单神经元PID 模糊控制在水位系统中的建模与仿真
2015-08-26金林骏方建安潘磊宁
金林骏,方建安,潘磊宁
(东华大学 上海201620)
随着计算机技术和信息技术的发展,过程控制系统在工业过程中显得更加重要。 水箱液位系统是工业控制中常见的一种控制系统,其在日常生活和工业生产中都有着广泛的应用。 液位可以直接观察及测量并可以组成各种形态,并具有滞后时间长的特点,对其控制通常采用传统PID 控制。PID 控制器因为其使用方便,原理简单,适应性强,其控制对被控对象的变化不太敏感等特点, 被广泛应用于工业过程控制中。但是由于水箱水位系统的滞后性和多变性, 传统的PID 控制器就无法对其进行精确的控制,所以本文提出了单神经元模糊PID 的控制方法。 由于神经网络具有自适应、自学习、自组织的能力, 运用单神经元模糊自适应PID 控制器这种控制模型,对水箱水位进行控制取得良好的控制效果。文中将其与传统的PID 进行了比较,并进行了MATLAB 仿真[1]。
1 水箱液位系统的建模
水箱可以通过开闭各个水箱的阀门组合成不同的液位控制系统,这里采用上、下水箱结构,组成一个由两个一阶系统串联形成的二阶系统[2]。 系统结构如下图1 所示。
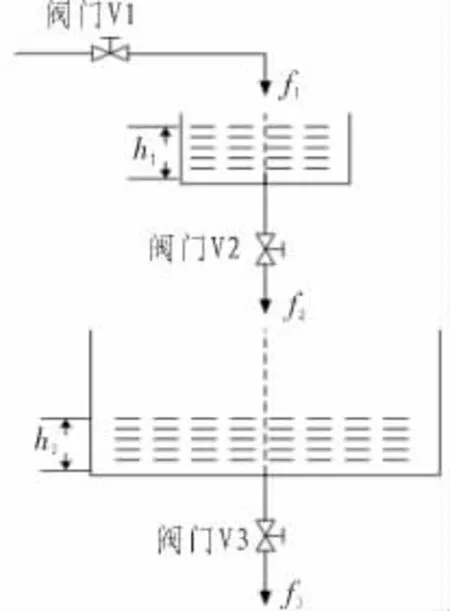
图1 水箱的结构原理图Fig. 1 Structure diagram of water tank
上图中f1,f2,f3分别表示上水箱的进水流量, 上水箱的出水流量(即下水箱的进水流量),下水箱的出水流量。 h1,h2分别表示上、下水箱的液位高度。 设上、下水箱的横截面积分别为L1,L2,其值可以直接测量得到;阀门V2 和V3 的液阻分别为R1,R2,可通过控制阀门来调节其值大小[3]。 根据原理图可建立如下的动态平衡方程:

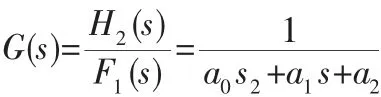
对方程组两边取拉普拉斯变换,消除中间变量,计算后得到系统的传递函数如下,其输入量为f1,输出量为h2。
2 单神经元模糊PID 控制器的基本原理
单神经元模糊PID 控制是在神经元控制基础上,加入了模糊控制对参数k 进行在线调整, 是一种使系统响应速度更快、稳定性更高的控制策略。
2.1 单神经元PID 的控制策略
单神经元PID 控制是不断调整加权系数W 来使系统达到稳定的状态的一种控制策略,一般主要有3 种学习规则[4]:
1)无监督Hebb 学习规则
如果两神经元被同时激活,则它们连接强度的增强与他们激励的乘积成正比,分别用Oi,Oj 表示神经元i 和i 的激活值。 用Wij 表示神经元i 和j 的连接权值,则学习算法如下:

其中h 为学习速率。
2)有监督的Delat 学习规则
在hebb 学习规则中引入教师信号,将输出信号Oj 换成输出期望值dj 与实际输出Oj 的差值,其学习算法如下:
DWij(k)=h*(dj(k)-Oj(k))*Oi(k);
3)有监督的Hebb 学习规则
将无监督的Hebb 学习规则和有监督的Delat 学习规则结合到一起就是有监督的Hebb 学习规则,其学习算法如下:
DWij(k)=h*(dj(k)-Oj(k))*Oj(k)*Oi(k);
这里运用有监督的Hebb 学习规则,控制结构如图2。
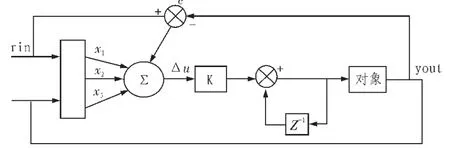
图2 单神经元pid 控制器结构Fig. 2 Single neuron PID controller structure
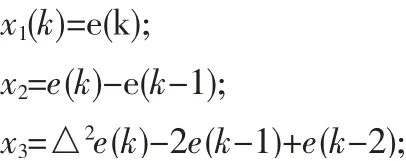
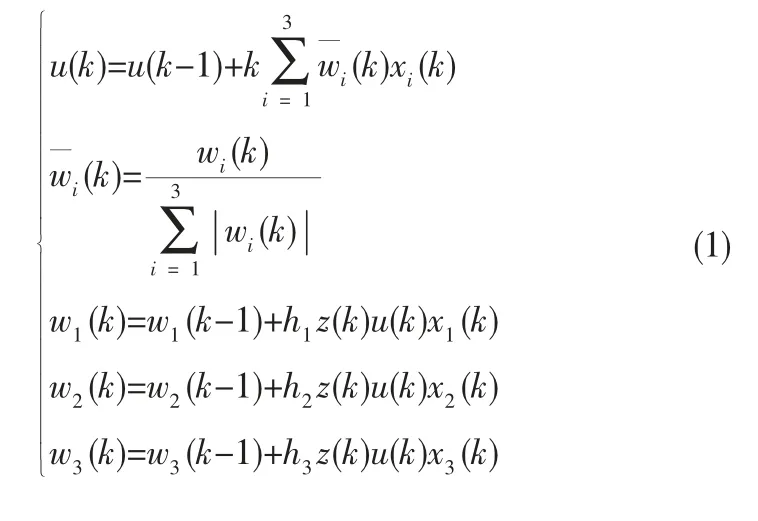
对其进行规范化处理,如右方程组(1)所示:
式中的x1,x2,x3分别为:
2.2 模糊控制的基本原理
模糊控制器就是以系统误差e 和误差的变化率ec 作为模糊算法的输入,以需要的控制量作为模糊输出,并对其进行在线修改。
模参数糊自整定是找出控制量参数的变化量与误差e 和误差变化率ec 之间的模糊关系,在运行过程中不断得检测误差e 和误差变化量ec,根据相对应的模糊控制原理来对控制量的参数进行在线自整定, 以满足系统不同时间及状态条件下对控制量参数的不同要求。 其核心是总结根据以往大量的的实际经验,建立起一套合适的模糊规则表。
2.3 单神经元PID 模糊参数自整定的控制策略
在单神经元控制中,增益k 对控制器的影响比较大。k 值较小时,能保证系统的稳定性,但如果k 值太小,系统的响应速度会降低;k 值较大时,能使系统的响应速度加快,但同时系统的超调量变大,可能导致系统不稳定的现象发生。 因此,可以采用模糊算法来对k 进行在线调整,使系统既能稳定,同时也可提高系统的响应速度。 单神经元模糊PID 结构如下图3 所示。
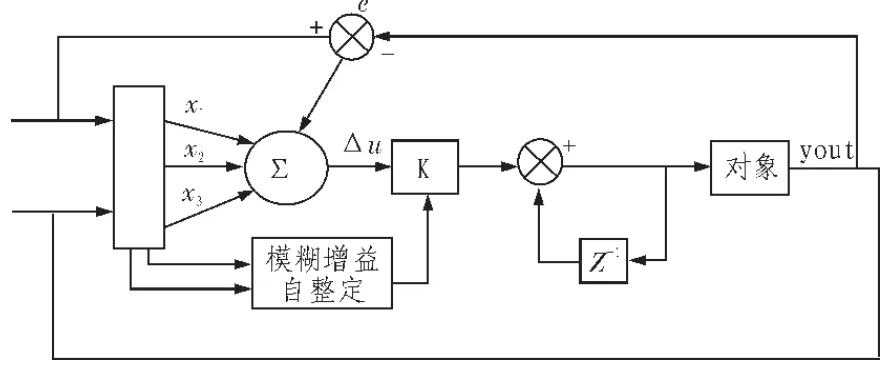
图3 单神经元模糊PID 控制器结构Fig. 3 Single neuron fuzzy PID controller
其模糊规则表为:
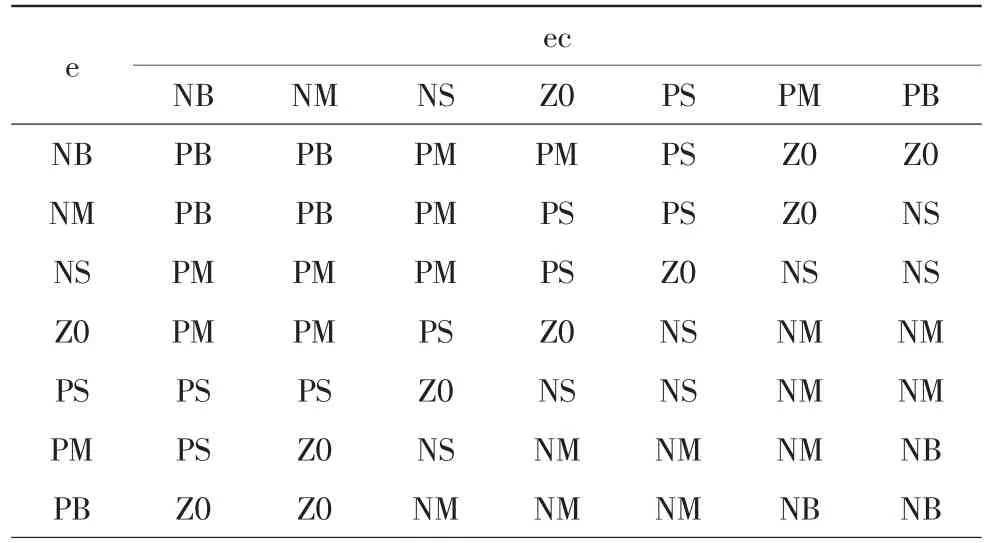
表1 K 的模糊规则表Tab.1 K fuzzy rule table
将系统误差e 和误差率ec 的变化范围定义为模糊集上的论域,如下所示:e,ec={-5,-4,-3,-2,-1,0,1,2,3,4,5};
其模糊子集为e,ec={NB,NM,NS,ZO,PS,PM,PB},子集中的各个元素分别表示负大,负中,负小,零,正小,正中,正大。在此系统中设定系统误差e,误差变化率ec 和k 均服从正态分布,可以得出个模糊子集的隶属度[5],查表得出参数k 的增量并带入下式计算:
使参数k 在不同时刻在一定范围内自动调整,达到了在线自整定的效果。
3 单神经元PID 模糊参数控制在水箱水位上的MATLAB 仿真
用S 函数对单神经元模糊控制器的学习算法进行实现,在控制器中取神经元权值的初始值分别为0.3,0.3,0.3,神经元比例系数初始值k=20[6]。
将器得到的仿真结果与传统PID 的仿真结果相比较,效果图如图5 所示。
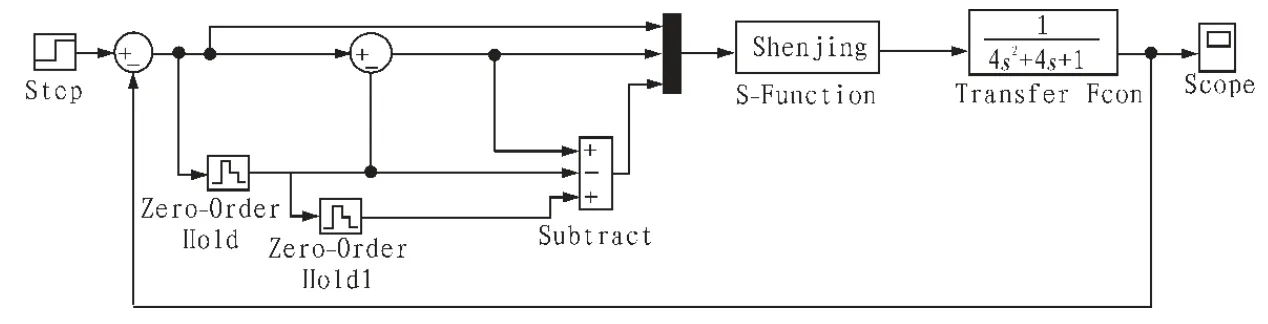
图4 单神经元模糊PID 控制器仿真的结构图Fig. 4 Structure diagram of fuzzy single neuron PID controller simulation
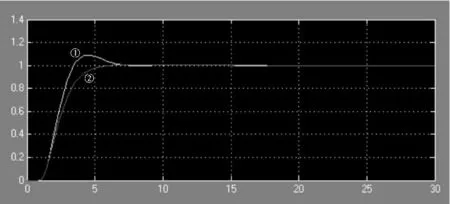
图5 系统仿真图Fig. 5 System simulation diagram
图5 中,①为传统PID 控制曲线,②为单神经元PID 模糊控制曲线,其中Kp、Ki、Kd 分别取值5,1,2。 不难看出,在相同的条件下,传统PID 的波形在开始有一些震荡,并且经过十几秒后才能达到稳定,而采用单神经元模糊PID 控制则几乎没有超调量的产生,并且六秒后就可达到稳定,这些都说明了单神经元模糊PID 控制无论是在水箱液位的启动快速性上还是在鲁棒性上都取得了很好的效果。
4 结论
本研究结果说明了单神经元模糊PID[7-8]控制器在水箱液位的控制上有着更好的效果, 改进了传统水箱液位控制的稳定时间长、超调量大的缺点,使水箱水位调节的稳定时间比传统PID 缩短了50%,超调量也几乎没有。
[1] 李小平. 液位控制系统建模及其控制算法的研究[D].哈尔滨: 哈尔滨工业大学,2007.
[2] 杨旭,周悦,于广平.水箱液位控制系统的设计与研究[J].制造业自动化,2011(8):128-130.YANG Xu,ZHOU Yue,YU Guang-ping. Research and design of water tank liquid level control system [J]. Manufacturing Automation,2011,33(8):128-130.
[3] 张学燕, 张建峡. 单神经元自适应PID控制器的研究及MATLAB仿真[J].自动化技术与应用,2007,26(9):52-53.ZHANG Xue-yang,ZHANG Jian-xia.Research and MATLAB simulation of single neuron adaptive PID controller[J]. Technology and Application of Automation,2007,26(9):52-53.
[4] 刘金琨.先进PID 控制MATLAB仿真[M].2版.北京:电子工业出版社, 2004.
[5] 王朝宁.基于ARM7参数自整定模糊PID控制器设计及其应用[D].北京:北京交通大学,2010.
[6] 任颖莹. 地源热泵空调系统的模糊增益单神经元PID控制方法[D].郑州:郑州大学,2013.
[7] 李娟.一种基于前馈补偿的PID轨压控制设计方法[J].电子科技,2014(6):146-149.LI Juan.A design method of PID accumulator control based on feedforward compensation [J].Electronic Science and Technology,2014(6):146-149.
[8] 李国柱.基于改进量子进化算法的PID参数优化[J].现代电子技术,2012(16):104-106.LI Guo-zhu.Optimization of PID controller parameters based on improved quantum inspired evolutionary algorithm [J].Modern Electronics Technique,2012(16):104-106.