人工肌肉及其在扑翼飞行技术中的应用探析
2015-09-25周皓宇张祥黄鸣阳
周皓宇 张祥 黄鸣阳
摘 要:该文简要回顾了两类人工肌肉的发展历程,介绍了近几年来国内人工肌肉的研究现状,同时,就国内人工肌肉的应用现状,探究其在微型扑翼飞行器上的技术实现,最后,分析了人工肌肉在航空航天领域的应用前景,对其研究发展方向提出了一些建议。
关键词:人工肌肉 研究 应用 扑翼
中图分类号:V276 文献标识码:A 文章编号:1674-098X(2015)07(b)-0084-02
近年来,随着人工智能研究的不断深入,对于智能机械系统的开发愈加迫切,人工肌肉正是驱动系统突破的重点。人工肌肉根据其能量来源和材料结构可分两种,第一种称为外在收缩式,其包括液压人工肌肉(hydraulic artificial muscle,HAM)和气体驱动人工肌肉(pneumatic artificial muscle,PAM),当下,研究较为广泛的是气动人工肌肉,它以支撑材料作为骨架限制变形,内部是气囊结构,通过气囊的膨胀和收缩来执行各种柔顺的动作,不仅继承了气动元件的基本优点,而且结构简单,具有高柔性和良好的仿生特征[1]。第二类内在收缩式人工肌肉,是一种对外界激励有简单响应的材料,其中研究最为广泛的是电活性聚合物(Electroactive polymers,EAP),其在电场或电流刺激下,因内部结构改变而产生变形,其形变量相比于形状记忆合金(shape memory alloy,SMA)和电活性陶瓷高1~2个数量级。同时具有柔软性好、质轻、无噪声等特点与肌肉有着极为相似的特性,甚至有部分超越肌肉的性能[2]。前者重在机械结构上的研究,后者重在智能材料的开发,二者均为人工肌肉发展的主流方向,该文主要讨论后者的研究与应用。
人工肌肉的发展推动了仿生扑翼飞行器的革新。扑翼驱动装置需具有驱动力强、重量轻、变形量大、响应速度快等特性,而传统的电机驱动明显尾大不掉。新型的人工肌肉智能材料可以在外部激励下可产生力与变形,随着进一步发展,其变形量和力的大小也将显著提高,这极大促进了扑翼飞行器性能的提升。
1 人工肌肉的发展历程
人工肌肉的研究源于早期的机器人的驱动方式的革新,原本应用于机床的零件和结构所组成的机器人暴露出明显的缺陷,大部分效率低下,难以完成柔顺动作和无隙传动。于是,许多国家纷纷开展了新型机器人驱动装置——人工肌肉的研究。早在20世纪60年代末,日本就率先开展气囊式人工肌肉的研发,并应用于二足步行机[3]。八九十年代,随着微机技术和现代控制理论的发展,协同制造工艺水平的提升,日本Bridgestone公司设计的Rubbertuator驱动器被广泛用作驱动元件,这一成果使气动人工肌肉进入了应用领域[4]。
另一方面,20世纪90年代初期,各国陆续开始研究静电驱动人工肌肉和具有收缩功能的高分子人工肌肉。比如日本工业技术院研发的新型聚乙烯醇、聚丙烯胺和聚丙烯酸的混合凝胶,遇到丙酮溶液就会收缩,浸于水中则又舒展;还有其他类型的驱动装置,如形状记忆合金、储氢合金、磁流体、光机驱动机构等,人工肌肉的研究呈现百花齐放的态势;而同期,我国仿生学的角度出发,提出一种类似生物肌肉动作的磁性橡胶人工肌肉[5],开启了我国在智能材料人工肌肉方面的研究。
2 聚合物人工肌肉的研究现状
EAP按照其驱动机理可分为电子型和离子型。电子型EAP利用电子作为电流载体,通过静电力作用使聚合物分子链重新排列发生膨胀和收缩而产生变形。其代表有电介质弹性体、液晶弹性体、压电聚合物及铁电聚合物。离子型EAP利用离子作为电流载体,施加电场促使离子移动,通过离子进入和离开的聚合物区域发生膨胀和收缩而产生变形。正在研究的离子型EAP驱动材料主要有凝胶、导电聚合物、离子聚合物—金属复合材料(ionic polymer metal composites,IPMC)、碳纳米管复合材料等。电子型EAP响应速率快、驱动应力较大,但激发电压需高达千伏,在驱动时也需要较高的外部电压(>100V),因而研究的热点转向驱动电压较低(<5V),且效率更高的离子型EAP,其中,IPMC是当下人工肌肉研究比较热门的方向。因为IPMC在同等条件下,所产生的变形和响应速率远胜于凝胶和导电聚合物,因此在人工肌肉领域受到广泛关注。近年来,随着制造工艺的显著提升,各种人工肌肉材料的研究取得突破性进展,呈现出百花齐放的态势。
2009年,Aliev等人[6]发现碳纳米管凝胶人工肌肉在高压静电、高温的条件下能达到220%的延伸率,并且在特定方向上的密度和比强度超越了钢板。
2011年,Baughman等制备了一种可以提供转动应变的人工肌肉。将碳纳米管纤维作为工作电极浸入电解质溶液中,一端连接着电极,另一端固定一只可自由旋转的桨叶。在对其施加电压时,产生扭转变形,带动桨叶旋转,撤掉电压后,桨在5s的时间回到原位。但是其必须在电解质溶液中运作,且重复性较差。
2014年,吉林大学与德州大学团队[7]合作,成功地将普通的渔线和缝纫线制备成热致伸缩的人工肌肉。相比于相同长度和质量的自然肌肉,其能够抬举重量和产生功率约高100倍左右。
2015年,Márcio D. Lima教授[8]研究出一种高性能的无需温度变化的新型人造肌肉,由螺旋碳纳米管纤维与硅橡胶组成,其最高收缩率达50%并能产生1.2 kJ每千克的能量。其传动机构是橡胶,其膨胀期间暴露在非极性溶剂之中,理论上的能量转换效率可以高达16%。
3 人工肌肉在扑翼飞行器中应用
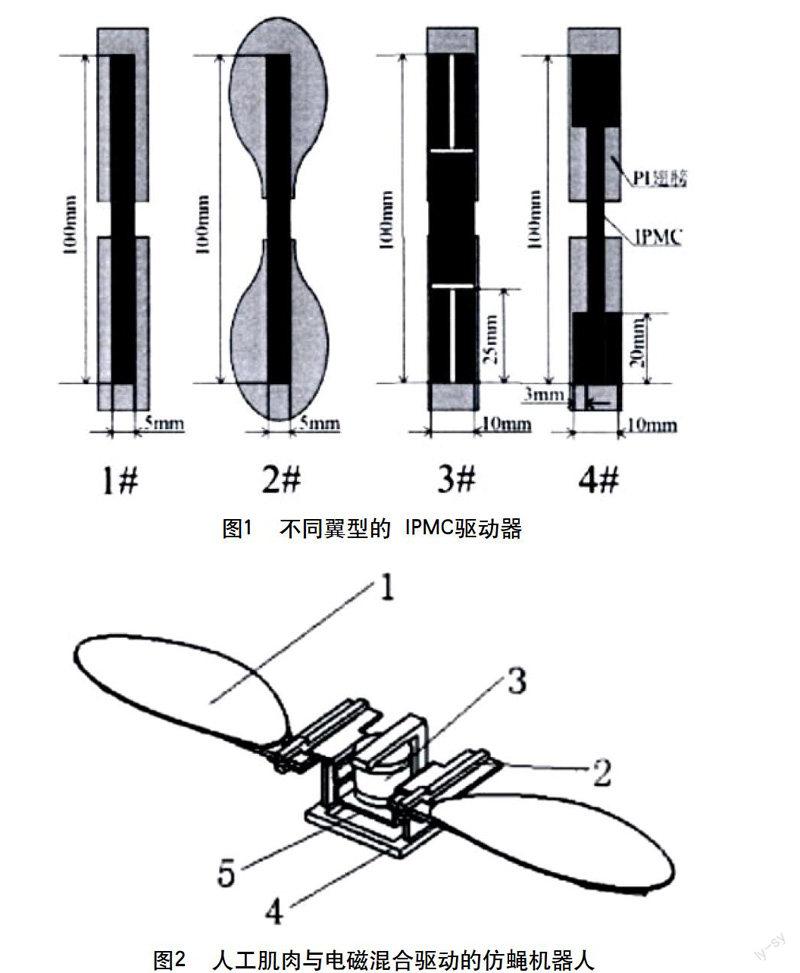
随着人工肌肉的优点越来越受到国内外重视,研究的重点逐渐由材料的制备过程向实际应用方向发展。韩国智能系统设计与控制实验室研制了初始形状为弯曲状态的IPMC致动器,并基于这种致动器研发了模拟海月水母的机器水母结构[9]。随着IPMC致动器的发展,原本发展受到阻滞的微型扑翼飞行器也重新焕发了生机,引起了国内研究热潮。厦门大学的徐兵采用还原法自行制备了镀银电极的IPMC,并研究IPMC作为翅膀驱动用于仿生驱动的可能,将IPMC附着在柔性翅膀用作朴翼驱动器,采用较小尺寸IPMC驱动较大面积的翅膀,同时采用图案化电极IPMC,成功实现了翅膀的扑动和扭转三维运动[10]。IPMC贴片如图1。
同样在扑翼方面取得较大进展还有中科院沈阳自动化研究所,据悉该所已研制一种人工肌肉与电磁混合驱动的仿蝇机器人[11],此机器人采用混合驱动的模式,成功实现了两翅膀的振动和各自转角的调整,使得机器人飞行器具备转向功能,能够实现具有三自由度飞行功能的高机动性要求。同时,此机器人的驱动电压低,控制简便,并且容易实现较大输出位移。
4 结论
目前,人工肌肉技术的研究和应用发展迅速,但还没有实现普及推广,它具有广阔的应用发展前景,但需要理论技术研究的进一步深入来支持。在航空航天领域,人工肌肉技术可应用于军事侦查的微型扑翼飞行器,而柔性机翼的研究也将推动飞行器设计的新一轮改革,综合分析人工肌肉的发展现状,给出以下建议。
(1)支持行业内研究的百花齐放,定期举办行业交流会,缔结研究联盟,分享研究经验;并广泛举办人工肌肉应用竞赛,发动各研究型高校和科技型企业参与实用推广。
(2)结合航空领域的实际需求开展针对性的应用研究,为其提供具体的系列化解决方案,以航空领域为突破口,立足并进军其他领域。
参考文献
[1]肖应锋.气动人工肌肉的研究及应用进展探析[J].机械工程师,2014(2):59-60.
[2]李晓锋,梁松苗,李艳芳,等.仿生材料电活性聚合物“人工肌肉”的研究进展[J].高分子通报,2008(8):134-135.
[3]陶国良,谢建蔚,周洪.气动人工肌肉的发展趋势与研究现状[J].机械工程学报,2009(10):75-83.
[4]Robert T. Pack,Joe L. Christopher,et al.A Rubbertuator-Based Structure-Climbing Inspection Robot.[C]//Proceedings of the IEEE International Conference on Robotics & Automation,1997.
[5]徐伟,孙序梁,何丽娟.仿生学在人工肌肉研究中的应用[J].机器人,1995(5):303-308.
[6]Aliev A E, Oh J, Kozlov M E, et al. Giant-stroke, superelastic carbon nanotube aerogel muscles[J].Science,2009(320): 1575-1578.
[7]Carter S. Haines,Márcio D. Lima,Na Li,et al.Artificial Muscles from Fishing Line and Sewing Thread[J].Science, 2014, 343(6173):868-872.
[8]Márcio D. Lima,et al.Efficient, Absorption-Powered Artificial Muscles Based on Carbon Nanotube Hybrid Yarns[J].Small (Impact Factor: 7.51),2015(3).
[9]Itelligent Systems Design & Control Laboratory.Polymer actuator[M].Korea:Mechanical Systems Engineering,2008.
[10]徐兵.基于人工肌肉的微扑翼驱动技术研究[D],厦门:厦门大学,2014.
[11]中国科学院沈阳自动化研究所.一种人工肌肉与电磁混合驱动的仿蝇机器人[P].中国:200910012338.8,2011.
