[11];S为航天器参考面积;CL为升力系数。

式中 CD为阻力系数。
2.4 初始条件
为方便计算,假设i0=0,从λ=0且φ=0处进入大气,初始速度方向沿赤道向东,即初始航向角为0。参照HL-20有翼航天器升力体部分参数[12],仿真初始参数如表1所示,表中H0为大气层高度,其余参数都为初始值。

表1 仿真初始参数Tab.1 Initial parameters of simulation
3 计算结果分析
根据初始条件,质量面积比P=325.6kg/m2,升阻比L/D=2,初始轨道高度在200~3 000km范围内变化。
图3为最大轨道倾角变化量随初始轨道高度的变化曲线。随着初始轨道高度的增加,最大轨道倾角改变量不断增大,增加趋势逐渐放缓。这是因为初始轨道高度的增加导致再入速度的增大,大气层内飞行段升力变大,从而增大轨道倾角变化量。

图3 最大轨道倾角变化量随初始轨道高度变化曲线Fig.3 The relationship between the biggest inclination change and orbit height
图4为高度774km圆轨道,两种变轨方法特征速度随轨道倾角改变量的变化曲线。可以看出,轨道倾角改变量越大,气动力辅助变轨优势越明显。所以利用气动力辅助进行异面变轨,应尽可能增大轨道倾角改变量。后面只需比较轨道倾角改变量最大时两种变轨方法的特征速度。
图5为初始轨道高度从200~3 000km最大轨道倾角改变量对应两种变轨方式的特征速度。可以看出,随着初始轨道高度的增加,冲量变轨特征速度不断增加,最终趋于稳定值,这符合最大轨道倾角改变量的变化趋势;气动力辅助变轨的特征速度先急剧下降,后缓慢增加。初始轨道高度太低或太高,相比于冲量变轨,气动力辅助变轨都不节省推进剂。对于本文选取的算例,只有初始轨道高度在250~2 500km范围内时,气动力辅助变轨才能节省推进剂。在500km初始轨道高度附近,气动力辅助变轨比冲量变轨节约特征速度最多,高达704m/s。
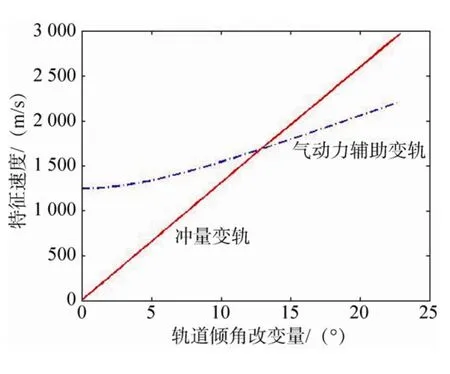
图4 L/D=2(CL=1, CD=0.5), 初始轨道高度为774km时,特征速度随轨道倾角改变量变化情况Fig.4 The relationship between the characteristic velocity and inclination change(L/D=2, CL=1, CD=0.5, initial orbit height is 774km)

图5 L/D=2(CL=1, CD=0.5), 特征速度随初始轨道高度变化情况Fig.5 The relationship between the characteristic velocity and initial orbit height(L/D=2, CL=1, CD=0.5)
图6 表示了气动力辅助异面变轨特征速度三次速度增量随轨道高度的变化趋势,可以看出,制动速度增量占主要部分。随着初始轨道高度的增加,圆化所需速度增量一直缓慢增加,而制动和抬升速度增量都是先急剧减小,再缓慢抬升,所以气动力辅助异面变轨特征速度也呈现出这样的变化趋势。
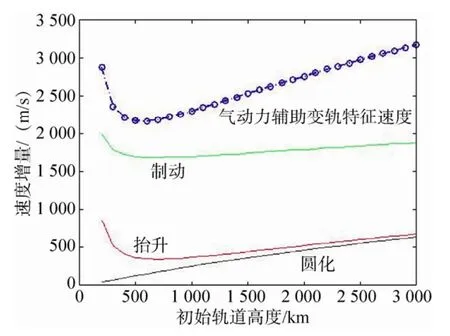
图6 气动力辅助异面变轨三次速度增量随初始轨道高度变化曲线Fig.6 The relationship between the three velocity increment of aeroassisted orbital change and initial orbit height
升阻比对气动力辅助异面变轨性能也会产生影响。前文仿真条件是L/D=2,下面对L/D=1.54(CL=0.77,CD=0.5)和L/D=2.5(CL=1.25, CD=0.5)进行仿真,结果如图7、8所示。
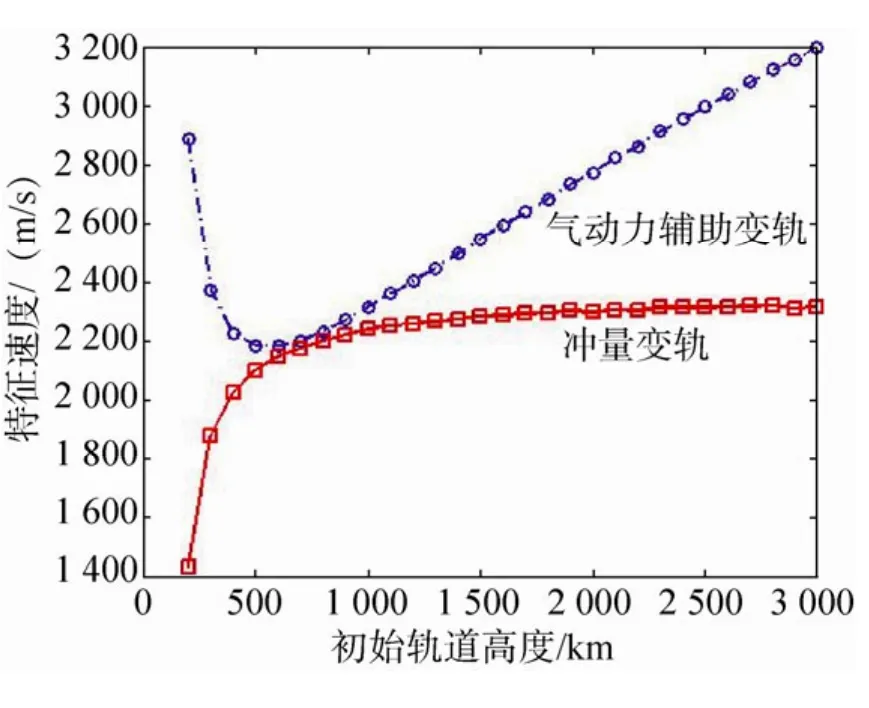
图7 L/D=1.54(CL=0.77, CD=0.5), 特征速度随初始轨道高度变化情况Fig.7 The relationship between the characteristic velocity and initial orbit height(L/D=1.54, CL=0.77, CD=0.5)

图8 L/D=2.5(CL=1.25, CD=0.5), 特征速度随初始轨道高度变化情况Fig.8 The relationship between the characteristic velocity and initial orbit height(L/D=2.5, CL=1.25, CD=0.5)
可以看出,当升阻比L/D=1.54时,初始轨道高度在200~3 000km范围内气动力辅助变轨的特征速度一直高于冲量变轨,两曲线在700km处相切;而当L/D=2.5时,气动力辅助变轨特征速度始终低于冲量变轨,在初始轨道高度700km时节省特征速度最多,为1 558m/s。所以,必须保证足够高的升阻比,气动力辅助异面变轨才能节省推进剂。仿真结果如表2所示。

表2 仿真结果Tab.2 Results of simulation
4 结束语
文章对气动力辅助异面变轨过程进行了仿真,分析了不同升阻比条件下初始轨道高度对气动力辅助异面变轨性能的影响,得出如下结论:
1)当升阻比大于某一数值时,初始轨道高度在一定范围内,利用气动力辅助变轨最大程度改变轨道倾角相比于冲量变轨会节省推进剂。在本文中,当升阻比L/D=2时,初始轨道高度在250~2 500km范围内,气动力辅助异面变轨相比冲量变轨会节省推进剂;
2)我国在研制有翼轨道器时,应尽可能提高升阻比,并选取合适的初始轨道高度,大范围改变轨道倾角。这样可进一步减少气动力辅助异面变轨推进剂消耗,增大变轨机动能力,延长有翼轨道器在轨寿命。
利用气动力辅助变轨大范围改变轨道倾角时,可以显著减少推进剂消耗,极大程度提高变轨效率。
本文的研究结论为有翼轨道器研制提供依据,为未来气动力辅助变轨的工程应用提供技术参考。
References)
[1]London H S. Change of Satellite Orbit Plane by Aerodynamic Maneuvering[J]. Journal of the Aerospace Sciences, 1962, 29:323-332.
[2]南英, 肖业伦, 陈士橹. 同一平面气动力辅助变轨的近似解及分析[J]. 北京航空航天大学学报, 1998, 24(1): 322-329.NAN Ying, XIAO Yelun, CHEN Shilu. Approximate Solutions of the Optimal Aeroassisted Coplanar Transfer of Space Vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 1998, 24(1): 322-329. (in Chinese)
[3]吴德隆, 彭伟斌. 基于气动辅助变轨的变气动外形飞行器概念研究——二层优化与求解方法[J]. 导弹与航天运载技术, 2005(4): 7-12.WU Delong, PENG Weibin. New Concept of Variable Aerodynamic Shape Spacecraft Based on Aeroassisted Orbital Transfer – Bilevel Programming Problem and Solving Method[J]. Missiles and Space Vehicles, 2005(4): 7-12. (in Chinese)
[4]符俊, 蔡洪, 张士峰. 气动力辅助椭圆轨道转移技术研究[J]. 中国空间科学技术, 2012,6(3): 64-71.FU Jun, CAI Hong, ZHANG Shifeng. Research on Aeroassisted Orbital Transfer between Elliptical Orbits[J]. Chinese Space Science and Technology, 2012, 6(3): 64-71. (in Chinese)
[5]吴德隆. 航天器气动力辅助变轨动力学与最优控制[M]. 北京:中国宇航出版社,2006.WU Delong. Aeroassisted Orbit Transfer Dynamics and Optimal Control for Spacecraft[M]. Beijing: China Astronautics Press, 2006. (in Chinese)
[6]张文普, 张成义, 韩波. 气动力辅助变轨的数值模拟[J]. 力学季刊, 2010, 31(1): 8-14.ZHANG Wenpu, ZHANG Chengyi, HAN Bo. Numerical Simulation of Aeroassisted Orbital Transfer. Chinese Quarterly of Mechanics, 2010, 31(1): 8-14. (in Chinese)
[7]刘刚. 典型任务气动辅助变轨节省推进剂的条件分析[J]. 导弹与航天运载技术, 2013(5): 4-6.LIU Gang. Analysis of Fuel-saving Criterion for Typical Aero Assisted Orbit Transfer Mission[J]. Missiles and Space Vehicles, 2013(5):4-6. (in Chinese)
[8]林西强, 张育林. 气动力辅助异面变轨可达范围的判别方法[J]. 国防科技大学学报, 2000, 22(2): 7-10.LIN Xiqiang, ZHANG Yulin. Attainability Domain of Aeroasssited Orbital Plane Change[J]. Journal of National University of Defense Technology, 2000, 22(2): 7-10. (in Chinese)
[9]林西强, 张育林. 近地点高度对气动力辅助异面变轨性能的影响[J]. 中国空间科学技术, 2004, 4(2): 14-19.LIN Xiqiang, ZHANG Yulin. Effect of Perigee Height on Aeroassisted Orbital Plane Change[J]. Chinese Space Science and Technology, 2004, 4(2): 14-19. (in Chinese)
[10]王斯财, 南英, 黄国强, 等. 飞船在大气层外飞行段的主要参数对轨道的影响[J]. 航天返回与遥感, 2009, 30(3):22-27.WANG Sicai, NAN Ying, HUANG Guoqiang, etal. The Influence of Spaceship’s Main Parameters on Orbit in the Phase of Extra-atmospheric Flight[J]. Spacecraft Recovery amp; Remote Sensing, 2009, 30(3): 22-27. (in Chinese)
[11]杨炳尉. 标准大气参数的公式表达[J]. 宇航学报, 1983, 4(1): 83-86.YANG Bingwei. Formulization of Standard Atmospheric Parameters[J]. Journal of Astronautics, 1983, 4(1): 83-86. (in Chinese)
[12]Richard W P. Six-Degree-of-Freedom Guidance and Control-Entry Analysis of the HL -20[J]. Journal of Spacecraft and Rokets, 1993, 30(5): 537-542.