力感知系统的研究综述
2015-09-12豆勤勤
摘要:文章介绍了力觉感知系统的结构原理,对力觉感知系统的驱动结构、新型材料磁流变液以及当前力觉反馈设备进行了综述,提出了一种新型的基于磁流变液装置的力觉感知系统结构。该新型结构型式相对简单,几乎无磨损,器件寿命长、所用材料来源丰富、价格低廉,有良好的工程应用前景。
关键词:力感知;磁流变液;力觉反馈设备;遥控机器人;传感器 文献标识码:A
中图分类号:TP393 文章编号:1009-2374(2015)34-0002-03 DOI:10.13535/j.cnki.11-4406/n.2015.34.002
1 概述
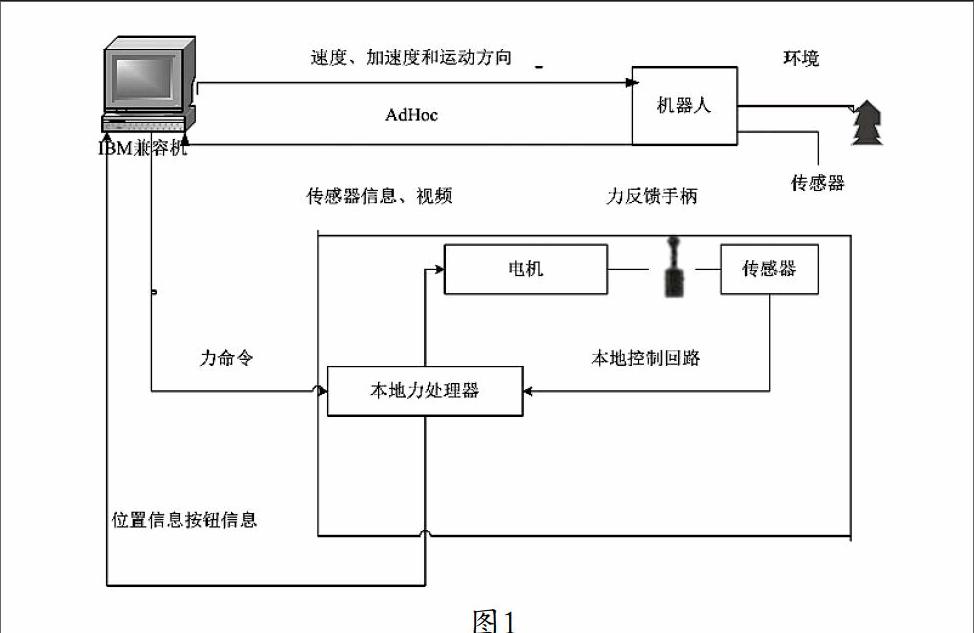
在遥控机器人工作系统中,操作者一般是通过机器人本身携带的传感器来获取并感知远端机器人的工作信息。目前采用的手段主要有视觉和触觉传感。其中触觉传感与反馈同时发生,精确度较高,实时性较强。而力觉又是触觉中较复杂的一种感知。力觉反馈是指上位机对操作者输入的信号进行作用,并通过力觉反馈设备反作用于操作者的过程。在此过程中,力觉反馈设备利用机器人传感器测量操作者的运动信息,并将数据准确地反馈给上位机,上位机根据力觉生成算法自动生成力觉反馈设备的控制信号,分别传输给显示设备和力觉反馈设备,并将远端作业环境中生成的力感反馈给操作者,使操作者产生身临其境的力觉临场感(如图1所示)。力觉反馈设备是机器人遥控工作系统中对力觉信息感知的关键部件,是操作者感知机器人工作环境并对其进行控制的重要媒介,具有人机接口的作用。
图1
力觉信息主要通过反馈设备的驱动机构提供给操作者,因此,如何有效地提供力觉反馈和位置控制精度是力觉临场感知系统研究的关键。力觉反馈设备由于工作环境的关系应该具备结构简单和紧凑、操作灵活轻便、摩擦和惯性小等特点,并且能够提供合适的操作空间和出力,符合动力学特性,具有通用性。理想的力觉临场感能使操作者感知的力等于从手与环境间的作用力,同时从手的位置能够准确地再现主手的标定位置,此时的力反馈控制系统称为完全透明的。
2 力觉反馈设备驱动方式研究现状
目前的力觉反馈设备主要采用电动、液压、气动等型式的驱动方式,还有其他新型功能材料,如形状记忆合金机构、压电晶体驱动机构、电致和磁致伸缩驱动机构以及气动肌肉驱动机构等构成的新型驱动机构。
直流力矩电机具有反应速度快、转速波动小、低速稳定、可以直接带负载的特点,并且机械特性和控制特性线性度好,能够在长期运转或低速运行时产生足够大的转矩。这些特点使得它能够用在位置伺服或低速伺服系统中作为执行元件。但是直流电机施加到力反馈手柄上力是经过一级齿轮减速器减速增力,再通过连杆机构进一步地增力并变换力的方向完成的,这种结构由于存在齿轮机构和连杆机构的机械磨损,增大了力觉反馈误差,从而影响了位置控制的精度。
气压传动的驱动方式具有柔性、安全、重量轻等特点,并且比较清洁,不会污染环境,适合制作成便携式的操纵器。但是气体具有可压缩性,并且气体通过阀口流量具有非线性,气缸本身存在摩擦力,因此气动系统属于非线性系统,很难实现精确的位置控制。现实中用得最多的是采用控制脉冲宽度的脉宽调制,但这种方式噪声大,存在稳态波纹、阀的寿命较短等缺点。
液压传动具有功率密度大、响应快等特点,能够实现精确的位置和力控制,需要有一套专门的泵站,并且为了减少泄漏,液压元件在制造精度上要求较高,造价较贵,更重要的是液压油存在可压缩性和泄露、摩擦等缺点,液压传动时的传动比不能够保证严格,因此在工作时会有较大的能量损失,同时油温的变化、油液的污染也对液压传动的工作稳定性影响比较明显。
形状记忆合金机构作为一种驱动方式,做成电驱动器,可以代替电磁螺线管以及伺服马达、液压、气动装置。与其他的驱动方式比较,形状记忆合金机构的电驱动器结构设计简单、紧凑,没有噪音,并且成本较低。但是容易疲劳失效,尽管能够快速加热实现驱动,冷却过程较长,对使用的环境温度要求较严格,一般不要超过100℃。到目前为止很少有实用化的高温形状合金材料可供选择使用。利用磁流变阻尼器作为半主动控制中的驱动机构,能够实现快速并高效的状态切换,并且只需消耗少量控制能量;磁流变阻尼器的结构相对于其他驱动装置较简单,所用材料来源丰富、价格较低,工程应用前景较好。
3 磁流变液的研究现状
磁流变液是一种磁性胶体溶液,由表面活性剂包覆磁性微粒,并且高度分散在基液中形成。即使有重力场和内部磁力的作用,这种溶液也不会出现凝聚和沉淀现象。加上外磁场后通常被磁化,显示出超顺磁性;去掉外加磁场后,又能够恢复到原来杂乱无章的无序状态,消失掉宏观特性。此种液体不仅具有固体的磁性,而且还有液体的流动性,作为一种新型的功能材料,在很多领域有着广泛的应用。
磁性液体在20世纪60年代初由美国宇航局研究开发,是为了解决宇宙服可动部分的密封及如何在空间失重条件下进行燃料的补充等问题。世界上第一个具有实用意义的制备磁性液体的专利是由S.S.Pappell在1965年获得的。在磁性液体出现以后几年内,就开始被应用在科学实验以及工艺装置中了。此后,各国纷纷开展对磁性液体技术的研究,如日本、前苏联、英国等。我国起步较晚,在20世纪70年代末期才开始对磁性液体及相关应用展开研究。
磁性液体不仅有固体的磁性,还有液体的流动性。作为一种新型的功能材料,具有多种特殊性质,如黏度特性、力学特性、光学特性、声学特性及温度特性,同时具有较大的屈服应力(可达50~100kPa),对污染不敏感,且一般采用12~24V低压电源,工作温度范围较宽(可达-40℃~150℃),因此在诸多领域有着广泛的应用。
从20世纪80年代中期开始,对磁流变液及相关理论和应用开始广泛起来。其中美国的Lord公司和Notre Dame大学对磁流变装置进行了大量的研究和应用。其他国家如德国、法国、俄罗斯和日本等也投入了大量的资金和科研对磁流变等智能材料和装置进行研究,以便应用在军用和民用等领域产品。磁流变阻尼器的各种动力模型结构也已经建立了起来。近年来大量涌现出应用磁流变液做成的各种阻尼器、制动器、离合器、抛光装置、液压阀、密封装置、复合构件、柔性夹具、健身器、人造关节等方面的产品。
4 力觉反馈设备研究现状
能够把力觉反馈给用户的反馈感知硬件即是力觉反馈设备。目前的力觉反馈设备从可携带性看分为桌面式反馈设备和可穿戴式反馈设备两类。
桌面式反馈设备是由操作者操作其控制末端,反馈设备根据检测到的末端点的位置来计算应出的力,操作者经过驱动装置来感知力的大小,这种设备一般是固定在桌面或地面上。目前应用得最多的是由美国SensAble公司生产的“PHANTOM”(Personal Haptic Interface Mechanism)力/触觉反馈设备。此设备包含一个末端带有铁笔的力反馈臂,作为其主要部件,能够实现六自由度运动,其中3个是活跃的,可以提供平移力反馈。PHANTOM具有三轴准运动解耦以及重力自平衡等特性,并且有良好的静态特性、较高的动态响应能力,但是产生的反馈力较小。由日本Okayama大学的则次俊朗教授研究的气动并联机构可以实现力觉再现,并且这种结构承载能力较大、位置控制精度高、动力学特性好、反解容易,但是其工作空间较小,正解困难,存在奇异位形。
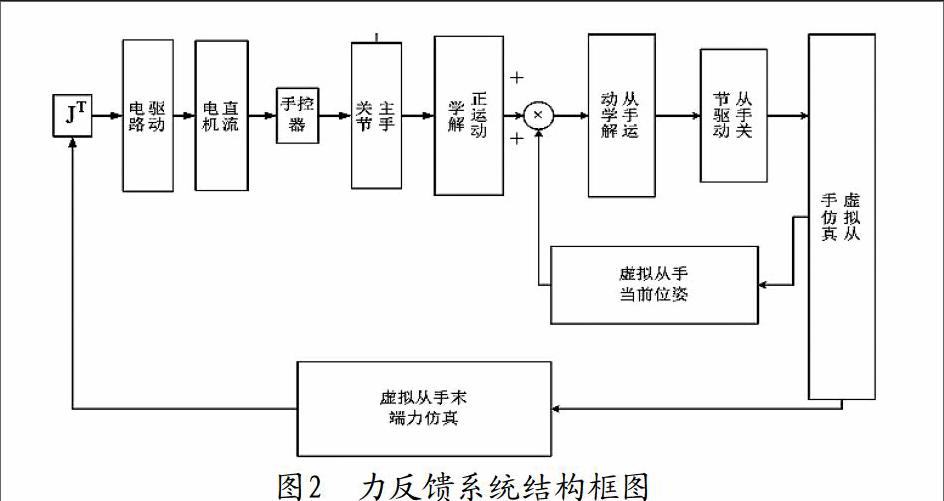
可穿戴式反馈设备一般是需要佩戴在手上或手臂上的反馈设备,主要有电机驱动(系统结构框图如图2所示)、液压驱动、气压驱动、磁力驱动和电流变体驱动等驱动形式。Virtual Technologies公司开发的Cybergrasp是一款商用力反馈数据手套,它是在Cyber-Glove的基础上进行研发的,由伺服电机进行驱动,外骨架机构由钢丝绳传递力,最大可以提供16N的阻尼力在手指上。但是其重量较大,用户长时间佩戴以后会感到疲劳。与之相似的还有Hashmioto设计的力反馈数据手套和Bouzit设计的由力矩电机进行驱动的LRP数据手套。
图2 力反馈系统结构框图
利用气动肌肉实现力觉再现由捷克的Lukas Kopecny进行研发。气动肌肉通过控制压力来产生横向力,其一端固定在支架上,另一端固定在套管上,并戴在手指上的。由美国Rutger大学的Burdea研发的Rutger Master Glove是一种内置式多指力反馈数据手套。该手套能够连续产生16N的阻尼力在每个手指上,并且摩擦较小,但是手指的运动空间会受到一定的限制。另外,还有日本的HOSEI大学田中实验室研制的Fluid PowerGlove,它也是一种驱动器内置式的数据手套。
美国南曼瑟迪斯特大学机械工程系研究的PHI系统可以在手臂上实现力反馈,相当于遥操作中的主手,能够跟踪肩和肘的运动,其中由3个正交放置的气缸来实现肩部的球关节,由1个气缸实现完成肘部关节。英国Salford大学设计的由气动人工肌肉驱动的七自由度外骨架式力觉再现装置,可以正确地复现接触力,其中肩部有3个自由度,肘部和腕部分别有2个自由度。
在GAS-Glove基础上,由中科院研制的点式力觉反馈系统,采用的是比例电磁铁驱动外骨架式力反馈装置,能够在给用户的指端施加阻尼力的同时,约束手指局部关节的运动,一定程度上防止了虚拟手嵌入虚拟物体中。同时,东南大学和哈尔滨工业大学SMC气动技术中心分别对力觉数据手套进行了深入的研究。
5 结语
大部分已开发的力/触觉反馈设备的重量和体积都比较大,用户长时间使用这样的设备会感觉到非常疲劳。采用磁流变驱动器可以起到传统机构中传感、驱动和传递三系统功能的作用。这种设计上的简化以及磁流变阻尼器件没有转动滑轮和齿轮的事实,使得产品的超小型化和集成化成为可能,在消耗少量控制能量的情况下,能够实现快速、高效的状态切换;并且磁流变阻尼器结构型式相对简单,具有电控机械器件的能力,几乎无磨损,器件寿命长、所用材料来源丰富、价格低廉,有良好的工程应用前景。
参考文献
[1] 马来贻,尹衍升.磁性液体的研究现状[J].四川化工,2005,8(3).
[2] 杨文珍,高曙明,万华根,朱振华,骆阳.基于物理的虚拟手交互碰撞力觉生成和反馈[J].计算机学报,2006,29(12).
[3] 杨文珍,高曙明,万华根,朱振华,骆阳.基于物理的虚拟手抓持力觉生成和反馈[J].计算机学报,2005,28(6).
[4] BaoGang,Sun Zhongsheng,Wang Zuwen.Force Feedback Data-glove Based on Pneumatic Artificial Muscles[J].Chinese Journal of Mechanical Engineering,2006,19(4).
[5] C.S.Tzafestas.Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation[J].IEEE Transactions on Systems,Man and Cybernetics:Part A:Systems and Humans,2003,33(1).
[6] L Kopecny.Producing of Tactile Feedback via Pneumatic Muscles[E/B].IEEE International Conference on Industrial Technology,2003.
[7] 戴金桥,王爱民.基于数据手套的力觉再现装置的设计[J].传感技术学报,2004,(3).
[8] 刘斌,李爱群.磁流变阻尼器及其研究进展[J].常州工学院学报,2005,(18).
基金项目:安徽省科技厅自然科学基金(项目编号:KJ2013B039)。
作者简介:豆勤勤(1985-),女,河南周口人,安徽工业大学工商学院电气信息系讲师,硕士,研究方向:智能机器人。
(责任编辑:周 琼)
