基于TMS320C2000系列DSP的步进电机控制方法研究
2015-08-27朱成喜
朱成喜
(江苏理工学院电气信息工程学院,江苏 常州213001)
0 引言
目前步进电机在数字控制系统中已经应用得十分广泛,驱动步进电机的电脉冲信号也可以由很多种方式来产生,比如单片机、PLC等控制芯片产生脉冲信号,但这些方法可能存在输出电脉冲不稳定、可调节性差等缺点。因此,本文研究设计了一种使用TMS320C2000系列DSP控制步进电机的方法,基于DSP的事件管理器产生占空比可调的PWM波功能,对四相步进电机采用四相八拍的通电方式,利用输出PWM波的顺序和调节PWM波的频率来调节电机的转向和转速,以达到稳定控制步进电机的目的。
1 步进电机控制原理
本系统控制对象以 M35SP-7N为例,其步进角为7.5°,是一种单极性的四相五线步进电机。它的引脚与线圈对应关系如图1所示。
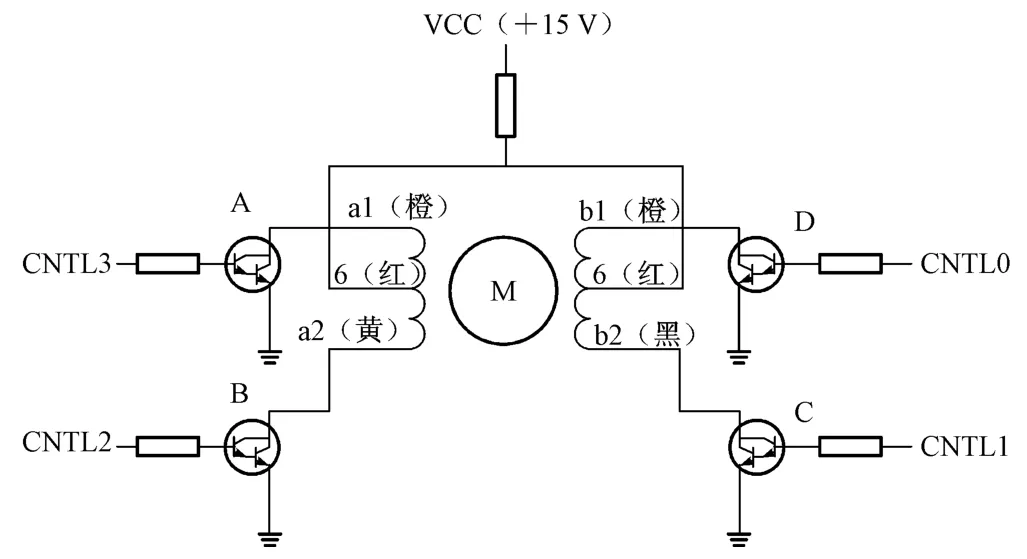
图1 M35SP-7N引脚与线圈的对应关系
步进电机的A、B、C、D四相分别对应DSP的引脚PWM1、PWM2、PWM3和PWM4。步进电机的控制一般分为四相四拍和四相八拍两种方式,我们使用DSP的事件管理器来产生步进电机的脉冲信号。
2 DSP控制信号原理
TMS320C2000内设有事件管理器EV,事件管理器的比较单元可以产生占空比可调的PWM波。其中比较单元1可产生两路互补的PWM1和PWM2波形,比较单元2可产生两路互补的PWM3和PWM4波形。我们可以利用PWM1、PWM2、PWM3和PWM4这四路PWM波为步进电机产生脉冲信号。
比较单元1和比较单元2全部使用定时器T1作为时基,使定时器T1工作在连续增计数模式。图2为比较单元1产生PWM1和PWM2的原理。
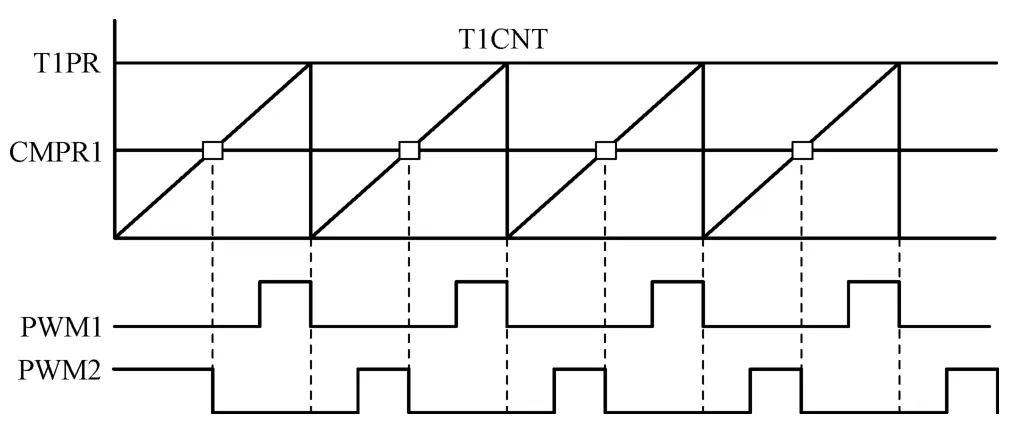
图2 比较单元1产生PWM波原理
比较单元2利用比较寄存器CMPR2与T1CNT的比较匹配点产生PWM3和PWM4波。原理与比较单元1相同。
由于使用比较匹配点产生的PWM波都是互补的波形,不会产生四相四拍的脉冲波形,所以我们使用比较单元的强制电平高和强制电平低来产生。此功能由事件管理器EVA的比较行为控制寄存器A来完成。产生四相PWM脉冲的原理如图3所示。
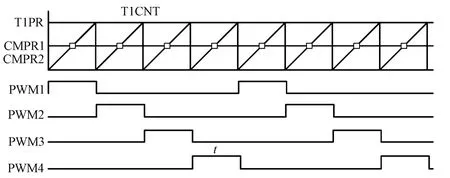
图3 四相PWM脉冲产生原理
脉冲的高电平时间t即为PWM波的周期T,即:

式中,T1PR为周期寄存器的值;T1CLK为计数脉冲的周期。
由式(1)可知,通过改变T1CLK和T1PR的值即可改变脉冲的频率。并且在编程时,也可改变PWM波高电平的宽度,从而使脉冲的频率进行整数倍的分频。即脉冲的脉宽t为:

本系统控制对象以 M35SP-7N为例,其步进角为7.5°,即电机运行一周需要的脉冲数为:

由式(2)和(3)可得电机的转速n(r/min)为:

由式(4)可知,可以通过调节周期寄存器T1PR的周期值、计数时钟脉冲T1CLK的频率以及分频数j的值,达到指定的转速。
3 系统的软件设计
系统主要完成步进电机的转向、转速和位置调节,程序流程如图4所示。
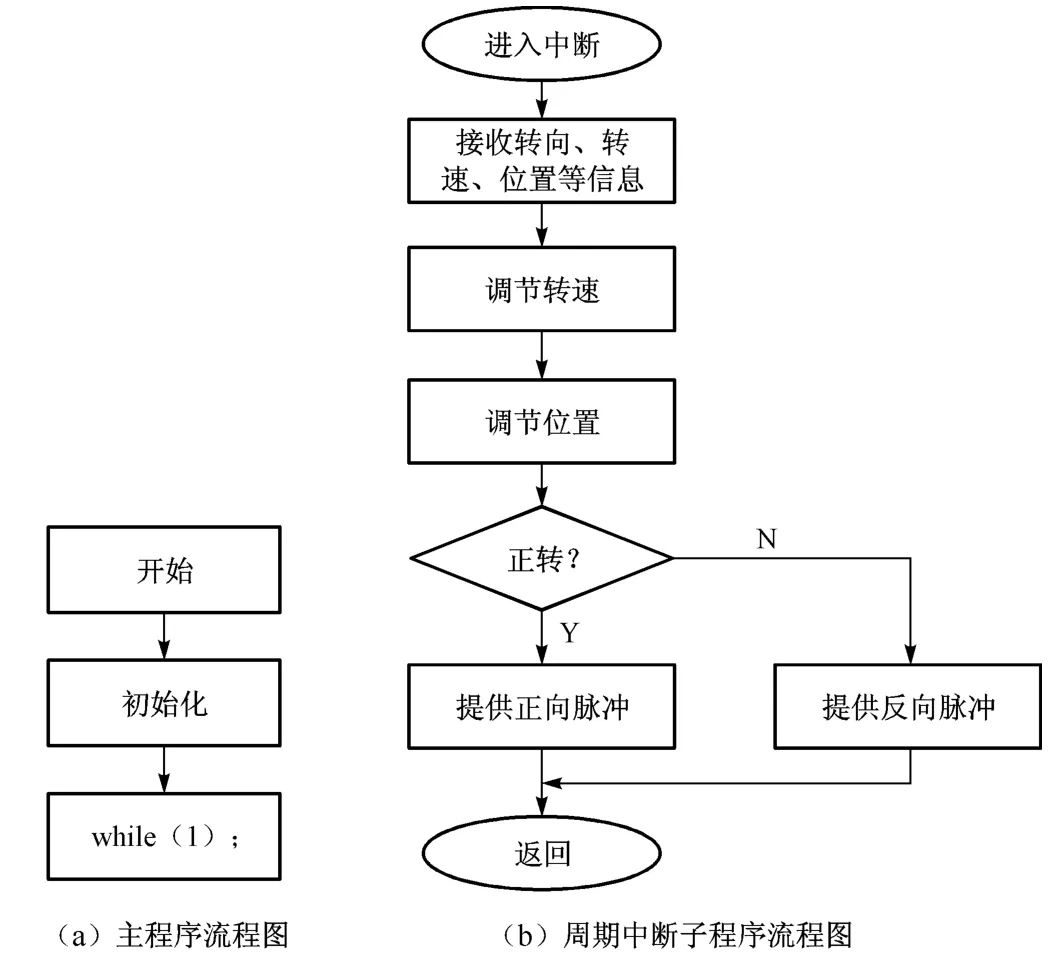
图4 系统程序流程图
系统程序主要分为主函数流程图和中断子程序流程图。其中主程序主要完成一些初始化的操作,包括系统控制初始化、事件管理器初始化、GPIO初始化、各中断初始化等。初始化结束后,程序进入死循环,等待周期中断。每隔一定时间,程序便会进入周期中断子程序,它主要完成电机转向、转速及位置的调节。电机的转向通过提供正向或反向脉冲进行调节,转速通过设置T1PR、T1CLK和j的值调节,而位置通过提供给电机特定的脉冲个数来调节。
4 结语
本文主要研究设计了一种使用TMS320C2000系列DSP控制步进电机的方法,基于DSP的事件管理器产生占空比可调的PWM波功能,利用输出PWM波的顺序和调节PWM波的频率来调节电机的转向和转速,以达到稳定控制步进电机的目的。
[1]顾卫钢.手把手教你学DSP——基于TMS320X281x[M].北京:北京航空航天大学出版社,2011.
