一种三维人体表面成像技术在人体烧伤面积估算中的应用
2015-09-06董国胜唐洪泰龙文铮
姚 砺,董国胜,唐洪泰,龙文铮
(1. 东华大学 计算机科学与技术学院,上海201620; 2. 第二军医大学附属长海医院烧伤科,上海200433)
一种三维人体表面成像技术在人体烧伤面积估算中的应用
姚 砺1,董国胜1,唐洪泰2,龙文铮1
(1. 东华大学 计算机科学与技术学院,上海201620; 2. 第二军医大学附属长海医院烧伤科,上海200433)
提出了一种人体成像技术应用在人体烧伤面积评估中的系统框架.通过Kinect设备扫描烧伤人体获取真实的三维坐标数据及颜色信息,对这两种数据进行配准和叠加,并利用Kinect Fusion技术将各帧数据融合以重建三维彩色模型,设计了三维模型特征区域提取及面积计算方法. 最后,通过对纸箱模型进行测量并采用贴片对真实人体模型模拟烧伤区域与面积计算的试验,证明了系统的可行性.
三维重建; 烧伤面积; Kinect; 特征区域提取
烧伤面积的精确估算对烫烧伤临床诊治起到至关重要的作用. 创面形状、分布深度的不同,以及不同医生对同一创面的判断及认识不同,都会导致医疗工作者对伤情判断、治疗策略产生极大差异. 因此,人工估算烧伤面积不具有可重复性和可比性,不能建立统一的评价标准[1].
自18世纪以来,人们不懈地寻找简便、准确、快速的人体烧伤面积估算方法. 进入20世纪,以“ Lund- Browder 表格法”[2]或“九分法”(Rule of Nines)[3]为主、“手掌面积法”(Rule of Palms)[4]为辅的烧伤面积评估方法在国际上被广泛应用. 然而,这些方法均为粗略的二维估算法,受主观因素影响大. 随着计算机技术的革新和治疗理念的改变,近十几年来,已有众多学者借助3D技术的蓬勃发展及其独特的优势,研发了一系列计算机辅助3D人体体表面积估算方法. 如台湾“清华大学”开发的3D人体扫描系统[5],但由于该设备要求场地设施固定,采集信息时受试者必须直立,硬件设施昂贵,且受试者身体的移动会导致结果偏差较大,不适用于大面积烧伤或者特殊部位烧伤的估算,缺乏临床实用性.
奥地利研发的Burncase 3D[6-8]及美国研发的EPRI 3D Burn Vision[9]系统,均可通过选择系统中预先存储的人体模型进行烧伤面积诊断,其主要缺点是没有考虑肥胖体质、身体畸形等因素,不能覆盖广大人群,且体重指数(body mass index,BMI)对身体表面积及体型的影响很大[10]. 基于此,文献[11]开发了针对人体体型、年龄等特征选取相应模型进行烧伤评估的BAI系统软件. 该软件仍然应用了预设的有限的3D模型,虽然预设的3D模型存储只用了固定的存储空间,在一定程度上限制了空间消耗,但仍存在特定特征模型缺失的局限性,使用户不能及时获得实际精确的3D模型,因而造成测量误差.
为了解决上述问题,本文提出一种利用人体成像技术进行人体烧伤表面积评估的应用系统. 该系统利用便携式设备Kinect对人体进行扫描,经过系统处理获取三维彩色模型,进而评估模型上的烧伤区域面积.
1 系统框架
本文提出的系统主要由3部分组成:便携式人体扫描系统、三维人体模型、交互式烧伤面积估算,如图1所示.

图1 三维人体表面成像技术在人体烧伤面积估算中的应用流程Fig.1 3D human body surface imaging in the human body burns estimating process
1.1 便携式人体扫描系统
便携式人体扫描系统由硬件系统、三维数据采集及校准算法构成. 通过手持扫描设备绕行人体,如图2(a)所示,采集带有深度信息的数据,通过特定的标定矩阵校准后获得三维空间的点云数据.

(b) 实际扫描过程
本文采用的手持扫描设备是微软公司为XBOX360游戏机开发的一个体感外设Kinect,其配有3个镜头,中间的镜头是RGB VGA摄像头,分辨率为640像素×480像素,左、右两侧镜头则分别为红外线发射器和红外线CMOS摄像头所构成的3D深度感应器,统称为深度摄像头,其分辨率也为640像素×480像素. 深度摄像头采用光编码(light coding)方法,即利用光线对待扫描的空间进行编码. 通过利用红外摄像头按照一定规律发射点阵,然后采用一个普通的CMOS传感器捕获该点阵. 发射的点阵中有一些模式会在整个投影画面中重复出现,摄像头的点阵随着场景深度的变化而变化. 利用这种点阵的模式变化情况可以推断出目标物体或场景各点的深度信息. 因此,从Kinect获得信息有两种,一是彩色信息,二是深度信息.
由设备采集的深度信息得到二维的深度图像. 为了真实测量人体相关尺寸和区域面积,通过扫描设备预设的标定矩阵以及扫描设备与目标之间的角度关系,将二维深度图像转化为具有三维坐标信息的点云数据. 同时,为了便于用户在模型上寻找特定的烧伤区域,还需要采集彩色信息. 由设备采集的彩色信息是普通的二维图像,将彩色二维图像和转化的点云数据进行匹配与叠加,可以得到具有彩色信息的三维点云.
1.2 三维人体模型
3D人体模型由具有三维坐标和彩色信息的三维点云数据组成,并通过网格化的表面重建过程体现出人体的表面效果. 从扫描系统采集和转化而来的点云数据起初是一片一片的,每片数据都是独立的,并不能构成完整的人体模型,而且还包含了不需要的背景信息以及噪声数据. 三维人体模型子系统的目标是对扫描系统获得的各片点云数据进行配准并重建人体表面,最终得到带有彩色信息的完整、光滑的曲面,该曲面构成了目标人体的3D模型.
从扫描系统获得的带有彩色信息及三维坐标的点云数据,经过特定的配准算法和表面重建方法,首先得到完整的场景模型,然后利用三维点云处理软件Meshlab对该场景模型进行手动操作去除复杂的背景并适当过滤噪声,最终可得到需要的人体模型.
ICP(iterative closest point)配准算法[12]是一种经典的点云配准方法,但应用该算法直接进行点云配准的效率很低,不能满足实时性要求. Kinect Fusion[13]舍弃以往直接使用ICP叠合多组不同视角的点云信息的传统做法,改为在三维空间中通过许多立体像素组成区域空间的Volumetric法来建立场景的三维信息. Kinect Fusion采用GPU并行计算处理数据,可以很大程度上提高数据处理速度,达到实时的三维重建效果.
本文基于改进的ICP配准方法和Kinect Fusion技术构建三维场景信息. 经过配准、重建以及过滤,最终获得的三维人体模型包含了具有三维坐标与彩色信息的点云数据以及顶点构成的网格面片信息.
1.3 交互式烧伤面积估算
在获取三维人体模型后,通过一个独立的大型处理二维/三维图像和点云数据的开源工程PCL (point cloud library) 实现可视化平台,展示模型结果,并为用户提供对模型的任意放大、缩小、360°旋转、对比调整等操作. 用户可以根据模型上的信息分布给定指定区域,交给系统处理,系统则首先计算模型上指定区域内的所有点,然后计算这些点相关的三角网格面积和,最终输出该指定烧伤区域的面积.
2 关键技术
2.1 多幅点云数据配准及彩色表面重建
ICP算法将当前三维图像的点云数据与上一帧的点云数据匹配. 当第一组点云中的每一个点对应到第二组点云中与其特征相似点的距离最小时,可以得到一组相邻两空间的最佳平移和旋转数值,然后计算出相对于全局坐标系(世界坐标系)的平移向量和旋转矩阵,最后得到整体全局模型点云数据.传统ICP算法的3个终止迭代的条件:
(1) 迭代次数超过被设置次数;
(2) 最后一次迭代的对齐变换值和当前估计对齐变换值的差比被设置值小(即找到最近点);
(3) 欧式距离的平方和小于给定的阈值.
因此,传统ICP算法的复杂度为O(N·M·S),其中,N为目标点云中点的个数,M为最近点的个数,S为最终迭代次数.
显然,上述ICP配准不能很好地满足实时建模的要求. 在实时扫描过程中,程序以30帧/s的速度来读取数据,数据之间差异很小,因此,可以假设当前帧点云的位置变化较上一帧点云的位置变化很小. 所以可以将传统ICP算法的终止迭代条件(2)改为直接将两个点云(当前点云和上一帧点云)投影到模型的照片帧上,如果两个点重合在同一个像素点上,则说明这两个点彼此匹配,进而终止此次迭代. 此算法运行在GPU上,并利用其变化的渐进性(连续两帧之间的细小变化)来计算转换矩阵(平移和旋转矩阵). 改进后的ICP算法复杂度为O(S),S为迭代次数.
Kinect Fusion使用深度数据进行三维重建,避免了彩色图像进行特征点匹配的误差,同时由于其基于GPU并行计算处理数据的能力,可以达到实时的三维重建效果. 此方法首先测量物体表面到每个立体像素的距离值,同时还需要设置一个权重值,此权重值由物体表面的法向量对应的深度信息的射线向量计算得到,权重值代表了该立体像素的重要性. 研究发现,在彩色重建时,权重值的范围是影响最终彩色模型效果的一个重要因素.
2.2 特征区域提取及面积估算
在人体三维模型建立的基础上,为了获取烧伤轮廓并计算面积,用户必须对烧伤区域进行标记,即在人体模型数据上标示出烧伤区域作为系统待识别的特征区域. 具体的特征区域提取流程如下:
(1) 用户在彩色模型视图上对特定色彩区域(即烧伤肤色区域)的边界选取关键点,并通过系统标记出来.
(2) 系统首先勾勒出特征区域的边缘,即各相邻两关键点之间拉线形成封闭的环,如图3(a)所示.
(3) 找到各条边上的所有顶点,即特征区域边缘附近的所有点,如图3(b)所示.
(4) 在特征区域所在最小矩形内寻找所有特征点,即特征区域内部点,如图3(c)所示.
(5) 计算特征区域面积. 在边缘所围的区域内找到与特征点关联的所有三角网格,如图3(d)所示,去除重复的三角网格,计算所有三角网格的面积之和. 计算面积时,需要去除特征区域边缘点的外围区域上的网格,否则会由于边缘导致计算面积区域变大,如图4所示.

图3 人体烧伤面积计算模型Fig.3 Computational model of body burn area
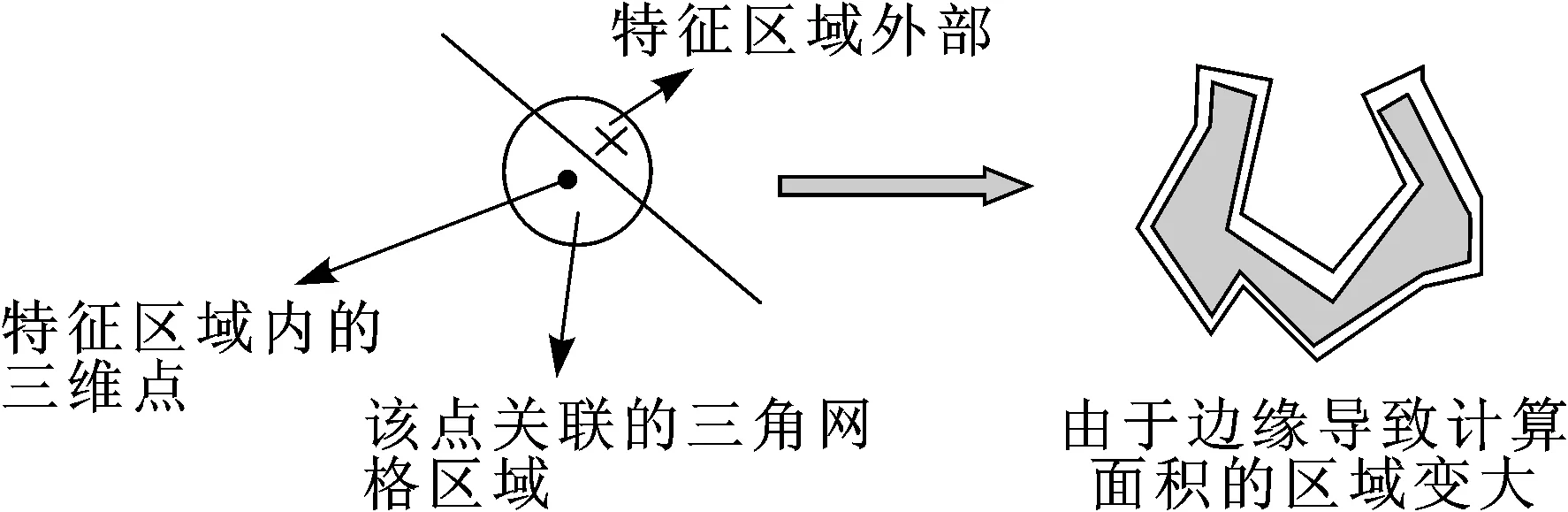
图4 特征区域的边缘区域Fig.4 The edge of the feature region
通过面片的3个顶点坐标确定各边边长,并根据海伦公式面积法,得到面片Fi的面积为

(1)
模型总表面积为
(2)
其中:PFi-p1p2p3=(DFi-p1p2+DFi-p1p3+DFi-p2p3)/2; Fi-p1(xFi-p1,yFi-p1,zFi-p1),Fi-p2(xFi-p2,yFi-p2,zFi-p2)和Fi-p3(xFi-p3,yFi-p3,zFi-p3)为第i个三角面片Fi上的3个顶点;DFi-p1p2,DFi-p1p3,DFi-p2p3为点的距离即各边边长;n为三角面片的总数.
3 试验结果与分析
本文试验所使用的计算机设备的中央处理器为Intel(R) CORE i7-2600,系统使用显卡为Nvidia GTX660且显存为2GB. 由于人体特征数据的特殊性,以及测量的不方便性,为了说明扫描得到的人体三维数据的可试验性,首先对可进行实物测量的物体进行3D扫描及重建,计算面积并进行误差分析,进而评估系统的稳定性和可用性;再对人体进行实际测算,在其身上通过不同大小、形状、颜色的贴片模拟不同面积的烧伤创面,应用3D扫描系统对烧伤面积、颜色、身体成分等进行分析计算,并与真实数据(实际贴片面积)进行比较.
3.1 可测量物体监测结果
本文首先对图5所示的传统纸箱进行了三维扫描,并分别在实际物理空间和三维模型空间中10次测量其长、宽、高值进行表面积计算,在两种空间下测量结果的比较如图6所示.
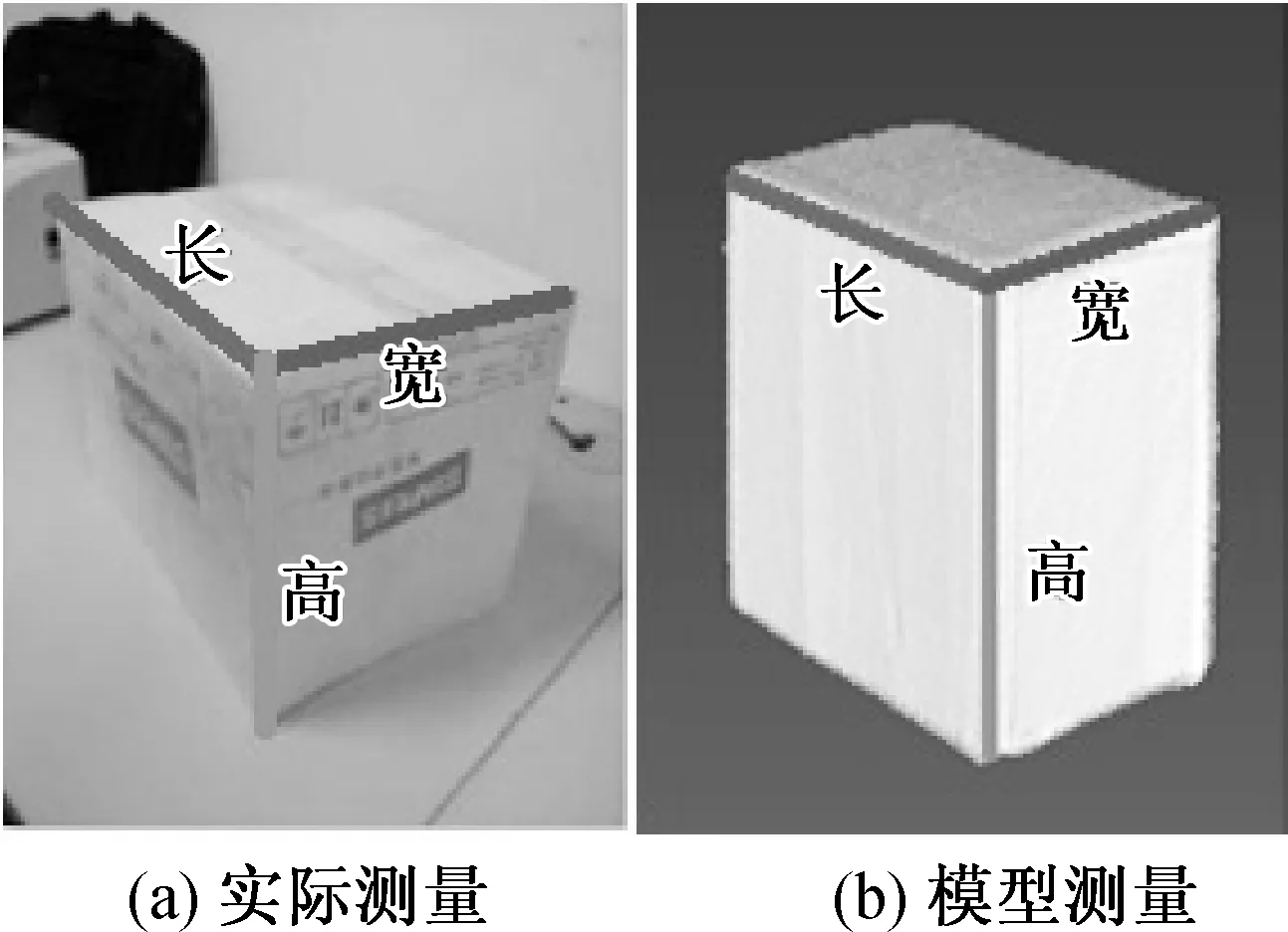
图5 纸箱实际测量和模型测量Fig.5 Cartons measuring the actual measurement and modeling
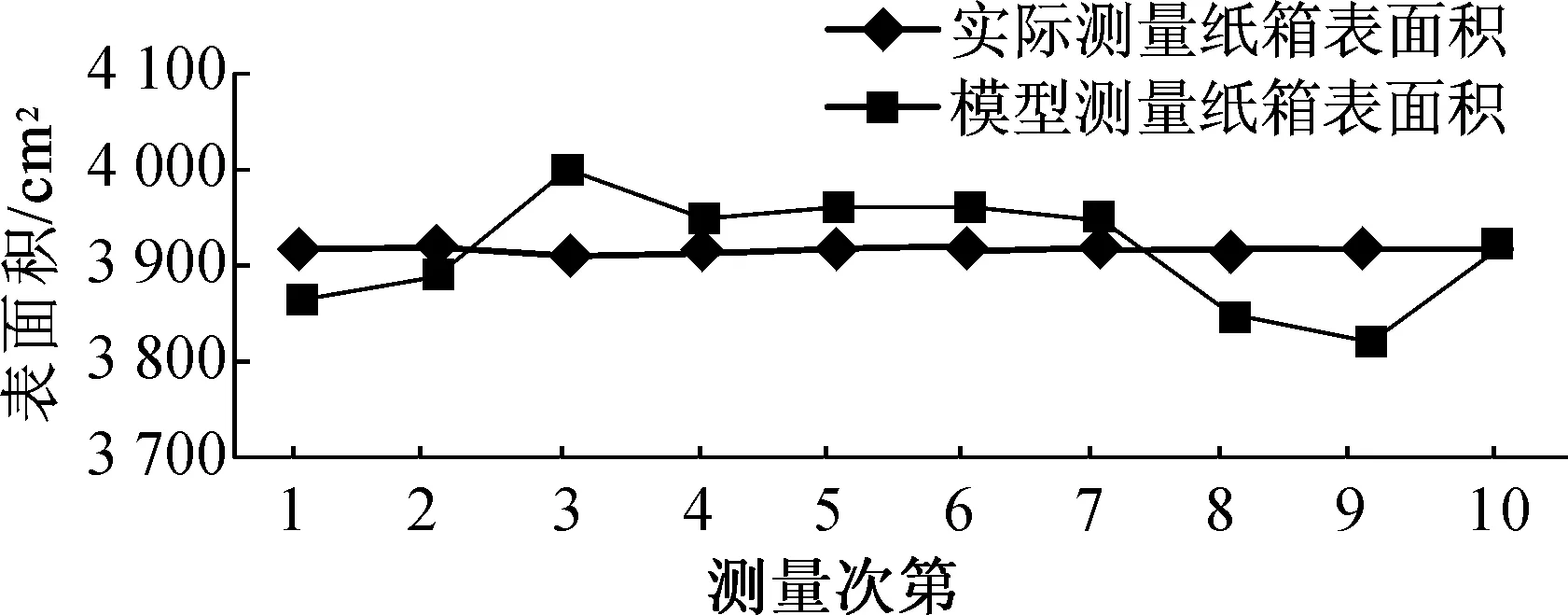
图6 纸箱表面积测量情况Fig.6 Chart of carton surface area measurement
对纸箱表面积实际测量结果和模型测量结果进行统计学误差分析得到的结果如表1所示. 由表1可知,模型测量纸箱数据表面积的相对精密度达到了1.257%,所以利用本文的三维模型进行物体表面积测量具有较高的应用价值.

表1 误差分析Table 1 Error analysis
3.2 模拟监测
(1) 模拟监测一.烧伤模拟贴片采用如图7所示的长方形纸牌,长为8.71 cm,宽为 5.71 cm,测试结果如表2所示.
(2) 模拟监测二.烧伤模拟贴片采用如图7所示的直角三角形纸片,底边长为10.65 cm,高为 10.81 cm,测试结果如表3所示.

图7 模拟监测实物图Fig.7 Photo ofphysical for analog measurement
由表2和3可知,长方形纸牌模拟贴片的特征区域测量误差区间为0.55%~6.10%,直角三角形纸片模拟贴片的特征区域测量误差区间为0.13%~3.92%,由此说明,在手动勾选特征区域易引起人为误差的情况下,本文系统仍能保证很好的精确度.
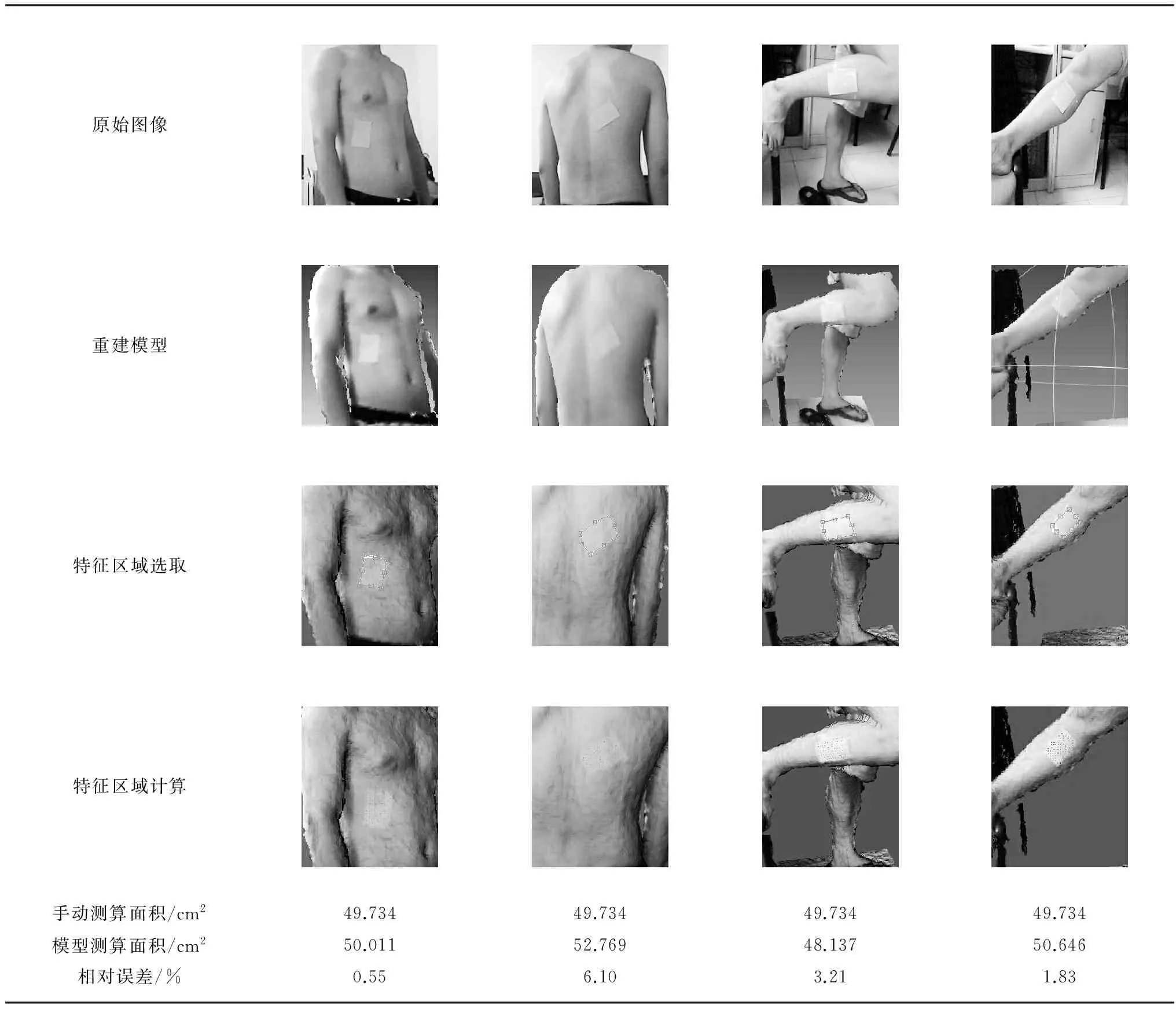
表2 纸牌贴片烧伤面积评估模拟监测Table 2 Solitaire patch burn area assessment analog monitor

表3 直角三角形贴片烧伤面积评估模拟监测Table 3 Triangle patch burn area assessment analog monitor
基于三维人体模型的烧伤面积估算的精度依赖于两方面:一是人体表面模型数据获取,二是烧伤区域的选取和测量. 本文提出的基于Kincet实时建立真实人体模型,与传统的从现有模型库中筛选近似人体模型的方法[6]相比,更具可靠性,且不需大量存储空间,只需保存病人相关的文本信息.从本文对规则形状物体和贴片的测量结果分析可知,本文提出的基于Kinect人体成像技术获取人体三维模型并计算区域面积具有可行性.
4 结 语
本文提出了基于Kinect的人体成像技术在人体烧伤表面积评估中应用的系统框架,与传统的烧伤面积评估方法相比,该方法具有明显的优势. 首先,提出的人体成像技术对人体几乎没有伤害,且设备成本低且便携,可以快速获得真实信息,并能实时观测模型结果;其次,在真实数据的模型上计算烧伤区域及其面积,避免了实际测量中对病人过久的干扰等,而且还减少了医生主观判断的误差;最后,通过本文的方法获取模型数据,不仅可以应用于创伤,还可以用于其他各种体表疾患(疤痕、皮肤疾病等)皮损范围的测算,具有广阔的前景.通过对重建后的三维模型测量数据与实际物理空间测量的真实数据的比较,证明本文提出的三维人体表面成像技术在人体烧伤面积估算应用的可行性.
本文采用交互式的三维特征区域提取的方法理论上适于具有直线段边缘的区域,并且模拟监测的试验结果证明了该方法对提取多边形区域精确可靠,但本算法对类似皮肤烧伤区域存在弧形的边缘提取还有待进一步研究. 此外,模型的彩色重建方面也有待进一步完善:一是彩色模型出现的花斑;二是由于扫描不充分模型上出现空洞;三是实现实时去背景以达到实时获取干净的目标模型.
[1] JOSE R M,ROY D K,VIDYADHARAN R,et al. Burns area estimation: An error perpetuated[J]. Burns,2004,30(5): 481-482.
[2] LUND C C,BROWDER N C. The estimation of areas of burns[J]. Surg Gynecol Obstet,1944,79: 352-358.
[3] WALLACE A B. The exposure treatment of burns[J]. The Lancet,1951,257(6653): 501-504.
[4] WACHTEL T L,BERRY C C,WACHTEL E E,et al. The inter-rater reliability of estimating the size of burns from various burn area chart drawings[J]. Burns,2000,26(2): 156-170.
[5] YU C Y,LO Y H,CHIOU W K. The 3D scanner for measuring body surface area: A simplified calculation in the Chinese adult[J]. Applied ergonomics,2003,34(3): 273-278.
[6] HALLER H L,DIRNBERGER J,GIRETZLEHNER M,et al. “Understanding burns”: Research project BurnCase 3D: Overcome the limits of existing methods in burns documentation[J]. Burns,2009,35(3): 311-317.
[7] DIRNBERGER J,GIRETZLEHNER M,LUCKENEDER T,et al. BurnCase 3D: Realistic adaptation of 3-dimensional human body models[C]// Medical Image Computing and Computer-Assisted Intervention. Springer Berlin Heidelberg,2004: 363-370.
[8] DIRNBERGER J,GIRETZLEHNER M,RUHMER M,et al. Modelling human burn injuries in a three-dimensional virtual environment[J]. Studies in Health Technology and Informatics,2003,94: 52-58.
[9] NEUWALDER J M,SAMPSON C,BREUING K H,et al. A review of computer-aided body surface area determination: SAGE II and EPRI’s 3D Burn Vision[J]. Journal of Burn Care & Research,2002,23(1): 55-59.
[10] LIVINGSTON E H,LEE S. Percentage of burned body surface area determination in obese and nonobese patients[J]. Journal of Surgical Research,2000,91(2): 106-110.
[11] PRIETO M F,ACHA B,GMEZ-CIA T,et al. A system for 3D representation of burns and calculation of burnt skin area[J]. Burns,2011,37(7): 1233-1240.
[12] SEITZ S M,CURLESS B,DIEBEL J,et al. A comparison and evaluation of multi-view stereo reconstruction algorithms[C]// IEEE Computer Society Conference on Computer Vision and Pattern Recognition. 2006: 519-528.
[13] IZADI S,KIM D,HILLIGES O,et al. KinectFusion: Real-time 3D reconstruction and interaction using a moving depth camera[C]//Proceedings of the 24th Annual ACM Symposium on User Interface Software and Technology. 2011: 559-568.
Application to Body Surface Burn Area Estimation Using 3D Imagining Techniques
YAOLi1,DONGGuo-sheng1,TANGHong-tai2,LONGWen-zheng1
(1. School of Computer Science and Technology,Donghua University,Shanghai 201620,China;2. Department of Burns,Changhai Hospital,Second Military Medical University,Shanghai 200433,China)
A framework of body imaging techniques applied to the evaluation of the body surface burn area was presented. The burned body was scanned by Kinect,where the 3D data from real world and its corresponding color information were obtained. Then, by rectifying and adding together the obtained data and by fusing the frames with Kinect Fusion,a 3D color model was reconstructed. The feature region extraction and area computation method for 3D model were designed. Finally,the experiment of a box model was measured and burn areas on real body model were simulated with patches,which proved the feasibility of the system.
3D reconstruction; burn area; Kinect; feature region extraction
1671-0444(2015)01-0084-07
2013-09-30
国家自然科学基金资助项目(81372057)
姚 砺(1967—),男,安徽合肥人,副教授,博士,研究方向为图像处理模式识别、软件测试.E-mail:yaoli@dhu.edu.cn
TP 399
A
