车用毫米波防撞雷达测距系统的研究
2015-09-07高敬轩庄秋慧张进科向友洪姜文强刘李龙
高敬轩 庄秋慧 张进科 向友洪 姜文强 刘李龙
(重庆理工大学 电子信息与自动化学院,重庆404100)
1 引言
随着现代社会工业化程度的迅速发展,汽车变得越来越普及,但交通事故也变得更加频繁,对人们造成了巨大的生命和经济损失。而且人们对汽车驾驶过程当中安全性、舒适性要求的不断提高,汽车雷达被广泛地应用在汽车的自适应巡航系统,防碰撞系统以及驾驶支援系统中。其中,毫米波雷达因探测精度高、硬件体积小和不受恶劣天气影响等优点而被广泛采用。
对大部分交通事故进行分析,事故都是因为司机反应不及所引起的,没有及时意识到危险的存在。如果司机能提前知道自己处于危险行驶中,并尽快做出相应措施,就能大大减少此类交通事故的发生。在这种背景下,汽车雷达就以不同的方式应运而生[2]。
2 防撞雷达的方案选择
当今社会有着各种不同的雷达方案,在各种领域都有着广泛地应用。例如超声波技术,视频摄像图形识别技术,激光定位技术,红外成像技术,毫米波技术等[3],每一种技术有着自己的特点,适用于不同的需求。就汽车雷达应用方面,毫米波技术具有着很大的优势。通过对在不同自然环境下,各种测距方式的效果进行比较可得表1。
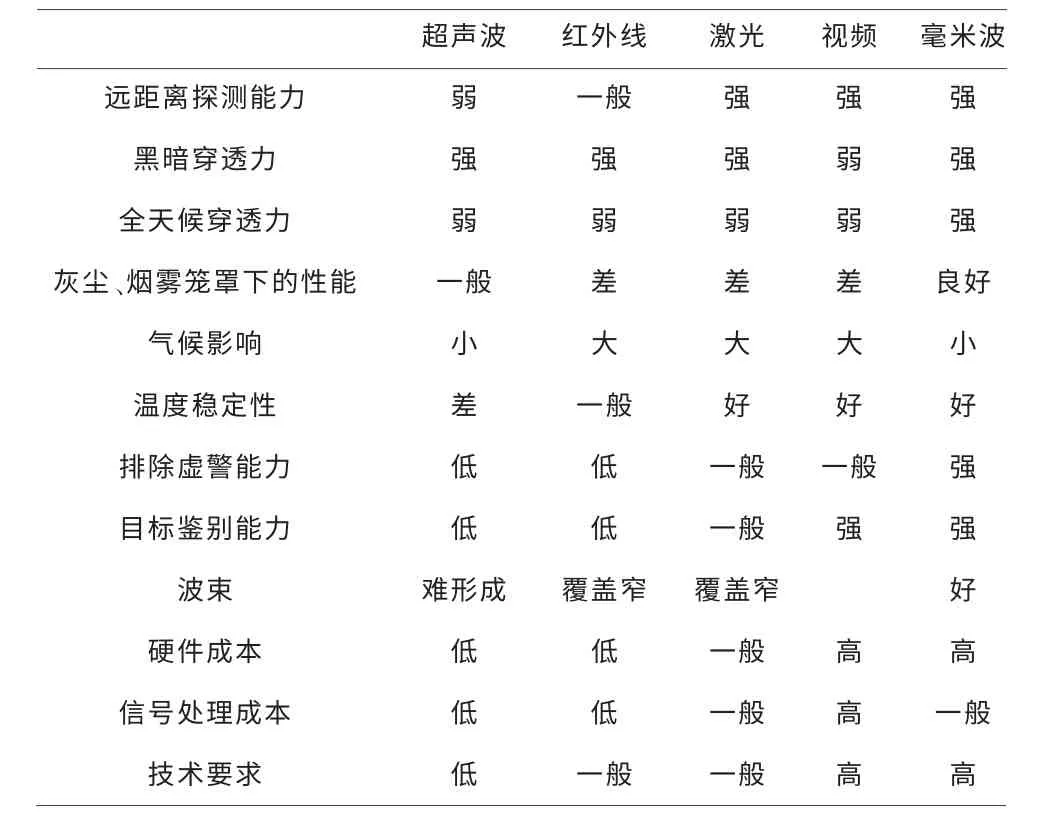
表1 不同雷达技术在各种环境下的功能测试
由表1分析可得,在探测能力和抗干扰能力方面,毫米波技术都优于其他方案,且能很好地防止虚警的发生,这些优点让毫米波成为汽车雷达方面的热门技术。此次设计笔者选择毫米波技术[4]作为汽车前后精确测量的方案。
3 线性调频连续波(LFMCW)雷达测距系统
LFMCW雷达测距系统的工作原理:首先LFMCW毫米波雷达在系统控制下由天线发射信号,该信号遇目标后返回雷达进入混频器与本振信号混频,产生系统需要的目标中频信号,然后中频信号进入中频放大滤波模块进行放大滤波处理,最后由目标探测LFMCW雷达测距系统对此信号进行采集、显示、存储和后续的数字信号处理[5]。
发射频率曲线(实线)接受频率曲线(虚线)均成锯齿状,两者存在一定时间延迟。发射和接收信号的频率变化[6]如图2所示。
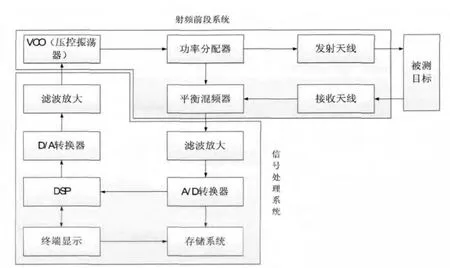
图1 LFMCW雷达测距系统的基本组成
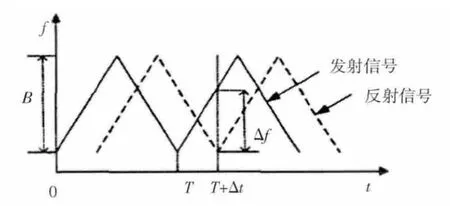
图2 LFMCW雷达发射和接收信号频率-时间曲线
设发送信号和接收信号之间的时间延迟为Δt,车与障碍物(假设两者相对静止)之间距离为R,c为光速,则:

发射信号与接收信号的频率差为混频输出的中频信号频率Δf,如图3所示。

图3 混和中频信号
根据相似关系可得:
例 10 要防止和克服地方和部门保护主义、本位主义,决不允许“上有政策,下有对策”,决不允许有令不行、有禁不止,决不允许在贯彻执行中央决策部署上打折扣、做选择、搞变通。[1]386

其中T为调制三角波的周期,B为调频带宽。由(1)、(2)可得:,即待测距离R与雷达前段输出的中频频率成正比[7]。
多数情况下,两者不会保持静止。当两者相对运动时,根据多普勒效应,发射和接收信号将发生频移fd。发射信号与接收信号进行混频后,产生了差拍信号:

其中,fb+和fb-分别代表前半周期正向调频和后半周期负向调频所得的差频,v为汽车和障碍物的径向速度,f0为发射波的中心频率。由(3)、(4)可得:

根据式a和式b所得的值,通过显示模块进行显示,并判断R和v是否超出安全范围,若超出,则通过对应模块进行声光报警。
4 处理器的选择与CAN总线
4.1 处理器的选择
当下FPGA和DSP在雷达方面都有着不俗的发展。根据需求的不同,方案选择也存在着差别。
FPGA:时序控制能力强(时序能力强,没有指令周期,速度快),控制能力较强,数字信号处理及算法弱。
DSP和FPGA开发的区别:
DSP,专用电路通过对RAM内部的指令和数据工作。所以开发遵循嵌入式软件的设计原则。调试应更注重于算法的实现。而FPGA,ASIC一种,经典FPGA的内部结构是寄存器+组合逻辑,最后是按照逻辑电路进行设计。所以属于硬件设计原则。调试除了需要关心功能以外,还需要关心电路方面的特性。比如说延迟,整体功率等等。
本测距系统主要注重于通过算法处理所接收的数据信号,通过DSP处理来达到雷达测距的目的。
4.2 CAN总线
为防止汽车在使用寿命期内由于数据交换错误而对司机造成危险,汽车的安全系统要求数据传输具有较高的安全性。从总线系统数据的角度看,可靠性可以理解为,对传输过程产生的数据错误的识别能力。

而CAN总线具有以下优点:
4.2.1 废除传统的站地址编码,代之以对通信数据块进行编码,可以多主方式工作。
4.2.2 采用非破坏性仲裁技术,当2个节点同时向网络上传送数据时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响继续传输数据,有效避免了总线冲突。
4.2.3 采用短帧结构,每一帧的有效字节数为8个,数据传输时间短,受干扰的概率低,重新发送的时间短。
4.2.4 每帧数据都有CRC校验及其他检错措施,保证了数据传输的高可靠性,适于在高干扰环境下使用。
4.2.5 节点在错误严重的情况下,具有自动关闭总线的功能,切断它与总线的联系,以使总线上其他操作不受影响。
4.2.6 可以点对点,一对多及广播集中方式传送和接收数据。具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点。
4.2.7 采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作。
5 结语
通过汽车雷达网络的开发,可以带动车载网络技术、车载计算技术的发展,以便在即将形成的巨大的汽车雷达网络系统行业争得一席之地。随着智能系统研究的不断发展与创新,防撞控制领域需要越来越多的雷达传感器[8],LFMCW毫米波雷达作为其中最具潜力的一种,前景一片光明。特别是随着DSP的发展及其在这方面的优越性,将使DSP在汽车雷达这方面得到更大的发展空间。
[1]丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学,2002.
[2]任亚欣.汽车防撞雷达概述[J].北京:科技情报开发与经济,2007,17(17):153-154.
[3]赵树杰.雷达信号处理技术[M].北京:清华大学出版社,2010.
[4]郑兴林.毫米波汽车防撞雷达信号处理关键技术研究[D].成都电子科技大学,2007.
[5]杨建宇.线性调频连续波雷达理论与实现[D].成都电子科技大学,1991.
[6]张立志,汪学刚,向敬成.调频线性度与LFMCW雷达距离分辨力的关系[J].信号处理,1999(15):93-97.
[7]姜行果.基于DDS的线性调频雷达波形发生器的设计与实现[D].北京:中国科学院研究生院,2007.
[8]任开春,涂亚庆.LFMCW雷达线性度的检测新方法[J].现代雷达,2006,28(8):13-17.