光学线阵相机在轨几何定标平台设计与实现
2015-10-11常学立龙小祥应荷香王密张致齐
常学立龙小祥应荷香王密张致齐
(1武汉大学测绘遥感信息工程国家重点实验室,武汉 430079)
(2中国资源卫星应用中心,北京 100094)
(3浙江省地理信息中心,杭州 310012)
0 引言
随着星载相机空间分辨率的不断提高,卫星在轨几何定标已成为卫星地面数据处理中的一个关键环节。近几年,国内学者针对单一卫星,从在轨几何定标模型和定标参数解算方面开展了相关的工作,文献[1-2]利用解算相机安装矩阵对“资源一号”(ZY-1)02B卫星的HR相机进行了几何外检校;文献[3-4]通过姿态角常差的手段对SPOT-5和QuickBird卫星进行了定标实验;文献[5]利用角度不变原理解算光学畸变模型参数对HJ-1-A/B卫星进行了内方位元素定标实验。但是,针对不同卫星一体化的定标处理模式和定标处理流程方面仍缺乏系统研究,在多星、多相机在轨几何定标软件平台的实现方面也缺少进一步的尝试与探索。
本文根据国产高分辨率光学卫星搭载的线阵相机的设计特点,选取了一种基于探元指向角和相机安装角的线阵相机几何定标模型[6-8],利用国内具有代表性的资源系列卫星对应的相机数据,从卫星地面数据处理的角度,分析其对在轨几何定标的需求,从在轨几何定标的模式、流程等方面对星载线阵相机的定标处理进行介绍,最后根据所制定的模式与流程设计并实现了通用在轨几何定标软件平台,并利用资源系列卫星数据进行了实验验证。
1 星载线阵相机在轨几何定标模式
1.1 星载线阵相机几何定标模型基础
影响星载线阵相机几何定位精度的误差主要包括相机安装误差、时间测量误差、外方位元素观测误差以及由于相机内部畸变导致的误差等,其中相机安装误差和相机内部畸变导致的像点误差属于系统误差,需要进行在轨的标定与补偿。考虑到卫星高轨窄视场角的成像特性,相机内部参数之间和相机内部参数与外方位元素之间具有很强的相关性,同时结合星载线阵相机严格成像模型,构建具有通用特点的在轨几何定标模型[7-8]:
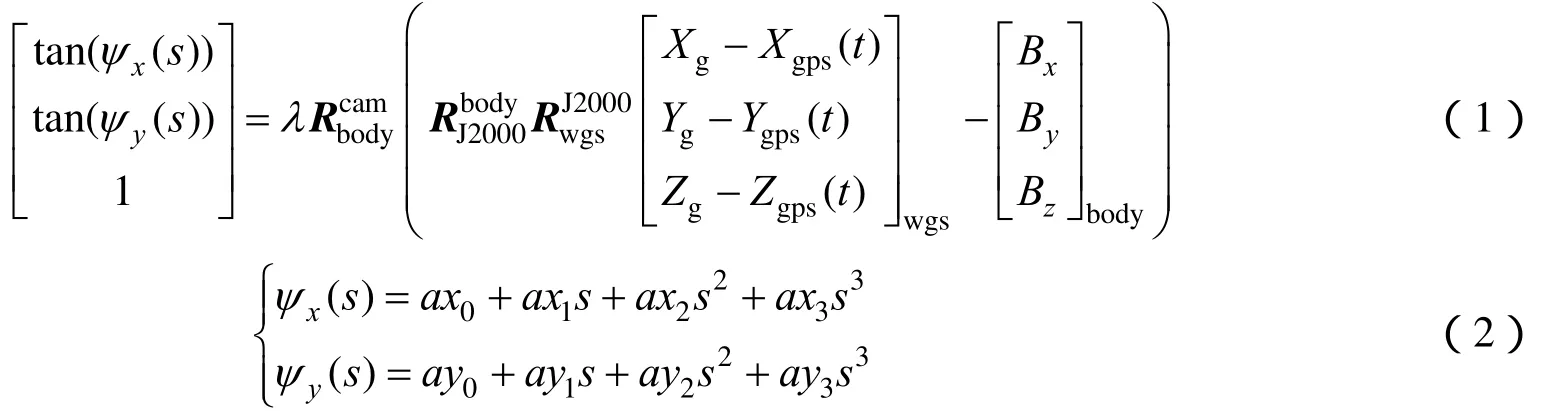
根据选择的指向角模型可以将几何定标参数分为内外两类,参照式(1)、(2),一类是外定标参数,用于补偿相机安装角误差,确定相机坐标系在卫星本体坐标系中的指向,为内定标参数的解算确定参考基准;另一类是内定标参数,采用三次多项式的方式用于补偿相机内部各种畸变导致的像点误差,确定CCD各探元在相机坐标系(参考基准)下的指向,内定标参数与外定标参数两者共同确定CCD各探元在卫星本体下的绝对指向。
1.2 光学卫星相机类别及其对应定标模式
目前,光学卫星相机成像载荷主要分为全色和多光谱两种,在设计上大多采用多片拼接的方式实现大视场成像[9],为了实现卫星数据更好的处理和应用,需要针对相机不同的成像和设计特点确定不同的在轨几何定标模式。
从卫星地面数据处理的角度,对于全色相机,评价其处理效果的一个重要指标就是几何定位精度;对于多光谱图像,不仅有几何定位精度方面的要求,还要保证波段与波段之间具有较高的配准精度;对于立体成像相机,则需要相机与相机之间精确的交会精度。因此,本文将在轨几何定标模式分为绝对定标和相对定标两种。绝对定标是以地面控制信息为基准,利用几何定标模型进行定标参数的解算,从而获取图像上像点精确的绝对位置,即解决影像的几何定位精度,相对定标则是以某一波段和某一相机为相对基准,利用影像的连接信息进行基于相对基准的定标参数的解算,从而获取波段之间和不同视角相机之间的同名物点间精确的相对位置,从而解决波段间的配准精度和立体成像的交会精度。
2 星载线阵相机在轨几何定标的流程
2.1 在轨几何定标主要流程
结合星载相机的特点和一体化几何定标平台构建的需求,本文将卫星在轨几何定标分为定标数据组织、定标区域选取、定标控制获取、定标参数解算和定标精度验证5个环节,如图1所示。其中定标数据组织是根据平台搭载相机的特点,选择合适的定标模式,进行待定标数据的规范组织,为后面的定标处理环节提供相对统一的数据输入;定标区域的选择是从待定标影像上选取具有较好地面覆盖特征的定标区域;定标控制获取是在所选取的定标区域中,通过自动匹配或交互选点的方式获取与绝对基准或者相对基准之间的控制信息与连接信息;定标参数解算是使用定标控制信息和连接信息,利用定标模型分别求解内外定标参数;定标完成后,需对定标结果进行精度验证,确定定标结果的正确性和可靠性。

图1 在轨几何定标主要流程Fig.1 The main process of on-orbit geometric calibration
2.2 关键设计环节
为取得可靠的几何定标参数,需要结合相机的特点和不同的定标模式,对定标流程中每一个环节进行规范而精细的操作。本文结合资源系列卫星在轨几何定标处理任务,对其处理过程中的关键处理环节进行说明。
2.2.1 待定标数据的获取与组织
对于在轨定标处理的全部流程,待定标数据是指整个定标处理的数据输入,其数据品质的好坏是影响定标处理精度的重要因素,也决定着定标处理的成败。待定标数据主要结合几何定标场的覆盖范围,从地面数据处理系统中获取,经处理,提取出经过相对辐射校正的图像数据和对应的姿态、轨道观测数据,对于多片CCD拼接的相机和多光谱相机,需要分片、分波段输出对应图像数据。
星载线阵相机大多采用多片CCD拼接形成宽视场成像,多片CCD利用内视场拼接、光学拼接以非共线或共线的方式进行排列,在构建其几何成像模型时,具有统一的姿态和轨道观测参数,对于在轨几何定标,具有统一的外定标参数,使得在待定标数据组织时,对于多片CCD拼接的相机,需要指定主片CCD,在定标参数解算时,解求主片CCD的外定标参数即可作为整个相机的外定标参数。另外在选择相对定标模式进行数据组织时,对于多光谱相机,需要指定参考谱段作为相对基准,对于立体成像相机,则需选择其中某一相机作为相对基准。
2.2.2 定标样本区域的选取
根据线阵相机的成像特点,某一成像时刻卫星载荷获取的扫描行影像满足中心投影,其几何定标模型也以扫描行为单位建立,即每一行都有其独立的外方位元素观测值,而姿态和轨道的观测值因为仪器观测频率和星上存储的限制,并不是每一扫描行都有观测记录。在几何建模时,每一行所需的外方位元素观测值需要通过数学建模(如内插)获取,而在几何定标的过程中,姿态和轨道的观测值作为真值参与解算,为了尽量避免设备观测和数据建模处理带来的误差对定标结果产生影响,在保证后期定标控制点和连接点有效获取的前提下,对沿卫星轨道的方向选取合适的扫描行数作为定标的样本区域,定标样本区域选取过程如图2所示。对于多片CCD拼接的相机,由于姿态轨道观测的统一性和外定标参数的一致性,在区域选取时,可采用同一成像时间段的原则进行。
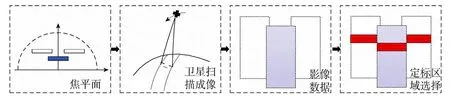
图2 定标样本区域选取示意Fig.2 The schematic diagram of sample selection area
2.2.3 定标参数解算
定标参数解算环节是整个定标处理过程中的一个重要环节,对于不同的定标模式,绝对定标和相对定标在定标参数解算环节也存在差异,结合相机在焦平面上多片CCD的拼接设计的特点,对于全色相机的在轨几何绝对定标,内外定标参数的解算采用分步迭代的方式进行,由于多片CCD安装在同一焦平面下,具有一致的外定标参数,可以利用主片CCD数据首先进行外定标和内定标参数的解算,其余片则以获取的主片外定标参数作为基准进行内定标参数的解算;对于多光谱多波段的相对定标,在以参考波段所确定的相对基准的基础上,其余波段数据根据定标匹配获取连接点依次解算与参考波段之间的相对畸变参数。
3 定标软件的实现及其实验验证
3.1 定标软件的实现
在确定几何定标模型和流程后,在此基础上设计并实现了卫星线阵相机的几何定标软件,软件系统以组件和控件相结合的方式在VC++9.0环境下独立开发而成。软件主要包括工程管理模块、数据显示模块、定标密集匹配模块、定标参数解算模块和定标精度验证模块。定标管理模块主要由待定标数据、定标场参考数据、相机文件等数据以工程的形式组织起来,实现定标工程的新建、打开和保存功能;数据显示模块实现待定标影像数据分片显示、定标数据的地面区域范围显示、密集匹配点与影像的叠加显示等功能,方便用户查看影像的地面覆盖情况以选择合适的定标样本区域;定标密集匹配模块是在确定定标区域的基础上,实现待定标影像数据和定标场参考数据的密集控制匹配,根据定标模式的不同实现待定标数据之间连接匹配,为定标参数解算提供可靠有效的控制信息和连接信息;参数解算模块主要利用控制信息和连接信息,利用外方位元素观测值进行几何定标建模,根据所选取的定标模式依次解求内外定标参数;定标精度模块主要对定标解算的结果进行验证,输出相应的定标精度报告。
3.2 实验验证
为了验证本文所确定的定标模式和流程的合理性、软件的可操作性以及定标效果,选择ZY-102C卫星的HR相机、ZY-3卫星的MUX相机的成像数据,利用在轨几何定标软件进行了绝对定标和相对定标的实验验证。
对于ZY-102C卫星的HR相机,选取2013年3月15日获取的HR相机数据,参考数据为河南安阳地区高精度DOM(数字正射影像图)和DEM(数字高程模型)数据,如图3所示,利用地面数据处理系统生产定标场区域的分片图像数据和对应的辅助数据,最后利用在轨几何定标平台,按照绝对定标的处理流程对其进行在轨几何定标处理;对于ZY-3卫星的MUX相机,选取2013年11月18日的MUX相机数据,利用地面数据处理系统生产对应区域的分波段图像数据和辅助数据,依据相对定标的处理流程对其相对几何定标的模式进行。
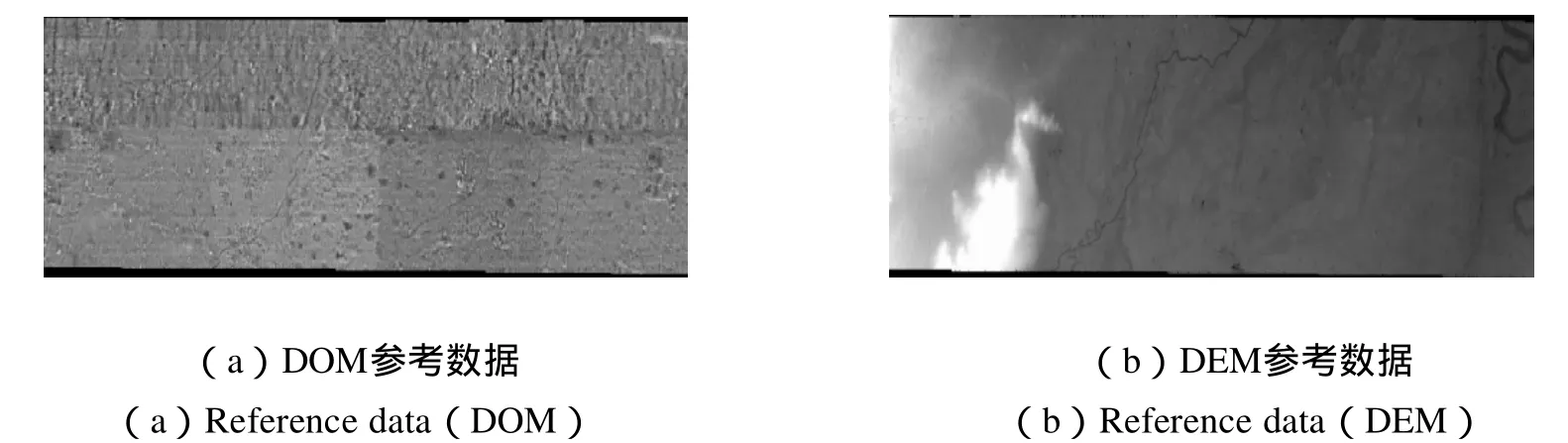
图3 安阳几何定标场参考数据Fig.3 The geometric calibration reference data of Anyang
经过在轨几何定标平台操作,选取HR相机(相机采取3片CCD拼接的方式)的中间片(第2片)作为主片进行外定标参数的解算,在此基础上依次对各片进行内定标参数的解算,最终获取的相机畸变曲线如图4所示。
对于ZY-3卫星的MUX相机(4波段),对其进行在轨相对几何定标时,选择波段2(蓝波段)为相对基准波段,经在轨定标处理后,获取的波段间的相对畸变曲线如图5所示。
最后利用在轨几何定标的结果进行了多景数据(不同成像时间)的产品生产,分别验证了HR相机的绝对定位精度和MUX相机的波段配准精度,具体精度验证结果见表1、2。
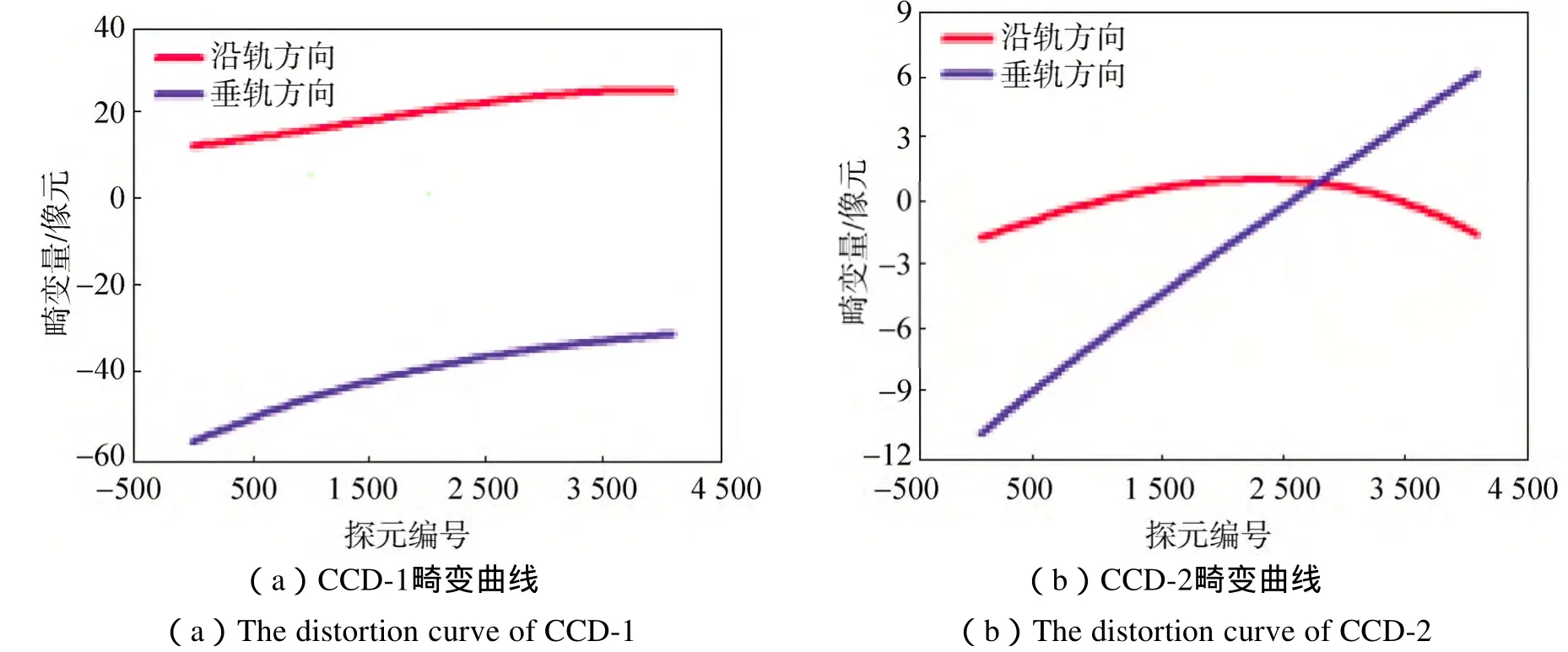
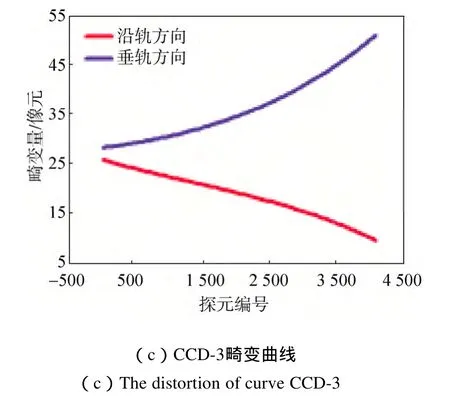
图4 ZY-102C卫星的HR相机相机畸变曲线Fig.4 The distortion curves of three CCDS in ZY-1 02C-HR camera
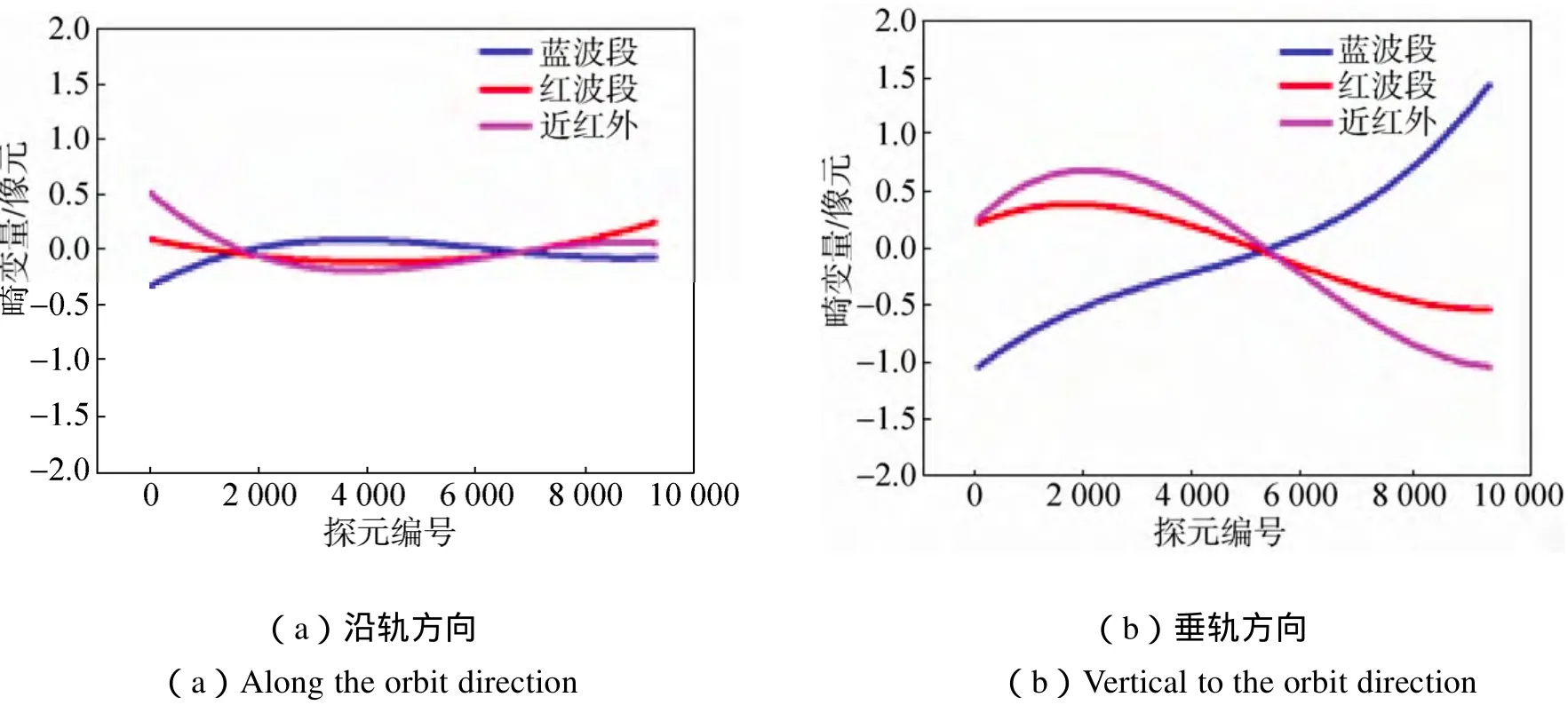
图5 ZY-3卫星的MUX相机波段间相对畸变曲线Fig.5 The band-to-band relative distortion curve of ZY-3-MUX camera
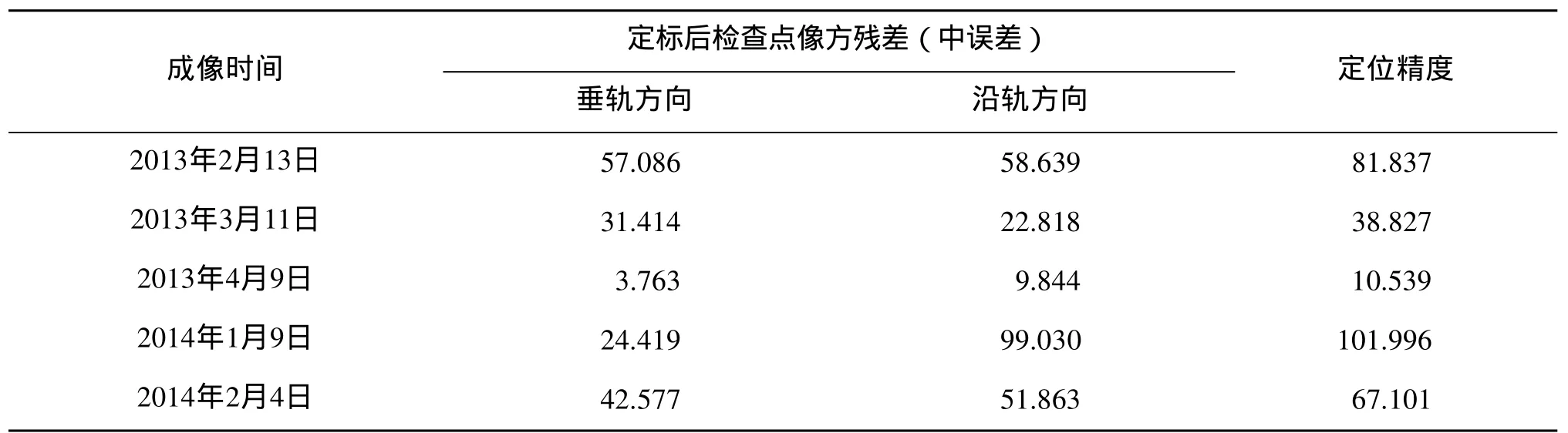
表1 ZY-102C卫星的HR相机在轨绝对定标后几何定位精度Tab.1 The geometric accuracy after on-orbit absolute calibration of ZY-1 02C-HR camera像元
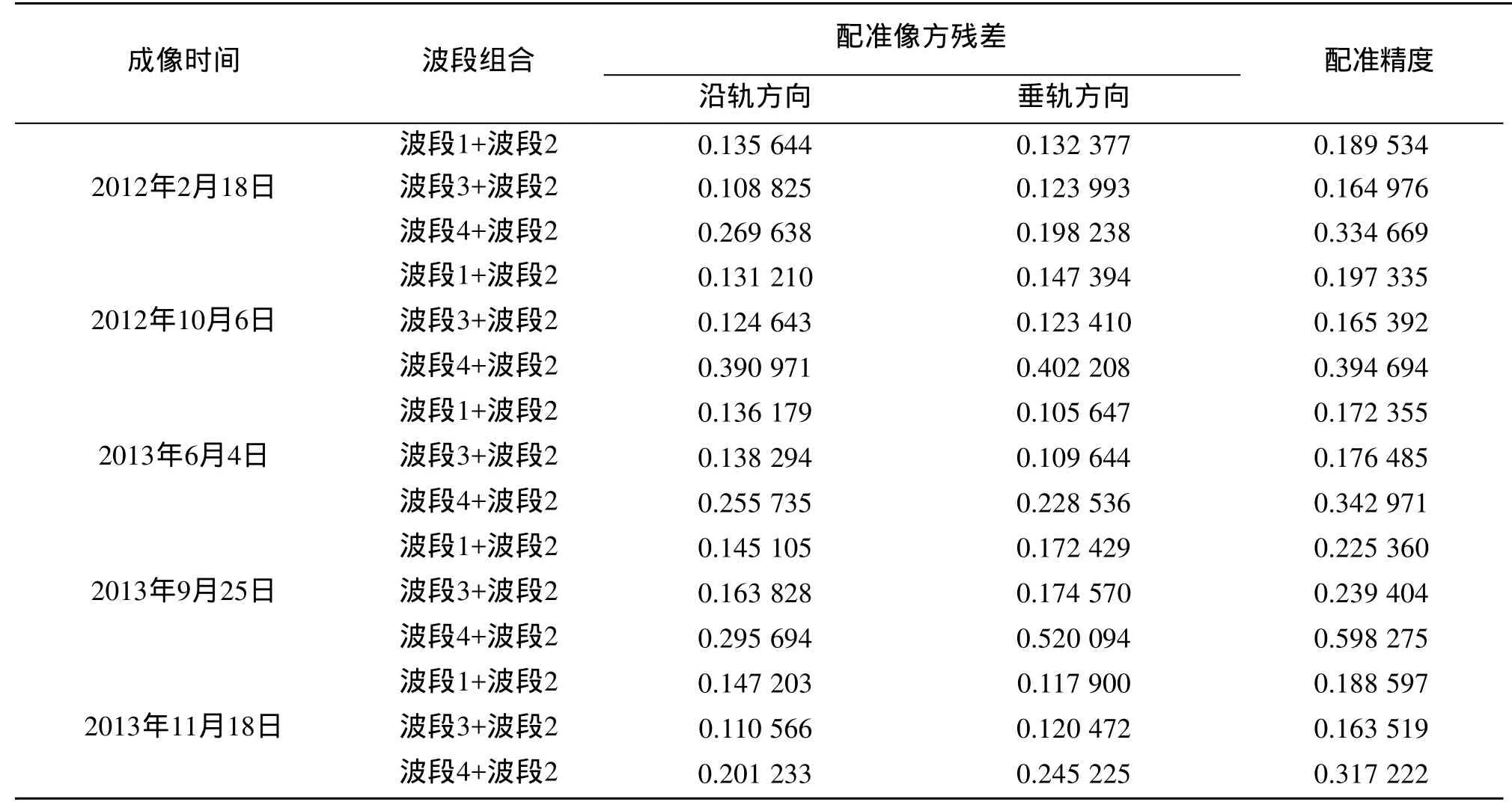
表2 ZY-3卫星的MUX相机在轨相对定标后波段配准精度Tab.2 The registration accuracy after on-orbit relative calibration of ZY-3-MUX camera像元
从精度验证的结果来看,通过在轨绝对定标,ZY-102C卫星HR相机的无控几何定位精度达到了100~150m(地面分辨率2m,定标前无控几何定位精度在1000m左右)[10-14],对于ZY-3卫星的MUX相机,经过波段之间的相对定标,在进行地面数据处理中,利用波段之间的相对定标参数直接进行几何处理,波段之间达到0.2个像元的配准精度。其中,ZY-102C卫星HR相机的绝对定标和ZY-3卫星MUX相机的相对定标过程都在几何定标软件平台上进行。
4 结束语
本文选取ZY-102C卫星的HR相机、ZY-3卫星的MUX相机数据,利用设计的卫星在轨几何定标一体化平台软件分别进行了绝对定标和相对定标实验,对定标方法、软件功能、定标精度进行了验证。实验验证表明,本文设计和实现一体化定标软件能满足多模式在轨几何定标需求,有效提高了影像的几何定位精度。随着未来卫星数据地面分辨率的提高,对卫星地面处理精度的要求也越来越高,作为提高几何定位精度最重要的手段,常态化的在轨几何定标将纳入地面数据处理系统中成为其业务化运行的一部分。本软件已经在ZY-102C和ZY-3卫星上已实现业务化运行,本文所确定的线阵相机在轨几何定标模式、流程可推广至其他星载线阵相机。
References)
[1]祝小勇,张过,唐新明,等.资源一号 02B卫星影像几何外检校研究及应用[J].地理与地理信息科学,2009,25(3):16-18.ZHU Xiaoyong, ZHANG Guo, TANG Xinming, etal. Research and Application of CBERS -02B Image Geometric Exterior Calibration[J]. Geography and Geo- Information Science, 2009, 25(3): 16-18. (in Chinese)
[2]张过,袁修孝,李德仁.基于偏置矩阵的卫星遥感影像系统误差补偿[J].辽宁工程技术大学学报,2007,26(4):517-519.ZHANG Guo, YUAN Xiuxiao, LI Deren. Redressing System Error in Satellite Image Based on Bias Matrix[J]. Journal of Liaoning Technical University, 2007, 26(4): 517-519. (in Chinese)
[3]袁俢孝,余俊鹏.高分辨率卫星遥感影像的姿态角常差检校[J].测绘学报,2008,37(1):36-41.YUAN Xiuxiao, YU Junpeng. Calibration of Constant Angular Error for High Resolution Remotely Sensed Imagery[J]. ActaGeodaetica et Cartographica Sinica, 2008, 37(1): 36-41. (in Chinese)
[4]余俊鹏.高分辨率卫星遥感影像的精确几何定位[D].武汉:武汉大学.2009.YU Junpen. Accurate Geometric Positioning of High Resolution Satellite Remote Sensing Imagery[D]. Wuhan: WuhanUniversity, 2009. (in Chinese)
[5]郝雪涛,徐建艳,王海燕,等.基于角度不变的线阵推扫式CCD相机几何畸变在轨检校方法[J].中国科学:信息科学,2011,41(增刊):10-18.HAO Xuetao, XU Jianyan, WANG Haiyan, etal. An Angle Invariance-based Method of On-orbit Geometric Calibration for the Pushbroom CCD Camera[J]. Science China: Information Sciences, 2011, 41(Supplement): 10-18. (in Chinese)
[6]李德仁,王密.“资源三号”卫星在轨几何定标及精度评估[J].航天返回与遥感,2012,33(3):1-6.LI Deren, WANG Mi. On-orbit Geometric Calibration and Accuracy Assessment of ZY-3[J]. Spacecraft Recovery RemoteSensing, 2012, 33(3): 1-6. (in Chinese)
[7]杨博,王密.资源一号02C卫星全色相机在轨几何定标方法[J].遥感学报,2013,17(5):1175-1190.Yang Bo, Wang Mi. On-orbit Geometric Calibration Method of ZY-1 02C Panchromatic Camera[J]. Journal of RemoteSensing, 2013, 17(5): 1175-1190. (in Chinese)
[8]王密,杨博.一种利用物方定位一致性的多光谱卫星影像自动精确配准方法[J].武汉大学学报,2013,38(7):765-770.WANG Mi, Yang Bo. A Registration Method Based on Object-space Positioning Consistency for Satellite Multi-spectral Image[J]. Geometrics and Information Science of Wuhan University, 2013, 38(7): 765-770. (in Chinese)
[9]胡芬.三片非共线TDICCD成像数据内视场拼接理论与算法研究[D].武汉:武汉大学,2010.HU Fen. Research on Inner FOV Stitching Theories and Algorithms for Sub-images of Three Non-collinear TDICCDChips[D]. Wuhan:Wuhan University, 2010. (in Chinese)
[10]张力,张继贤,陈向阳,等.基于有理多项式模型RFM的稀少控制SPOT-5卫星影像区域网平差[J].测绘学报,2009,38(4):302-310.ZHANG Li, ZHANG Jixian, CHEN Xiangyang, etal. Block-adjustment with SPOT-5 Imagery and Sparse GCPs Based on RFM[J]. Acta Geodaetica et Cartographica Sinica, 2009, 38(4): 302-310. (in Chinese)
[11]唐新明,张过,祝小勇,等.资源三号测绘卫星三线阵成像几何模型构建与精度初步验证[J].测绘学报,2012,41(2):191-198.TANG Xinming, ZHANG Guo, ZHU Xiaoyong, etal. Triple Linear-array Geometry Model of ZY-3 Surveying Satellite and Its Validation[J]. Acta Geodaetica et Cartographica Sinica, 2012, 41(2): 191-198. (in Chinese)
[12]张永生.高分辨率遥感测绘嵩山实验场的设计与实现[J].测绘科学技术学报,2012,29(2):79-82.ZHANG Yongsheng. Design and Implementation of Songshan Test Field for High Resolution Remote Sensing and Mapping[J].Journal of Geomatics Science and Technology, 2012, 29(2): 79-82. (in Chinese)
[13]徐文,龙小祥,喻文勇,等.“资源三号”卫星三线阵影像几何质量分析[J].航天返回与遥感,2013,33(3):55-64.XU Wen, LONG Xiaoxiang, YU Wenyong, etal. Geometric Quality Analysis of Three-line Array CCD Imagery of ZY-3Satellite[J]. Spacecraft Recovery Remote Sensing, 2013, 33(3): 55-64. (in Chinese)
[14]Bouillon A, Bernard M, Gigord P, etal. SPOT-5 HRS Geometric Performances: Using Block Adjustment as a Key Issue to Improve Quality of DEM Generation[J]. ISPRS Journal of Photogrammetry Remote Sensing, 2006, 60: 134-146.
