双凸极电励磁发电机系统非奇异终端滑模控制器的设计与仿真
2015-09-18戴卫力费峻涛
戴卫力,丁 骏,田 浩,费峻涛
(河海大学 物联网工程学院 江苏省输配电装备技术重点实验室,江苏 常州 213022)
0 引言
从20世纪90年代美国电机专家T.A.Lipo提出双凸极电机(DSM)[1]至今,国内外许多专家与学者对不同激磁方式与磁路结构的DSM进行了电磁特性[2-3]、发电[4]与电动控制[5]等方面的研究,并使其在飞机起动 /发电系统[6]、电动汽车驱动[7]及风力发电系统[8]等领域得到应用。在不同励磁方式的DSM中,由于电励磁和混合励磁DSM装有励磁绕组,励磁电流调节方便,非常适合作发电机使用。这类发电机用于发电系统时,无需检测发电机转子位置信号,只需外接三相整流桥即可输出直流电压[9]。同时,通过加装小功率的励磁调节器,调节励磁电流就可实现发电调压,且当发电机遇到故障时,只需关闭励磁调节器的功率开关就能实现对发电机的灭磁。
早期,双凸极发电系统中的励磁调节器采用的是单输出电压反馈控制,并不能使发电机获得良好的动态性能。后来,有学者提出在输出电压反馈控制的基础上增加励磁电流前馈补偿环节(简称为VFECF控制)对输出电压进行补偿,在双凸极电励磁发电机(DSEG)和双凸极混合励磁发电机[10](DSHEG)电压调节系统中取得了较好的效果,改善了发电机性能。与此同时,文献[11]还提出了在单输出电压反馈环的基础上增加负载电流前馈进行补偿(简称为LCFC控制),以此有效降低发电机在瞬态过程中的输出电压波动;此后,文献[12]又在LCFC控制的基础上引入了非线性的PI调节控制,改善了发电机的动态性能。随后,又有学者提出了由发电机输出电压、励磁电流、电压频率以及负载电流构成的多路闭环反馈控制调压系统[13],尽管这种控制策略能有效地改善发电机的动态性能,但控制元件和参数的选取变得极为复杂。
近年来,非线性控制理论极大地促进了发电机控制领域的发展。特别是滑模变结构控制,由于具有强鲁棒性、快速响应及良好的环境适应性等优点而在直流电机[14]、异步感应电机[15]、双馈感应发电机[16]、永磁同步电机[17-18]及开关磁阻电机[19]的控制和状态观测器[20]中得到了广泛应用。本文基于DSEG调压系统,提出了固定开关频率的非奇异终端滑模(NTSM)控制励磁调压器,实现了励磁电流的快速调节,提高了系统的稳定性和动态响应。文中基于DSEG数学模型和李雅普诺夫稳定性方程,建立了调压器的开关滑模轨迹方程,详细讲述了其工作原理,并给出了滑模系数的选取原则和控制律的实现方法。最后,基于有限元分析建立了发电系统的“场-路”联合仿真模型,进行了NTSM调压控制下的稳态和动态性能仿真,验证了理论分析的正确性和可行性。
1 DSEG调压控制系统
图1所示DSEG调压系统由DSEG、三相整流桥和励磁调节器三部分组成。其中,三相整流桥与DSEG三相绕组相连,将发电机交流电压整成直流电压;而励磁调节器中,VT1和VT2为MOSFET或IGBT等全控型功率器件。正常情况下,VT1导通,VT2采用PWM控制以调节励磁电流,从而实现发电调压。
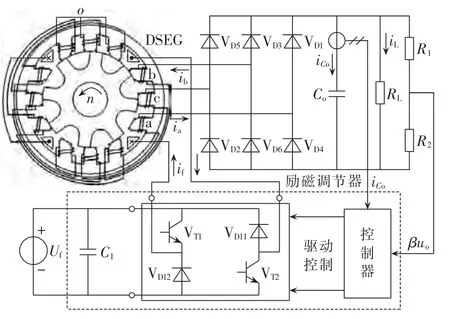
图1 DSEG调压系统Fig.1 Voltage regulation system of DSEG
1.1 DSEG
图1所示12/8极DSEG的定、转子均为凸极结构,定、转子极弧相等。每个定子齿上都装有集中绕组,且每隔90°机械角的定子绕组相互串联构成一相;转子上无绕组,无铜损。电机a、b、c三相绕组见图中定义。图示“×”代表励磁电流流入;“·”代表励磁电流流出。相应的电机结构与电气参数如下:定子外径为172 mm,转子外径为110.9 mm,定子内径为111.4 mm,转子内径为40 mm,定子轭高为10.7 mm,转子轭高为16.2 mm,定子齿高为19.6 mm,转子齿高为19.25 mm,定子极弧为15°,转子极弧为 15°,定、转子硅钢材料选用1J22,电机轴长为60 mm,输出直流电压为28.5 V,额定负载电流为200 A,励磁绕组串联匝数为60×4,每相绕组串联匝数为2×4。
当DSEG相绕组有电流流过时,a、b、c各相绕组和励磁绕组中会产生磁链,可表示为:

电机相绕组中的磁链与电机转子位置和绕组电流大小有关。当转子位置和绕组电流发生变化时,相磁链就会发生变化,产生感生电动势,可表示为:

由上式可看出,感生电动势由两部分组成,分别为电机转子位置所决定的旋转电动势(也称相电势)和由电流变化引起的变压器电动势。
发电机各绕组端电压可表示为:

其中,e= [ea,eb,ec,ef]T,为 a、b、c 各相绕组和励磁绕 组的电 势;I= [ia,ib,ic,if]T,为发 电机 各绕 组相电流;u= [ua,ub,uc,uf]T,为发电机各绕组端电压;L=,分别为DSEG各绕组的自感和互感构成的电感矩阵和发电机各相绕组电阻构成的电阻矩阵。
1.2 电压调节器
励磁电压调节器由励磁变换器和控制器构成。图1所示励磁变换器由2个功率开关管和2个续流二极管构成。其中,功率管VT1在正常工作时处于导通状态,而功率管VT2为PWM控制。当发电机出现故障导致发电机输出电压突变时,同时关闭功率管VT1与VT2,可使励磁电流急剧下降,从而使发电机实现灭磁。图中控制器可为数字控制也可为模拟控制。采用数字控制器可通过程序产生相应的功率管驱动信号,实现既定的调压控制策略。
2 NTSM控制工作原理
为便于对NTSM控制的调压原理进行阐述并设定滑模控制律,可做如下假设:DSEG工作在发电模式,且此时VD1和VD6处于导通状态,如图1所示。则输出电压误差x1、电压误差的微分x2可表示为:

其中,Ur为参考电压;uo为发电机输出电压;β为输出电压比例系数;ia为流过a相绕组的电流;iCo为流经滤波电容的电流;RL为负载电阻阻值。
根据图1所示电路工作模态,忽略电阻压降,则可得如下方程:
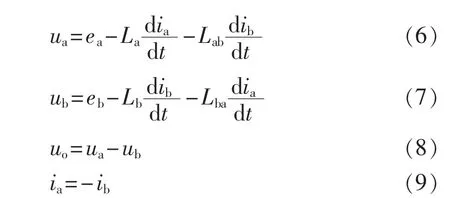
由式(6)—(9),并考虑 Lab=Lba可得:

其中,eab为发电机a、b相绕组间的线电势。
对式(10)进行积分,可得电流 ia:

将式(11)代入式(5),可得:

对式(4)、(12)分别求导,可得:
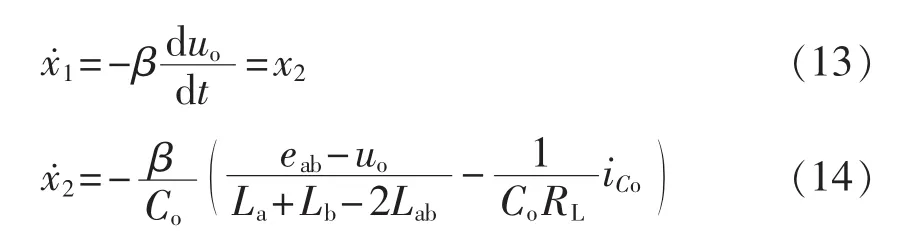
由式(13)、(14),可得如下状态方程组:

其中,L=La+Lb-2Lab;u为调压器功率开关管VT2的控制律。
假设二阶不确定非线性动态系统由下式表示:

其中,x=[x1,x2]T;b(x)≠0;g(x)代表不确定性及外部干扰。
若设计如下NTSM面:

其中,α为滑模系数,一般α>0。
根据此NTSM面,可设计如下控制律:

若系统稳定,由李雅普诺夫稳定性条件,有:


将式(18)代入式(20)中,可以得到:

因而有:

通过式(22)可以看出,只要系数K>0,系统就能满足李雅普诺夫方程的稳定性条件,即系统稳定。
对比式(15)与(16),可得:
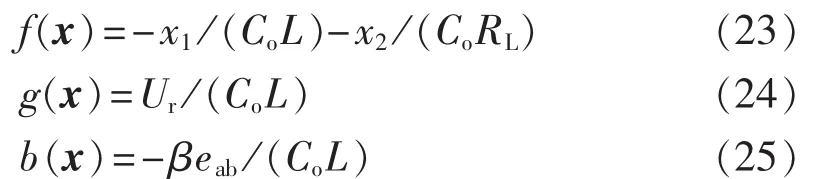
将式(23)—(25)代入式(18)中,即可得到控制律:

其中,需要注意的是系数K>0。
3 系统仿真建模与结果
为验证上述滑模控制理论分析的正确性,可在图2所示DSEG有限元分析模型的基础上,通过增加发电机主功率电路、电压调节器和相应的控制逻辑电路,建立如图3所示的DSEG发电调压系统“场-路”联合仿真模型。
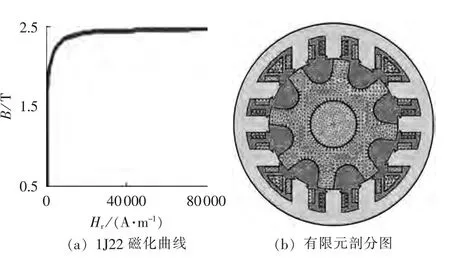
图2 DSEG有限元模型Fig.2 Finite element model of DSEG
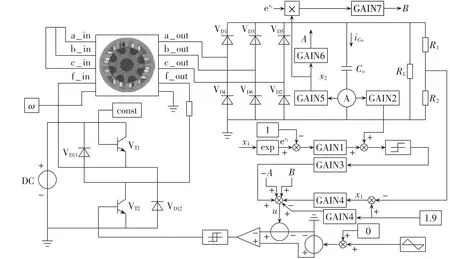
图3 基于NTSM控制的“场-路”联合仿真模型Fig.3 Field-circuit co-simulation system based on NTSM
考虑到实际发电系统参数(电感L=50 μH,滤波电容 Co=40 mF,滑模系数 α=1 000,β =0.067,eab=28.5 V,K=95000,满载时的负载电阻为 0.14 Ω),且在建立仿真系统时VT2的PWM驱动信号由控制律u与三角载波交截而成。因而,在建模时,控制律的构建和参数选取是整个仿真系统的关键。
如图3所示,控制律u可由以下方式计算得到。若设置参考电压Ur=1.9 V,则输出电压比例系数β=1.9/28.5=0.067。 由滤波电容 Co=40 mF,可得 β/Co=0.067/0.04=1.7。在实际仿真系统中,为计算方便,选取该值为2.5,则状态变量x2就可按式(5)实时计算得到。考虑到电容充放电电流较大,因而x2计算值较大,不利于与三角载波交截。而对于S,只需关心它的正、负。因此,可对系数进行缩放处理,将S缩小至原值的1/1000。则可得到图3中的GAIN1为1,GAIN2为0.0025。控制律u表达式第一部分的系数为 1/(βeab),按实际发电系统参数,得 1/(βeab)≈0.5。考虑到该系数功用相当于传统PI控制系数中的比例系数,则增大增益,有助于减小系统的静差,因而可适当放大系数1/(βeab)。将其放大10倍后,可以得到GAIN4的增益为5。随后,可以计算控制律的第二部分系数L/(βeabRL),依据实际发电系统参数,可计算得 L/(βeabRL)=0.00019(实际取值 0.00025)。 控制律第三部分系数 Ur/(βeab)=1,为恒值。 x2ex1的系数 αCoL/(βeab)=0.001。若考虑到 K=95000,则可计算得控制律的最后一部分系数 KCoL/(βeab)=0.1。这样就可计算出控制律的值,然后与三角形载波相交截,从而得到功率管VT2的PWM驱动信号。
为使控制律u被严格限制在三角载波的上、下限内,可使u的系数均放大10倍,则相应的系数见表1。
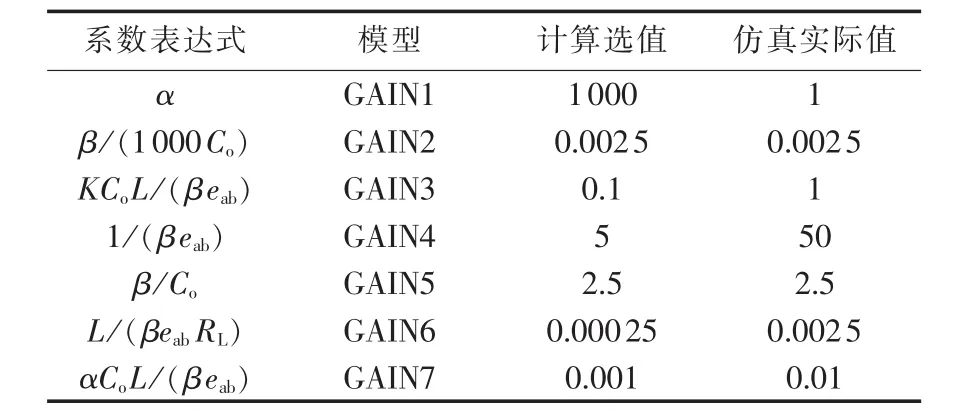
表1 仿真系统中系数取值Table 1 Coefficients of simulation system
3.1 稳态调压仿真
基于上述“场-路”联合仿真系统模型,对NTSM控制励磁调节器进行了发电系统的稳态调压仿真,并与VFECF控制下的仿真结果进行了对比。图4给出了不同控制策略下的外特性曲线。由图可知:由于参数计算时以发电机满载为基准,因而NTSM控制下,负载200 A时的输出电压为28.5 V,而轻载时输出电压稍高于额定电压。外特性曲线表明NTSM控制获得了与VFECF控制同样优良的静特性。
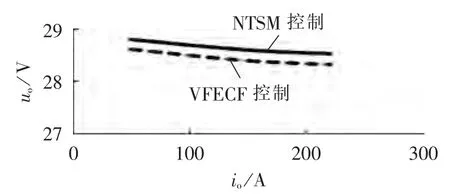
图4 不同控制策略下的发电机外特性(n=4200 r/min)Fig.4 External characteristic of DSEG for different control strategies(n=4200 r/min)
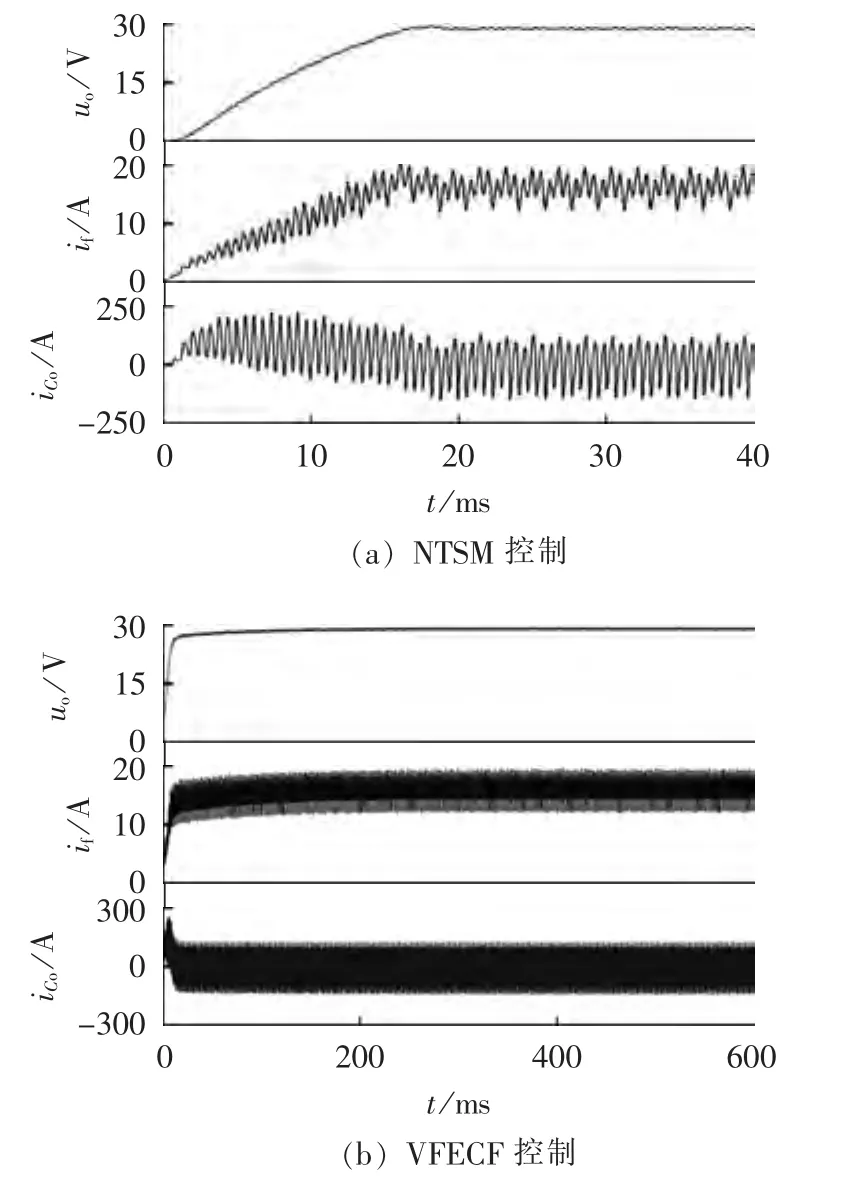
图5 发电机稳态运行波形(n=4200 r/min,io=250 A)Fig.5 Steady-state waveforms of DSEG(n=4200 r/min,io=250 A)
图5给出了NTSM和VFECF控制下轻微过载时的稳态发电波形。从图中可看出:NTSM控制下的电压调节系统输出响应很快,仅20 ms就已进入稳态,且输出几乎无超调;而VFECF控制下,输出电压进入稳态则近150 ms,远大于NTSM控制。2种控制下的发电机输出电压纹波均很小,约为0.8 V。
3.2 动态调压仿真
发电机调压系统除了应具有较高的稳压精度和良好的电压静特性(即外特性要硬)外,还需有优良的动态性能。
图6给出了不同控制策略下的发电机输出动态电压和励磁电流波形,相应的动态测试数据见表2。从图6和表2可看出:NTSM控制下的发电机动态性能要远好于VFECF控制,不仅恢复时间只有VFECF控制的1/20,而且负载变化前后的输出电压变化也比VFECF控制要小。
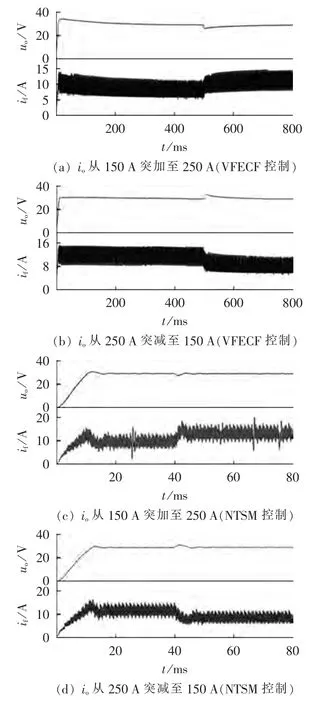
图6 不同控制策略下的发电机动态波形(n=6000 r/min)Fig.6 Dynamic waveforms of DSEG for different control strategies(n=6000 r/min)
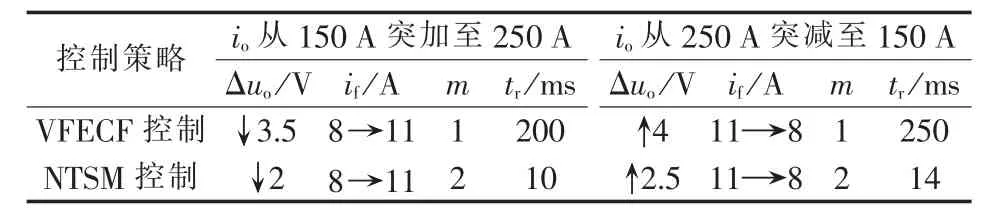
表2 发电机动态调压测试数据(n=6000 r/min)Table 2 Dynamic test data of DSEG(n=6000 r/min)
4 结论
本文针对DSEG发电调压系统,提出了一种新型固定频率PWM型NTSM控制器,用于发电机的励磁电流调节,以实现优良的调压性能。本文在建立DSEG数学模型和分析NTSM控制调压原理的基础上,结合李雅普诺夫稳定性条件,详细地推导了滑模系数的选取范围和控制律系数的计算方法。最后,基于有限元分析模型,建立了基于NTSM控制的DSEG发电调压系统“场-路”联合仿真模型,对发电系统的稳态和动态性能进行了仿真测试,验证了NTSM控制理论的正确性和方案的可行性。其仿真结果与VFECF控制相比:基于NTSM控制的DSEG发电调压系统在获得优于VFECF控制的稳态性能的同时,还获得了远优于VFECF控制的动态性能,具有调节时间短、静压差和纹波小,以及动态恢复时间快、动态输出电压变化小等优点。
