基于深度技术手势的图像分类方法研究
2015-09-26徐倩倩陈平平
徐倩倩,陈平平
(广州中医药大学医学信息工程学院,广州 510006)
基于深度技术手势的图像分类方法研究
徐倩倩,陈平平
(广州中医药大学医学信息工程学院,广州510006)
1 深度图像采集工具的实现
2 深度手势图像
规定6种常见的手势,如图1所示。
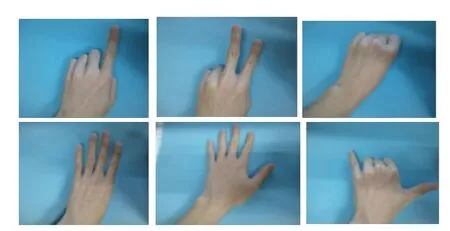
图1 6种规定手势图像
利用Kinect传感器硬件和上述的程序获取规定6种规定手势的深度图像如图2所示。
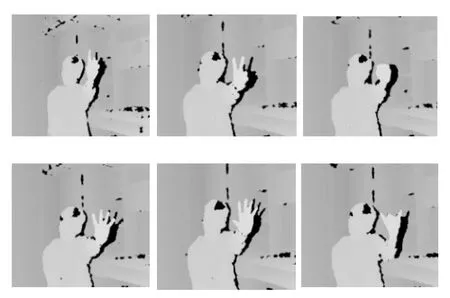
图2 深度手势图像
3 深度手势图像阈值分割
3.1阈值分割
所谓阈值分割方法就是确定某个阈值Th,根据图像中每个像素的灰度值大于或小于该阈值Th,来进行图像分割。阈值方法的数学模型如下[3]:

根据上式可知,阈值方法的核心就是阈值Th的确定方法。
3.2实验结果
以手势1深度图像进行直方图分析为例,其他手势图像以此类推。对图3进行灰度值分析,可获得如图4的灰度直方图,通过观察图3可知,深度手势图像中手势的颜色几乎接近白色,即灰度值在255附近,由图4分析可得,在灰度值255存在一波峰波谷并且区间范围较小,这个区间就是深度手势图像区域,故只要找到第一个波峰,这个波峰的灰度值就是深度手势图像的分割阈值。按照此办法,寻找图3的分割阈值为灰度值222,对图3进行阈值分割后如图5所示,由此可见阈值分割算法对于深度手势图像具有较好的分割效果。
4 深度手势图像描述与分类
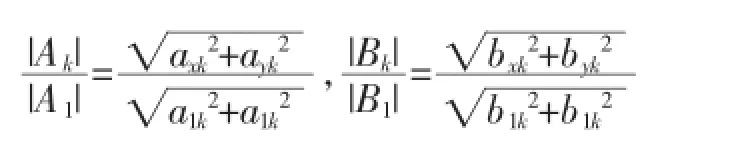
傅里叶描述符的主要思想是利用表示形状整体频率分量的一组数字来描述轮廓特征。傅里叶描述主要包括两个方面:首先,需要定义一个曲线表达式。其次利用傅里叶理论将其展开。傅里叶描述分为累加角函数和椭圆傅里叶描述等,由于椭圆描述符能保持曲线在二维空间的描述,所以本文采用椭圆傅里叶描述符对手势图像进行描述。椭圆傅里叶描述符可定义为:

其中:
分别取规定手势的深度图像各10幅,并使用MATLAB求其椭圆傅里叶描述符,然后取手势椭圆傅里叶描述符的前25数值,并求每种手势10幅图像的平均值,数据如表1所示。
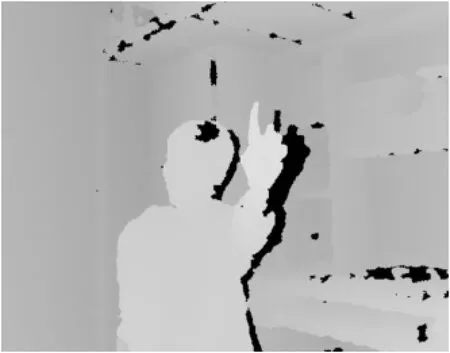
图3 深度手势1图像
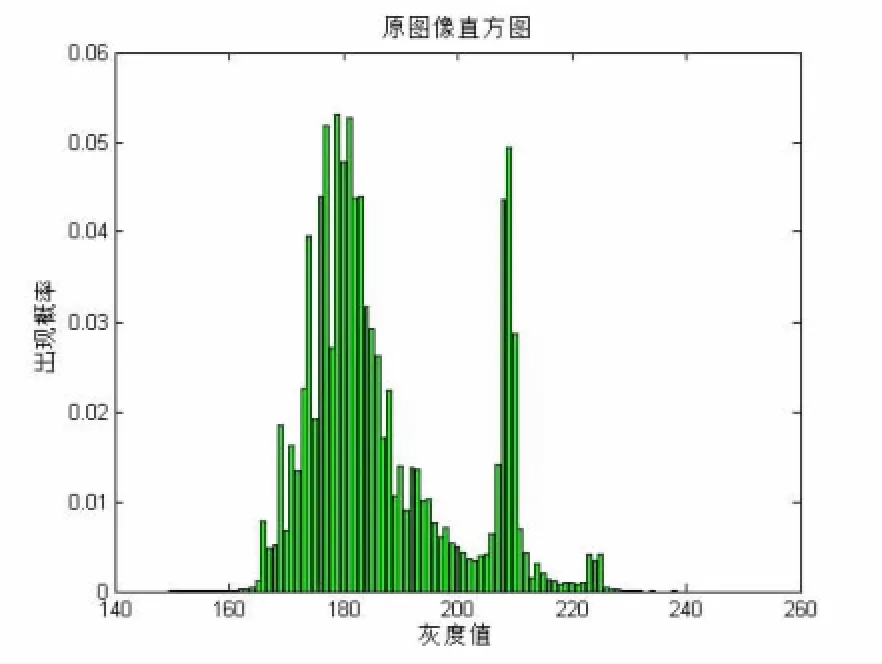
图4 深度手势1图像的直方图

图5 深度手势1图像的分割效果
以表1椭圆傅里叶描述符作为标准样品,每种手势再取5幅深度图像作为测试样品,利用欧几里得距离公式计算其相异度,作为手势分类的依据。不同手势的相异度如表2所示,相同手势的相异度如表3所示。
由结果可知,测试数据与训练数据之间的相异度越小,说明手势即可分类为那一种,例如,表3中,手势1与测试1的相异度为1.523,小于规定的量值(本文规定为2.5),即可接受为手势1,而测试5中手势1的相异度为3.689,大于2.5,不可接受,所以拒绝,即不是手势1,以此类推。
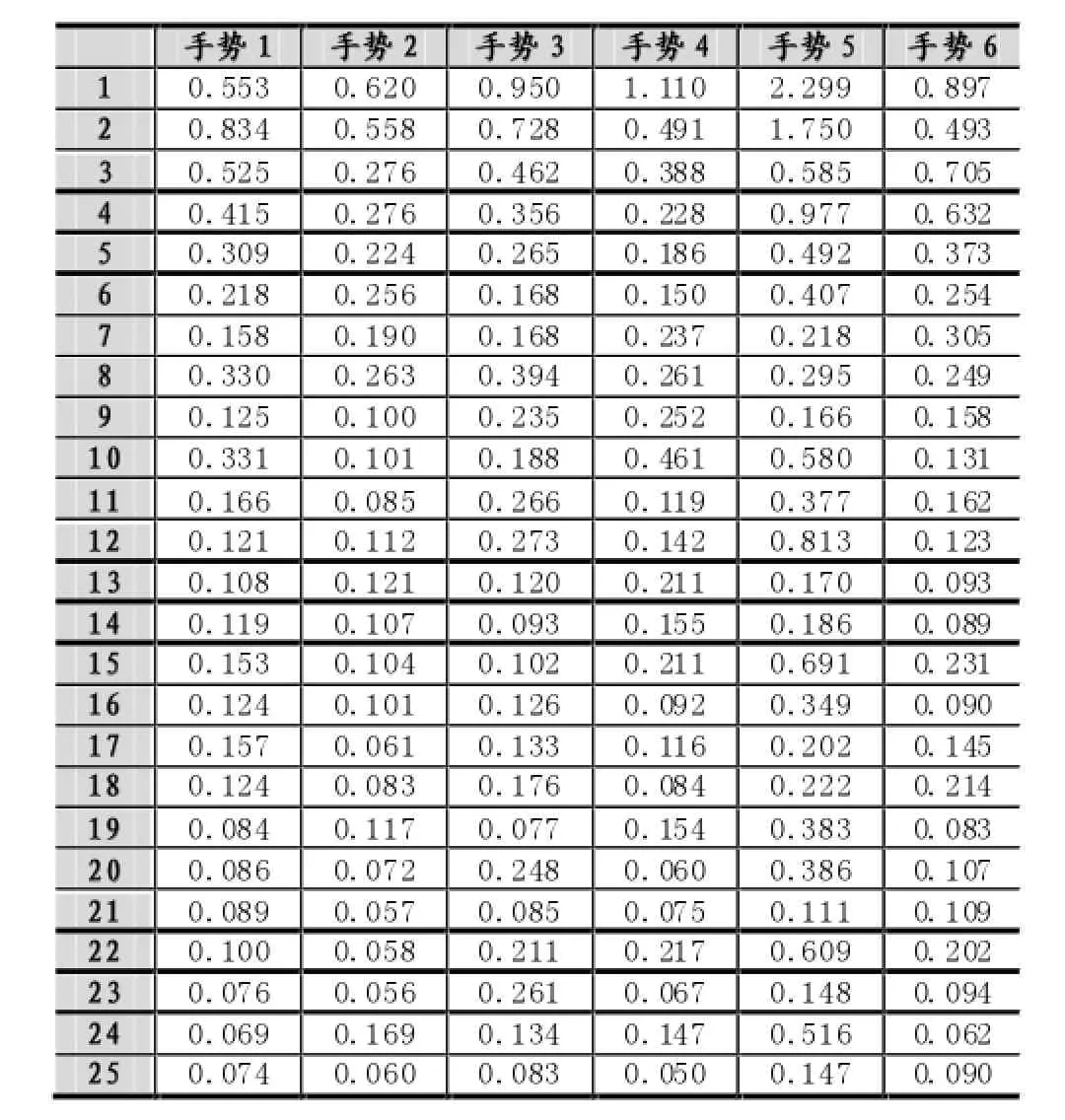
表1 6种椭圆傅里叶描述符平均后数据
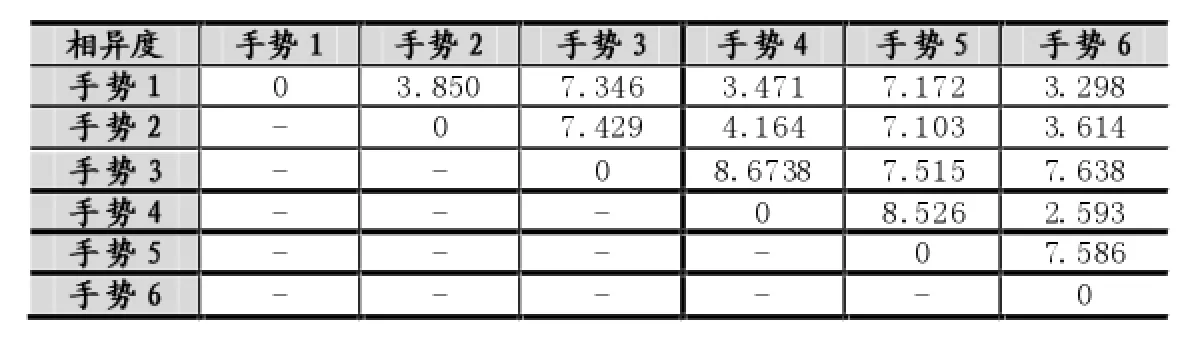
表2 不同手势的相异度

表3 相同手势的相异度
5 结论
Kinect传感器是基于视觉手势识别系统的较好的图像采集工具。而采用椭圆傅里叶描述符对处理后的深度手势图像进行描述,椭圆傅里叶描述符可以保持曲线在二维空间的描述[4]。通过计算椭圆描述符相异度的计算,椭圆描述符对于手势具有较好的分类效果。通过分析可得,不同手势图像的椭圆傅里叶描述符的差异性基本超过2.5,具有较大的差异性。而相同手势的不同图像的差异性较小。
[1]王辉.基于视觉的实时手势跟踪与识别及其在人机交互的应用:[浙江大学硕士学位论文].杭州:浙江大学计算机科学与技术工程学院,2008,3-4.
[2]Pavlovic V I,Sharma R,Huang T S.Visual interpretation of hand gestures for human-computer interaction:a review.IEEE Transactions on Pattern Analysis and Machine Intelligence,1997,19(7):677-695.
[3]江立.基于CAS-GLOVE数据手套的手势识别技术研究:[北京交通大学硕士学位论文].北京:计算机与信息技术学院,2006,12-14.
[4]莫舒.基于视觉的手势分割算法的研究:[华南理工大学硕士学位论文].广州:华南理工大学电子与信息学院,2012,5-6.
Kinect Sensor;Depth of the Images;threshold Segmentation;Elliptical Fourier Descriptors
Research on the Classification Method of Gesture Image Based on the Depth Technical
XU Qian-qian,CHEN Ping-ping
(College of Information Engineering,Guangzhou University of Chinese Medicine,510006)
1007-1423(2015)19-0020-04
10.3969/j.issn.1007-1423.2015.19.005
徐倩倩(1992-),女,安徽安庆人,硕士研究生,学生,研究方向为图形图像学、多媒体信息处理
2015-04-29
2015-06-20
利用微软的Kinect传感器采集手势图像,通过微软提供的软件开发工具包接口,将采集的手势图像转换为深度手势图像,并加强目标区域的灰度级,即手势区域的灰度值[1]。由于深度图像包含距离信息,同时又因为人在用手势示意信息时,往往会将手向前伸展,这样,手势距离Kinect传感器的摄像头更近,和人体的绝大部分不在一个平面上,也就是说手势部分灰度值将异于身体的其他部分,这样只要采用阈值分割算法就可以将手势从背景中分离出来。
Kinect传感器;深度图像;阈值分割;椭圆傅里叶描述符
国家级大学生创新创业训练计划项目(No.201310572016)
陈平平(1980-),女,广东梅州人,硕士,副教授,研究方向为计算机网络
Uses Microsoft's Kinect sensor to capture gesture image.Through the software development tools packet interface which provided by Microsoft,changes the gesture image into depth gesture image acquisition,and strengthens the gray level value of the target area.Since the depth image contains distance information,and when people express information gestures,often will stretched forward the hands,so the gesture is closer to the camera Kinect sensor,and the vast majority of the human body is not in a plane on,that gesture is different from other parts of the gray values of the body,so long as the use of threshold segmentation algorithm can be separated from the background gesture.
