基于转速闭环的低速电动车电机控制系统
2015-09-04李庆韩松
李庆韩松
(1.天津清源电动车辆有限责任公司;2.中国汽车技术研究中心)
随着我国电动车行业的快速发展,低速电动车(包括低速电动轿车和各种场地用车)以其结构简单、关键部件成熟且成本较低的优势在我国二、三线城市及广大农村地区逐渐成长起来。作为电动车的核心部件——电机控制器也已经得到广泛应用。目前市场他励直流电机控制器作为主流产品,虽然具备了基本功能,但是可靠性不高且不具备转速闭环功能,无法解决下坡时的速度限制问题,由此引发的回馈电压过高和电池易损坏的问题制约着直流电机控制器的安全应用。文章提出的方案有效地提高了电机控制器的性能和一致性,并解决了汽车的安全性问题。
1 他励直流电机控制器系统电路设计
1.1 硬件总体设计
文章研究的控制器产品硬件总体结构,如图1所示。由电源、直流电机和TMS320LF2407为核心的控制器构成[1]。铅酸蓄电池组电压为48 V,主回路功率部分由并联的MOSFET管构成,电枢电流和励磁电流分别由磁环和线性光耦进行采样,利用DSP的内部模块进行AD转换,并利用软件进行滞环控制。TMS320LF2407输出3对PWM信号,其中1对用来控制电枢,2对脉冲控制励磁回路。DSP输出的脉冲信号经过驱动隔离后,驱动MOSFET来控制电机转动。主控芯片采用了6路AD采样通道,分别用来采集电池电压、电枢电流、励磁电流、控制器温度及油门踏板等信号。I/O口用来采集电机运行状态,包括正反向、互锁及紧急刹车等。
1.2 功率模块
1.2.1 智能功率模块
智能功率模块(IPM)包含了IGBT芯片及外围的驱动和保护电路,包括过电压、过电流和过热等故障检测电路,并可以结合CPU来保护功率器件。但是由于IPM集成度较高,价格目前仍较高,对于电压较高和电流适中的控制器产品,IPM不适合低成本设计[2]。
1.2.2 功率MOSFET及其驱动电路
MOSFET为电压驱动型功率器件,具有驱动功率小、工作频率高及价格较低等优点。对于低成本设计,MOSFET是首要选择。电机在重载和启动状态时,电枢电流最大可达到400 A,考虑稳定裕量,选择了8支MOSFET管并联的方案,理论上可以承受600 A的大电流,如图2所示。由于并联组合管中某个管电流增加时,其工作温度升高而电阻增大,进而限制了电流的增长,所以自动均流是并联组合管的特点。
励磁回路采用全桥MOSFET控制回路,如图3所示。每个回路由2支MOSFET管并联,励磁电流的最大裕量可达到200 A,电动车应用条件下最大励磁可达到64 A左右,因此考虑到稳定性,选择较大的裕量[3]。
在产品设计过程中,选用的MOSFET的型号为IR4710,耐压值为100 V,漏极电流为75 A,漏源之间的通态电阻为0.014 Ω。通过借鉴和试验,确定8个IR4710并联,励磁回路每个支路由2个MOSFET并联。
对于MOSFET的驱动电路,选用IR2110高压浮动MOS栅极驱动集成电路模块,该模块驱动高压侧和低压侧2个元件时,不需要独立的驱动电源。图4示出IR2110MOSFET驱动模块示意图,VB给集成电路高端驱动电路提供电源,电压为16 V。自举电路由二极管和电容C14组成,当VS被拉到地时,16 V的电源通过二极管给自举电容充电;当高端MOSFET导通时,VS的电压即为主回路高端的电压。
1.2.3 转速采样电路
电机转速采样电路,如图5所示。
该电路采用非接触式霍尔传感器,传感器输出占空比信号,信号电压幅值为5 V,当电机匀速旋转时,传感器输出为50%占空比脉冲。
控制器软件采用M法测速,即通过检测单位时间输出的脉冲数,来计算电机的转速。
2 他励直流电机控制器软件设计实现
2.1 总体设计方案
文章提出的方案是根据电动车控制的实际情况来进行程序的设计,电机控制模块以TMS320LF2407为主控芯片。程序需要实现的功能为:通过采集开关状态信号来判断电机的运行状态,同时结合加速器开度的采样来给定电机的励磁电流占空比和电枢电流占空比,以此来控制电机的转速,加减速等特性可通过曲线进行调整[4]。
在系统软件框架设计时,根据DSP控制芯片的特点,设置主循环和中断2种模式。主循环模式中,主要进行状态参数的上传和SCI通讯调整、运行模式选择、行驶状态控制、油门信号采集和处理、转速采样及控制、过载保护及励磁电流的计算等。主循环中通过基准脉冲时间来设置10 ms的时间循环,达到控制目的。
在中断模式中,处理LED显示、采样和AD转换、电枢电流滞环控制及PWM输出、励磁电流闭环及PWM输出等工作。PWM的调制频率为16 kHz,即中断周期为 62.5 μs,AD采样的周期同为 62.5 μs。图 6 示出他励直流电机控制器主程序流程图。
2.2 转速处理程序设计
转速处理包括转速采样、滤波程序设计及转速PI调节三部分组成。
2.2.1 转速采样设计
转速采样是采用DSP具有的捕捉中断的方式,在主循环中进行转速传感器脉冲的采样,采样周期为10 ms,通过计数器1计算50 ms内的脉冲数,即可以计算出电机的转速,同时再结合车辆的速比等参数即可完成车速的计算。转速采样流程,如图7所示。
目前电机的转速传感器分为2对极和4对极,即电机一周对应4个脉冲和8个脉冲。转速采样的具体设置为:设置TMS320LF2407的捕捉中断I/O口,即I/O口检测到脉冲上升沿或下降沿的时候,产生捕捉中断,同时计数器加1后复位中断,等待下一次中断。然后计算在主循环模式10 ms周期中的计数值。即M法中,时间周期是50 ms,通过脉冲个数(N)、时间周期(T)和电机一周的脉冲数(S)可以计算电机转速(R/(r/min))。计算公式:R=60 000N/2ST。
转速采样的方法还有T法和M/T法[5]。
T法即计算单个脉冲的时间来进行转速采样计算。但是由于本系统中中断频率较低,同时电机转速传感器的脉冲未经分频,在低速时频率较低,周期会达到秒级,如果利用DSP的时基计数器进行计时,一级计数无法满足要求,因此算法较复杂。同时M/T法也因此无法满足采样要求。
2.2.2 转速PI控制设计
转速控制包括闭环PI控制和故障处理。由于转速开环控制时,最高车速受励磁电流的大小及采样精度影响较大,如果电机一致性差异较大时,参数设置较为复杂,必须从产品检验角度进行校正。转速闭环功能实现了在励磁电流一致性较差时,调整电枢电流的占空比来满足目标车速。
转速闭环控制的输入为油门踏板输入开度、加速率、实际车速、比例系数、积分系数及输出电流占空比,如图8所示。当输入差值为正值时,通过比例系数和积分系数进行比例积分,输出占空比不断提高,电流增大,车速变高,积分上限幅值为100%占空比输出;当输入差值为负值时,输出占空比不断降低,电流减小,车速减小和制动,积分下限幅值为0。比例系数和积分系数参数设置与车速的高低有关,如果车速接近目标车速时,积分系数调整得较小,减小超调的可能。
对于车速闭环控制,在转速反馈信号发生故障时,如果没有特殊处理时,车速会不断提高,直到飞车。因此文章提出了基于转速闭环的车速信号故障处理模式。故障模式流程,如图9所示。即故障产生的条件是实际车速为0,且电流占空比大于30%时,延时100 ms后产生转速故障;故障产生后,输入占空比大于30%时,电流占空比限幅为30%;小于30%时,电流占空比跟随输入占空比[6]。
3 基于转速闭环的上位机标定和诊断系统
3.1 通信协议
通信协议的制定在串行通信中起着重要的作用,需要软件设计时重点考虑。本系统中上位机编程诊断系统是通过RS-232串行通信与电机控制器进行通信的,上位机发送给电机控制器的指令格式,如表1所示。
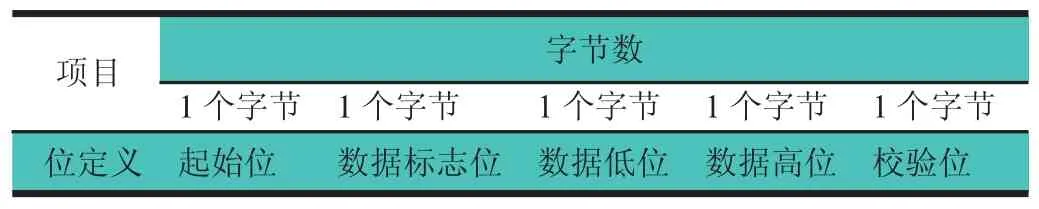
表1 他励直流电机控制器通信指令格式
为了保持程序的通用性,方便程序解析算法的研发,电机控制器发送给上位机指令格式与上述格式一致。
在发送数据时,起始位用于标志数据包的开始位置,数据标志位用于区别不同数据信息的种类,数据低位与高位共同组成了所要发送的数据,检验位计算方法为数据标志位、数据低位及数据高位三者的和。接收一方接收时,判断是否为起始位,如果正确则接收,然后按照检验位计算规则判断检验位数据正确性,如果正确则开始解析数据、显示及存储等。系统的具体通信流程,如图10所示。
3.2 标定和诊断系统上位机设计
本系统采用Visual C++6.0编写上位机的电机编程诊断系统。本系统具备串口设置、数据接收显示、参数发送及参数操作4个模块的功能。具体系统功能结构框图,如图11所示。
针对不同通信格式的系统,串口设置模块可以快速地改变上位机电脑的串口配置,与下位机配置完全相同时,即可顺利地实现上下位机之间的通信。数据接收显示模块可以实现下位机,即电机控制器传输的各种状态、参数及报警信息等,并把需要记录的数据进行保存以供查询。参数发送模块可以满足上位机对电机控制器每个参数的编程,以及整组参数的复制发送功能,快速的复制目标控制器参数到客户机中,大大地提高工作效率。参数操作模块可以实现对控制器参数的整体读取,对编程诊断系统中显示的参数进行保存,加载已经保存的整组参数等功能[7]。
电机控制器编程诊断系统显示界面,如图12所示。
4 结论
文章提出的研究应用到低速纯电动车产品已经完成了小批量产品的试用,通过产品一致性、可靠性及强化测试后证明文章提出的方案具有可观的前景。同时基于转速闭环的低速纯电动车电机控制器解决了开环控制器鲁棒性差和起步抖动的问题,并自动调整参数进行自适应控制,有效地提高了控制器的性能,优化了低速电动车的可靠性,有力地提高了国内电动车控制器的水平。
