某新型涵道无人飞行器飞行控制系统软件设计
2015-09-12唐小军郭昱津王道波谢建国
唐小军,郭昱津,王道波,谢建国
(1.南京航空航天大学自动化学院,南京 210016;2.中电集团第二十八研究所,南京 210007)
因传统构型涵道无人飞行器具有气动效率低、航程与航时有限、前/侧向飞行速度小等缺点,需研究开发一种新型涵道无人飞行器。本研究所设计的新型飞行器将固定翼飞机前飞速度快和垂直起降等特性组合,具备低速和高速相组合的飞行器特性,不仅使用方便,能够执行多种飞行任务,对地形环境适应性强,使用效能高,而且结构紧凑、体积小、使用安全,可以应用于侦查、监视,有着重要的应用价值[1-3]。
飞行控制系统是一种具有高性能的自动飞行控制、自主导航、任务管理的综合系统,通常由传感器、飞行控制计算机及其机载软件、执行机构。飞行控制计算机将传感器和执行机构联成一个整体,共同构成闭环的飞行控制系统。飞行控制计算机通过机载飞行控制软件处理传感器数据,实现控制律、管理任务设备、实现自主飞行,并完成相应的任务[4-5]。飞行控制软件作为飞行控制系统的核心,就显得尤为重要。因此设计一套相应的飞行控制软件具有重要的意义。
1 飞行控制系统软件总体设计
运用模块化设计方法,按功能将软件划分为若干模块,区分各模块之间的关系与逻辑顺序。所设计的飞行控制系统软件总体结构如图1所示,基于此结构图开发了机载飞行控制软件与地面遥控遥测软件。
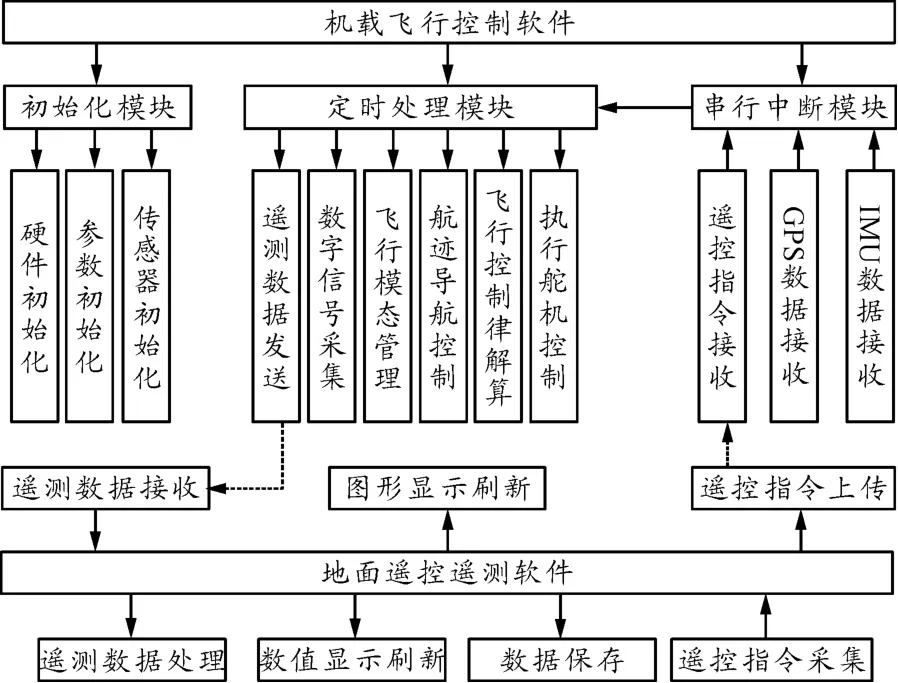
图1 飞行控制系统软件总体结构
2 机载飞行控制软件
飞行控制计算机核心处理器选用Infineon公司的XC167-CI的单片机处理器,该处理器支持基于C语言的程序设计,在涵道飞行器飞行控制软件的开发过程中,选用与硬件相匹配的TASKING编程开发环境,该应用程序安装在PC机上,按照飞行控制软件的功能需求和任务划分编写程序代码,然后进行编译和调试。
2.1 机载飞行控制软件总体结构
机载飞行控制软件采用模块化结构设计。飞行控制软件按功能可分为4个部分,如图2所示,分别为传感器信号采集模块、控制律解算模块、执行机构的指令信号输出模块以及无线数据通信模块。为了提高了程序的可维护性和可移植性,将每个模块独立封装。当某个模块性能和参数需要调整时,只需配置相应的模块即可[6]。
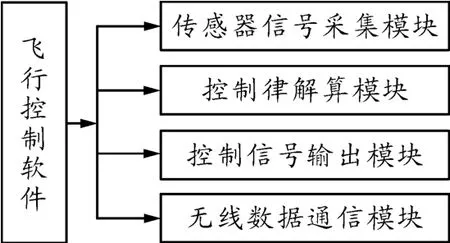
图2 飞行控制系统软件总体结构
1)传感器信号采集模块
涵道飞行器飞行控制时需要获得涵道飞行器的飞行姿态、航向、角速率、位置等信号和涵道螺旋桨转速等飞行状态信息。飞行状态信息是通过IMU和GPS传感器模块获得的,该模块通过RS232串口与飞行控制计算机进行通讯。涵道螺旋桨转速经信号均为脉冲信号,并进行数字转换后得到相应的转速值,涵道螺旋桨转速测量只在地面试验时进行测量,在实际飞行中可不进行反馈。在传感器数据采集模块中IMU和GPS传感器使用中断方式接收,涵道螺旋桨转速测量也通过中断的方式接收,中断流程图可在图3中体现。

图3 中断响应和定时器查询方式数据采集流程
2)飞行控制律解算模块
涵道飞行器飞行控制软件的核心是控制律的解算,该模块主要完成传感器信号采集模块和无线通讯模块采集的数据的处理,然后解析飞行控制指令,解算导航信息以及根据飞行控制律解算各通道的控制量。涵道飞行器飞行控制软件设定控制律解算模块的调用时间间隔为20 ms。
自主模式下的指令解析中,将无线通讯模块获得的指令解析为对应到涵道飞行器的不同任务指令,例如前飞、爬升、下滑、定高以及转弯等,再将控制指令进行换算为涵道飞行器的高度指令、速度指令以及姿态角指令,最后根据相应控制回路的控制律解算得到纵向操纵、横向操纵、航向操纵和涵道螺旋桨转速操纵的操作量[7]。操纵手的遥控指令解析为杆量,直接叠加到各通道的操纵量上。
3)控制量到舵机输出的解算模块
控制量到舵机输出的解算模块的调用时间跟控制律解算模块相同,由定时器触发,每隔20 ms将控制律解算模块得到的各通道操作量输出给舵机驱动模块,舵机驱动模块将控制信号经功率放大后驱动舵机运动,驱动涵道飞行器的相关执行机构随之动作。
4)无线数据通信模块
无线数据通信模块一方面负责接收地面遥控遥测系统向机载飞行控制系统发送的飞行指令信号,同时将飞行控制计算机收集的飞行状态信息通过无线数字电台发送到地面遥控遥测系统。飞行控制计算机接收遥控遥测系统的指令信号通过串口的中断查询方式实现,当设置的串口缓冲区满时触发串口中断,程序自动跳到数据接收模块中继续运行,当接收模块运行结束时退出中断。发送方式为定时发送,发送周期定为100 ms。如图3为中断响应和定时器查询方式数据采集流程图。
2.2 飞行控制软件流程
涵道飞行器控制系统工作原理为:通过数据采集传感器测量飞行器当前状态的实时数据,飞行控制计算机接收状态信息并结合当前飞行任务进行控制律解算,求得当前控制指令信号并输出PWM信号到转速控制电机与各电动舵机控制舵面,最后完成涵道飞行器飞行动作的改变,涵道飞行器飞行控制软件工作流程如图4所示。
初始化模块中主要完成飞行控制计算机各模块的初始化工作,包括系统时钟、定时器、中断、串口和PWM等模块,以及开启定时器;传感器信号采集模块的主要功能与任务是在每个采样周期内对IMU、GPS等传感器的实时输出数据进行采集和保存;控制量解算模块中,根据已设计的飞行控制律,结合涵道飞行器飞行状态采集模块收集的实时数据和解算出的飞行指令信息,计算得出涵道飞行器各通道的控制量[8];飞行控制计算机将舵机控制信号PWM信号经输出隔离后输出到各执行机构,驱动相应的涵道螺旋桨和舵机的舵面运动。
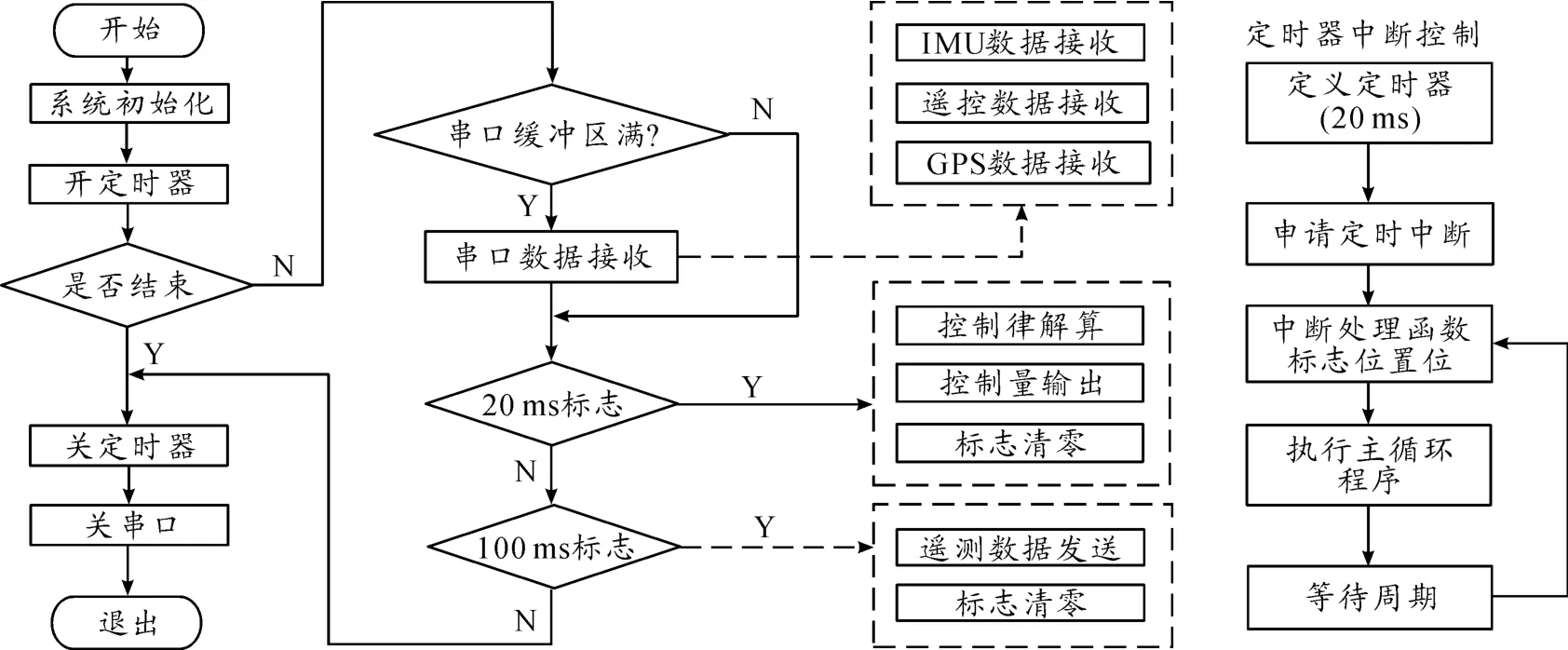
图4 涵道飞行器飞行控制软件工作流程
3 地面遥控遥测系统软件实现
地面遥控遥测系统的主要目的是对涵道飞行器的飞行状态和任务设备等进行实时监测与遥控,实时对遥测接收数据进行分析、对比与保存,定时对遥控指令数据进行发送,使得地面监控人员能够掌握涵道飞行器的飞行状态并及时切入人工干预控制模式处理涵道飞行器出现的异常情况,以尽最大可能减少甚至避免涵道飞行器的试验损失,因此要求涵道飞行器遥控遥测系统具有较好的人机界面[9],地面测控系统软件具体包括以下几个方面:
1)实时显示涵道飞行器飞行状态数据;
2)实时报告涵道飞行器机载设备工作状况;
3)动态显示飞行器的飞行姿态以及执行机构状态;
4)飞行控制指令盘以及存储飞行数据。
地面遥控遥测软件是在VC++6.0环境下开发的,采用模块化设计思想,主要有4个子功能模块,分别是遥控指令采集与发送模块、遥测数据接收与处理模块、界面显示模块以及飞行状态信息的存储模块,具体结构如图5所示。
遥控指令的采集与发送模块一方面采集USB接口的操纵杆指令,另一方面采集地面人员在遥控遥测软件界面中输入的指令或者界面指令盘按钮指令,该模块将这些指令经过编码校验等处理后通过无线电台模块发送给机载飞行控制计算机[10]。
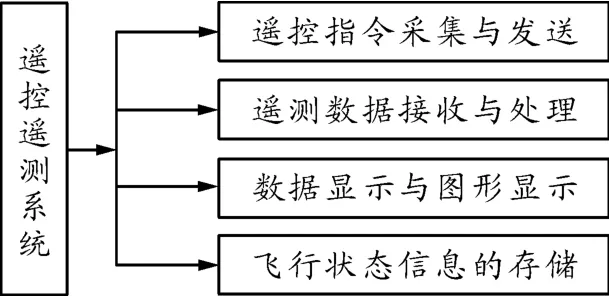
图5 地面测控系统软件构成
遥测数据接收与处理模块接收来自机载飞行控制系统的飞行状态信息,通过串口中断接收数据并根据通讯协议解码得到涵道飞行器的飞行状态信息。
数据显示与图形显示模块通过定时中断的方式刷新显示界面,定时器中断每次响应时,地面计算机以数据列表和图形曲线形式更新当前飞行器状态信息,包括飞行状态信息数据、指令盘、预设与实际航迹、姿态与航向二位图形显示、操纵杆量与涵道螺旋桨转速等,所设计的人机交互界面如图6所示。
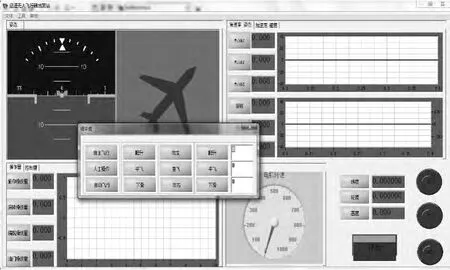
图6 地面测控软件人机界面
4 涵道飞行器飞行试验
将设计的飞行控制系统软件应用在新型涵道无人飞行器的飞行控制系统上,展开飞行器的悬停试飞试验,飞行试验中平面位移的变化如图7(a)所示,高度的变化如图7(b)所示。悬停试飞试验的结果表明所设计的飞行控制系统软件合理有效。图8为该飞行器的外场悬停试飞试验。
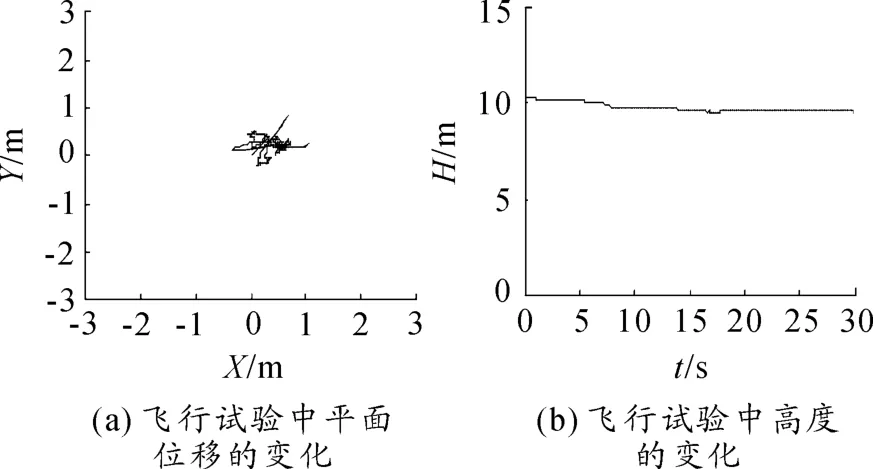
图7 平面位移与高度的变化曲线

图8 涵道无人飞行器外场试飞
5 结束语
基于新型涵道无人飞行器的研制要求,开发了一套包括机载飞行控制和地面遥控遥测的飞行控制系统软件,并应用于涵道飞行器中。该套飞行控制系统软件通过试验验证,达到了预期的目的,满足了飞行器的性能指标并实现了小体积化。
[1]李建波,高正.涵道风扇空气动力学特性分析[J].南京航空航天大学学报,2005,37(6):680-684.
[2]郭才根.无人驾驶直升机的应用与现状[J].中国航空报,2000(7):25-26.
[3]李远伟,奚伯齐,伊国兴,等.涵道式飞行器鲁棒控制系统设计[J].哈尔滨工业大学学报,2010,9(14):82-87.
[4]Corey Schumacher,Meir Pachter,Lior Pachter,et.al.Constrained Optimization for UAV Task Assignment[C]//American Control Conference.[S.l.]:[s.n.],2005:1-14.
[5]赵超.单旋翼涵道风扇式无人直升机建模与控制研究[D].南京:南京航空航天大学,2010.
[6]路引,王道波.基于DSP的双发无人靶机飞控系统设计[J].四川兵工学报,2011,32(12):42-45.
[7]Michael B.Donley,Norton A.Schwartz.United States Air Force Unmanned Aircraft Systems Flight Plan 2009~2047[Z].Headquarters US Air Force,2009:1-82.
[8]吴森堂,费玉华.飞行控制系统[M].北京:北京航空航天大学出版社,2005:8-104.
[9]谢建国.新型涵道无人飞行器飞行控制策略研究[D].南京:南京航空航天大学,2013.
[10]王宏强.旋翼/涵道风扇式无人直升机飞行控制若干问题研究[D].南京:南京航空航天大学,2009.
[11]都基焱,张振.小型无人机飞行控制系统硬件设计[J].兵工自动化,2014(9):64-67.