大气紊流对运输机颠簸影响分析
2015-09-12徐彦军
徐彦军,王 瑞
(海军航空兵学院飞行理论系,辽宁 葫芦岛 125001)
运输机在中、高空遇大气扰动,就会引起颠簸。当大气扰动强烈、飞行员处置不当时,颠簸会加剧甚至危及飞行安全。此种情况应该引起有关人员的关注。某支线运输飞机的巡航飞行高度属于大气紊流较强的区间,本文以此型飞机为例,对于一定大气紊流条件下飞机的响应情况进行数值仿真分析,以帮助飞行员对于颠簸飞行有更为清晰的认识。
1 大气紊流引起的飞机颠簸
不规则的扰动气流(大气紊流)是形成飞机颠簸的主要原因。飞机在飞行中,由于遇到了时大时小的上升、下降气流或水平气流对飞机的冲击,使飞机的升力发生不规则的变化,从而造成飞机的颠簸、摇摆、以及局部抖动等现象,这就是飞机颠簸。
虽然颠簸时的飞行状态有着种种变化,但是多数飞行员主要是依据垂直方向上颠簸的剧烈程度来估计颠簸强度的。因此,飞机的法向过载n的均方差是衡量颠簸强度的重要参数。大量的统计及实验数据表明:当σn=0.2时,飞行员会感到操纵飞机不舒服;当σn=0.5时,则操纵飞机已相当困难。一般规定,σn=0.2是弱颠簸与中度颠簸的分界,σn=0.5是中、强颠簸的分界线,σn=1时,则为极强颠簸。
2 大气紊流条件下的数值仿真分析
2.1 仿真模型的建立
飞机的运动方程采用建立在航迹轴系的纵向小扰动方程[1],将其写成标准的矩阵形式为

式(1)中:状态向量x=[ΔV Δα Δq Δθ],分别为飞行速度、迎角、俯仰角速度和俯仰角的变化量;输出向量y=[Δh Δn Δq Δθ],分别为高度 、法向过载、俯仰角速度和俯仰角的变化量;控制向量u=[δeuWwW],分别代表升降舵偏转角、切向和法向的风速分量;A,B,C和 D为常值矩阵。
飞机的基准运动为在一定高度的等速平飞,紊流飞行中假设飞行员不实施操纵,当考虑飞机自动驾驶仪影响时,飞机的纵向飞控系统方框图如图1所示。
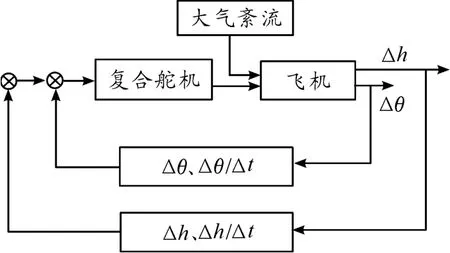
图1 飞机的纵向飞控系统方框图
图1中的大气紊流为Dryden模型[2],是用白噪声生成器信号经转化而形成的。紊流强度是超越概率的函数。本算例采用的紊流强度为σw=3 m/s,σw为紊流速度的均方差,其超越概率为10-3,这表明飞行中遇到这样紊流强度情况是可能的。反馈通道的参数包括俯仰角、俯仰角速度、高度差和高度变化量。
图2、图3分别为大气紊流模型的切向和法向速度在紊流区内的变化情况,由于高空大气的各向同性假设,沿飞行速度方向紊流的统计数据与法向是一样的。
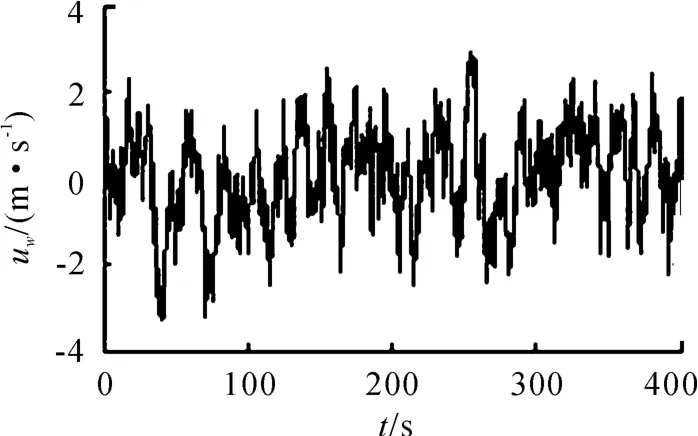
图2 水平大气紊流
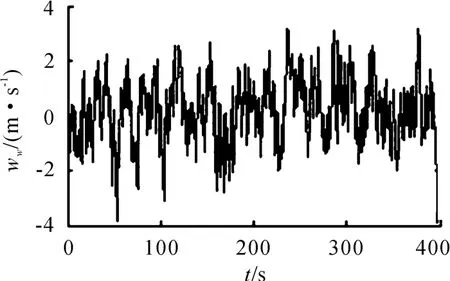
图3 垂直大气紊流
2.2 计算分析
下面利用上述仿真模型针对自动驾驶仪开通和断开两种情况进行数字仿真计算,分析紊流引起颠簸后飞机两个最关键的参数,过载和高度的变化。飞行高度3000 m,飞行真速400 km/h时飞机经历40 km紊流区。
图4为接通纵向自动驾驶仪回路时飞机的法向过载响应。图5为断开纵向自动驾驶仪回路时飞机的法向过载响应。在此紊流强度和飞行速度下,飞机在紊流中基本处于轻度颠簸状态。
利用公式

计算图4、图5两种情况法向过载的均方差σn,结果是与断开自动驾驶仪相比,自动驾驶仪接通会使法向过载的均方差σn增加21%。
运输类飞机大多在亚音速范围飞行,具有良好的操、稳特性,因此,一般并不加装增稳系统,其加装的自动驾驶仪具有航迹保持和姿态保持的功能。由于没有迎角(过载)反馈,自动驾驶仪的开通并没有使飞机的稳定性得到增强,飞机受到风(特别是垂直风)扰动时,其自身保持迎角(过载)的能力也没有加强,因此,其法向过载的均方差不会减小。如果飞机遇到的紊流强度比较弱,利用自动驾驶仪飞行员可以很容易地在紊流前后保持飞机的航迹和姿态。但如果遇到强烈的颠簸,考虑自动驾驶仪对飞机的颠簸并没有明显的抑制作用,并且考虑到大气紊流频率范围的不规则性,为了避免造成危险过载,必须断开自动驾驶仪。这里强调一点,对于带有自动增稳功能的现代高速作战飞机来讲,其自动增稳系统对于大气紊流具有明显的抑制作用。
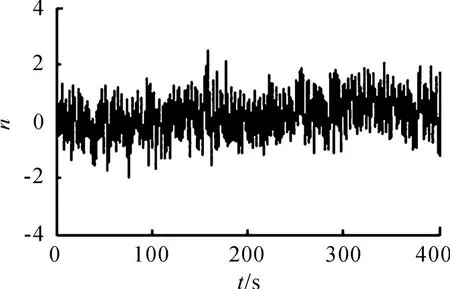
图4 自动驾驶仪开通时的过载
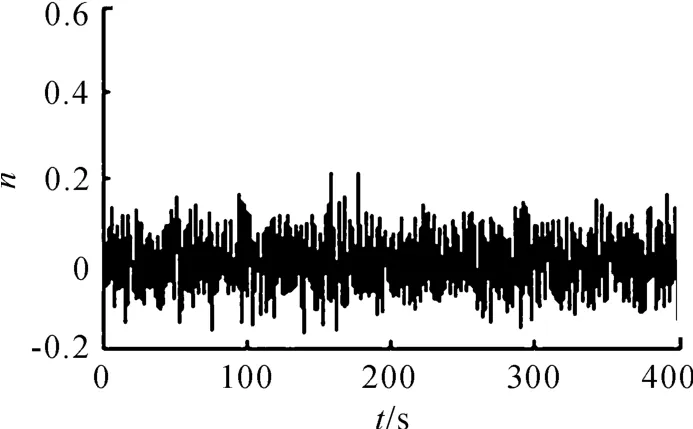
图5 自动驾驶仪断开时的过载
下面再来讨论紊流中飞行高度的变化,一般飞机在一定高度飞行时其自动驾驶仪的高度保持状态通路是打开的,这种情况下飞机颠簸过程中的高度变化幅度并不大(图6),发生颠簸时,常感到的是飞机的“抖动”或“振荡”。计算表明:在自动驾驶仪的高度保持状态通路断开,紊流区内飞行员不及时调整飞机姿态的情况下,飞机通过40 km的紊流区后,其高度可能偏离进入高度数10 m(图7)。如果紊流范围较大的话,飞机高度变化的范围会更大。曾经发生过民航客机在太平洋上空遇到强烈紊流,偏离航线高度数千米的状况。因此,在遇到较强大气扰动,断开自动驾驶仪的情况下,飞机颠簸时,飞行员应注意观察飞机高度的变化。
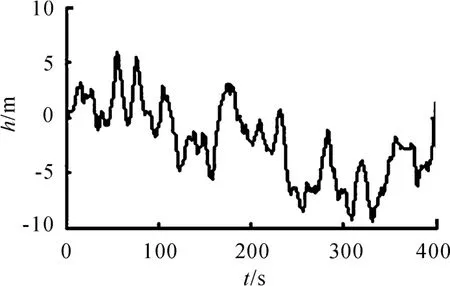
图6 自动驾驶仪接通时的高度变化
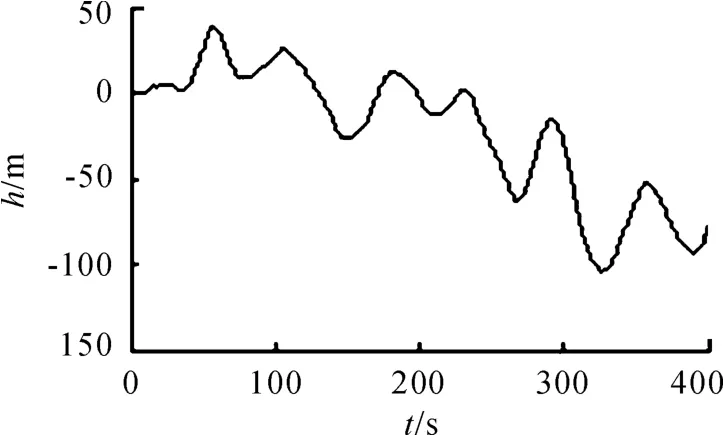
图7 自动驾驶仪断开时的高度变化
3 结束语
颠簸对于飞机的仪表指示、飞行员操纵飞机、飞机结构、飞行员完成飞行任务均有不同程度的影响。有关飞机在飞行中发生强烈颠簸情况的发生大都是由于各种气象原因引起的强烈大气扰动作用的结果。结合前面算例分析,建议在遇到颠簸时采取如下措施:
1)运输机本身具有较好纵向和侧向稳定性,加之扰动气流的变化具有较大的随机性,不易把握,所以在轻度的颠簸气流中飞行,只需要握杆、抵舵,靠飞机本身的稳定性和自动驾驶仪来保持飞行状态。
2)遇到强烈的颠簸气流,必须断开自动驾驶仪,以免造成危险过载。当飞机姿态或航迹变化较大时,应适当修正,修正操纵动作要柔和,因为扰动气流很不规则,粗猛和过于紧张的操纵动作很可能产生不良结果。
3)采用适当的速度。由飞行动力学理论可知,垂直于飞行速度方向的法向气流速度对飞行的影响最大。飞行速度越大,飞机法向过载的变化越大,飞机的颠簸强度也随之增强。
4)不要在中等颠簸以上的扰动气流中飞行,应适当的改变高度和航线,避开或脱离颠簸区。有关飞行资料表明[3],颠簸区厚度800 m以下占多数,水平范围以60~80 km居多。一般飞行应在低空向上脱离;在高空向下脱离;在云中或云旁应迅速脱离云体。
[1]肖业伦.航空航天器运动的建模[M].北京:北京航空航天大学出版社,2003.
[2]肖业伦,金长江.大气扰动中的飞行原理[M].北京:国防工业出版社,1993.
[3]航空气象学[M].中国人民解放军空军司令部出版,1991.
[4]程钊,于方圆.受油机扰动特性的建模与仿真[J].兵工自动化,2013(10):8-11.