基于模糊神经网络的AUV航迹规划❋
2015-08-07刘洲洲
刘洲洲
(西安航空学院,西安710077)
基于模糊神经网络的AUV航迹规划❋
刘洲洲
(西安航空学院,西安710077)
自主式水下机器人Autonomous Underwater Vehicles(AUV)是对深水环境进行开发和探测的重要工具。将模糊逻辑和人工神经网络相结合,形成模糊神经网络系统,并增加了神经网络辨识器,使其具有先进的知识学习能力和并行数据处理能力,提高了AUV航迹规划时的自适应性,然后通过仿真实验证明了其优越性。
航迹规划;模糊逻辑;人工神经网络;模糊神经网络
1 引 言
自主式水下机器人AUV(Autonomous Underwater Vehicles)是对深水环境进行开发和探测的重要工具。如何对AUV进行航迹规划已经成为学术界的研究热点。
神经网络具有优秀的自适应学习和并行计算能力,模糊集则具有近似人的If-then模式的思维和推理规则。模糊集最早是由S.C,Lee和E.T.Lee于1974年引入神经网络的,YamaKawa于1993年提出了模糊神经元的概念,并开启了研究模糊神经网络的时代[1]。
这里将模糊逻辑和人工神经网络相结合,形成模糊神经网络控制器(FNNC),增加了神经网络辨识器,使其具有先进的知识学习能力和并行数据处理能力,提高了AUV航迹规划时的自适应性,并通过仿真实验证明了其优越性。
2 模糊神经网络
神经元的基本模型如图1所示,为非线性的多输入单输出模块[2],可用式(1)表示。

图1 神经元的基本模型

2.1 模糊神经网络结构
网络采用多层前向网络结构,共有五层,如图2所示。
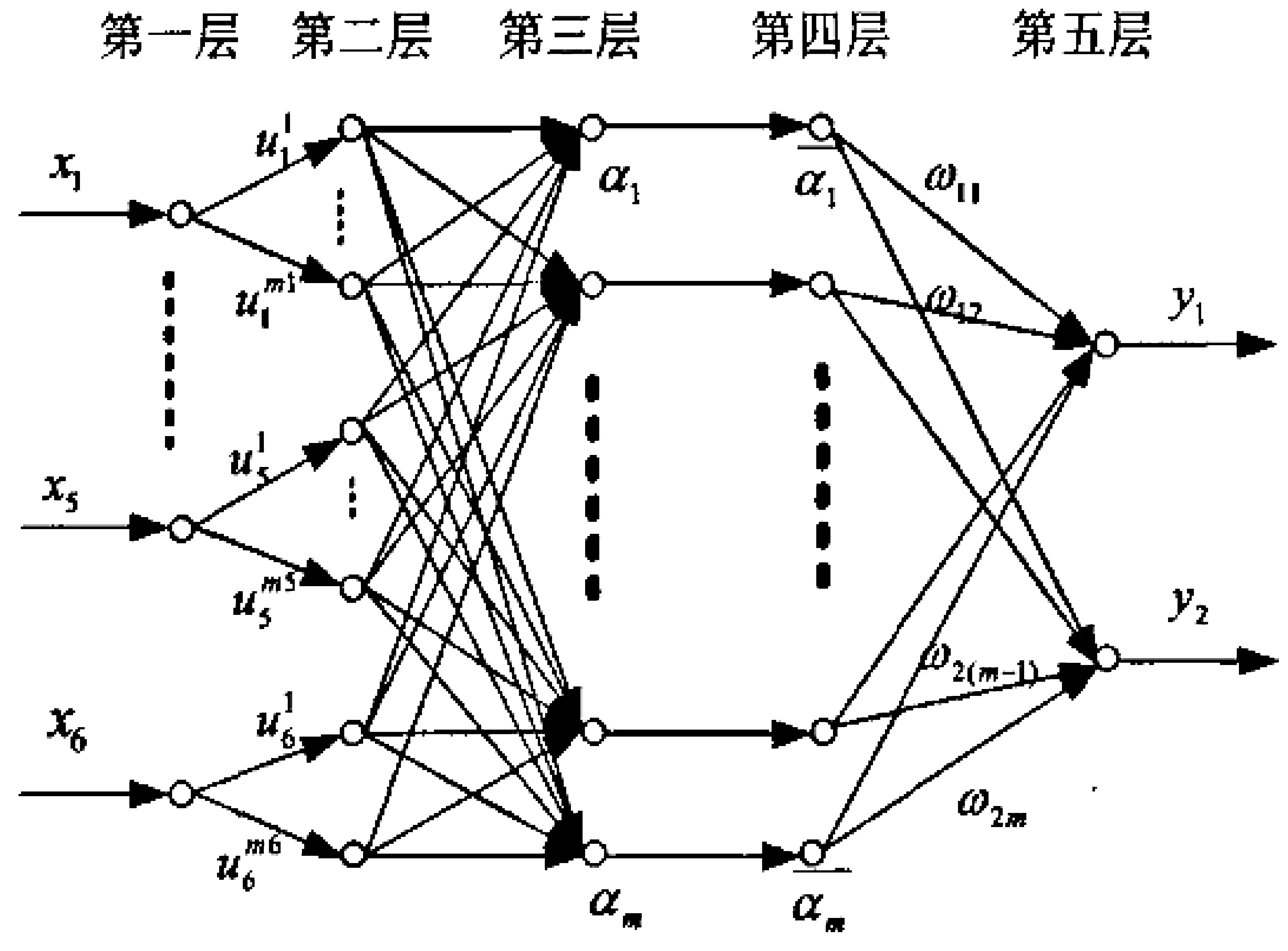
图2 模糊神经网络结构图

第一层:输入层。作用是将输入变量传递到下一层,这里共有6个输入语言变量,即=xi,且连接权是1。
第二层:模糊化层。作用是模糊量化所有输入变量。这里用高斯函数作为径向基数,即:

第三层:规则层。本层的节点均为规则节点,用于表示模糊逻辑规则。作用是各条规则的适应度计算,各节点进行如下操作:

本层的连接权设为1。
第四层:本层的网络结构用来定义各个规则节点,并对其结论进行归一化,即:

第五层:输出层,输出控制规则。

2.2 模糊神经网络辨识器设计
为了预测神经网络的控制效果,引入了神经网络辨识器,以提高学习收敛速度和系统稳定性[4]。当模糊神经网络系统进行辨识时,采用下式:

其中,u(k)和y(k)分别代表系统的输入和输出,f{.}是非线性函数。
为保证系统的稳定性,采用串-并联模型:

离线学习的信号集为:

其中,X(k)={y(k),y(k-1),...,y(k-n+1),u(k),u(k-1),...,u(k-m+1)};u(k)为激励信号;Rand(1)表示[-1,1]之间均匀分布的随机数;A表示信号幅值。
2.3 学习方法
代价误差为:

其中,ydi为期望输出值,yi表示实际输出值。
各层的节点函数计算如下[5]:
第一层:

第二层:

式中,i=1,2,...,6;j=1,2,...,mi
第三层:

第四层:

第五层:

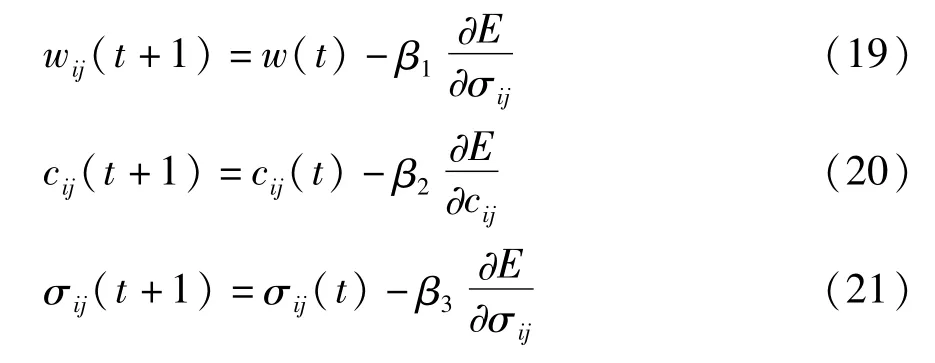
参数调整的算法如下[6]:
3 基于模糊神经网络的AUV航迹规划
3.1 环境信息的处理
实验中,AUV必须先探测障碍信息,本实验用5个声纳传感器,各传感器相邻夹角为30度。

图3 传感器分布图
目标点P(Xs,Ys),机器人位置(x,y)。则:

机器人与目标点的相对角度为:

3.2 仿真实验
采用上述算法进行仿真实验,设学习速率β1=β2=β3=0.5,根据障碍物的密集程度不同,分别进行实验,仿真结果如图4-图6所示。

图4 环境1仿真图
可以看出,AUV成功避开了障碍物,顺利到达目标点,验证了算法的可行性和优越性。
4 结束语
神经网络具有优秀的自适应学习和并行计算能力,模糊集则具有近似人的If-then模式的思维和推理规则。这里将两者相结合,形成模糊神经网络控制器(FNNC),其具有先进的知识学习能力和并行数据处理能力,提高了AUV航迹规划时的自适应性。并通过仿真实验证明了其优越性。
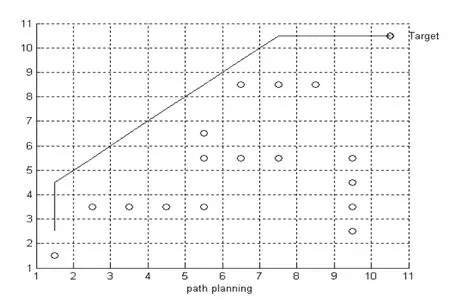
图5 环境2仿真图

图6 环境3仿真图
[1] 张福斌.水下航行器导航系统设计及误差分析[D].西安:西北工业大学,2002.
[2] Hagen,Anonsen,ManetM.The HUGIN real-time terrain navigation system[C].Oceans 2010.Kjeller,Norway 2010:1-7.
[3] 王越,曹长修.BP网络局部极小值产生的原因分析及避免方法[J].计算机工程,2002,28(6):35-37.
[4] Chin Tengline,C.S.Geroge Lee.Neural network based fuzzy logical control and decision system[J].IEEE Trans.On Computer,1991,40(12):1320-1326.
[5] Du Toit,Burdick JW.Robotmotion planning in dynamic uncertain environments[J].IEEE Transactions on Robotics,2012:101-115.
[6] Pepijin W J,Daniel Toal,Neural networkcontrol of underwater vehicles[J].Engineering Application of Artificial Intelligence,2005(18):533-547.
AUV Path Planning Based on Fuzzy Neural Network
Liu Zhouzhou
(Xi’an Aeronautical University,Xi’an 710077,China)
Autonomous Underwater Vehicles(AUV)is a kind of economical vehicle for detecting and exploring the underwater resource.Combined the fuzzy logic with artificial neural network,the fuzzy neural network system is formed and the neural network identifier is added.The system has the advanced capabilities of learning and processing for the parallel data.Italso improves the adaptability of AUV track planning and the simulation test proves its superiority.
Path Planning;Fuzzy Logic;Artificial Neural Network;Fuzzy Neural Network(FNN)
10.3969/j.issn.1002-2279.2015.03.013
TP24
A
1002-2279(2015)03-0043-03
国家自然科学基金资助项目(61103242)
刘洲洲(1981-),男,山西运城人,博士研究生,讲师,主研方向:传感器网络,系统仿真。
2014-08-11
