气体传感器脉宽恒温控制电路设计
2015-08-07董克冰曹勇全张建国程文进杨成佳
董克冰,曹勇全,张建国,程文进,景 涛,杨成佳
(1.中国电子科技集团公司第四十八研究所,长沙410111;2.中国航天员科研训练中心,北京100094)
气体传感器脉宽恒温控制电路设计
董克冰1,曹勇全1,张建国1,程文进1,景 涛1,杨成佳2
(1.中国电子科技集团公司第四十八研究所,长沙410111;2.中国航天员科研训练中心,北京100094)
针对薄膜气体传感器敏感芯体的气体温度特性,设计了一种实用的脉宽恒温控制电路。采用经典PID控制模式,自适应调节加热功率,满足高温高湿的环境要求。样机器件全部采用有失效率指标的高等级质量国产元件,可靠性完全可估。样机对启动电流、最高温度等最坏情况做了特别设计,同时为了有效降低失效率,对有效工作模式做了规定以适合高可靠性、低风险的航天应用要求。实验数据表明氢气传感器控温电路精度可达0.15℃,可满足传感器精度要求。
经典PID控制;脉宽调制;温度控制;气体传感器
1 引 言
在半导体电阻式气体传感器中,气敏芯体对温度非常敏感[1],在整个工作环境温度波动范围内温度噪声通常会完全掩盖气体浓度输出的有效信号。另外气体传感器大多利用化学反应性质测量气体浓度,化学性质通常与温度有关,为了获得最佳响应特性,敏感芯体通常需要工作在特定温度,因而为气敏芯体提供恒定的工作温度环境显得非常有意义。
在电路设计理论里实现恒温控制的方式有很多,传感器的特殊应用决定了低功耗、高精度、高可靠性的分立模拟电路实现方案非常适合。PID脉宽控制恒温模拟电路具有非常好的控温精度,同时元器件简单且具有可靠的失效率参数,风险可控,非常适合航天产品的设计要求。
2 电路框图
传感器芯体上面集成了测温电阻与加热电阻,测温电阻能实时监测传感器芯体的当前温度,且反馈到控制电路的输入端,作为温度误差信号的一个输入端,形成闭环控制。
电路框图如图1所示,测温电路把当前芯体温度值转化为电压值,该值是一个微弱信号值,必须经过高信噪比前置放大电路放大到合适的电压输出值,再经过系统放大,然后输送给PID环节进行控制输出,控制输出产生宽度可调脉冲信号驱动加热电路,给传感器芯体加热。传感器当前温度与设定温度温差值越大,误差电压信号越大,经过PID控制输出脉宽开通时间越长,加热功率越大,反之亦然,从而实现了恒温控制。
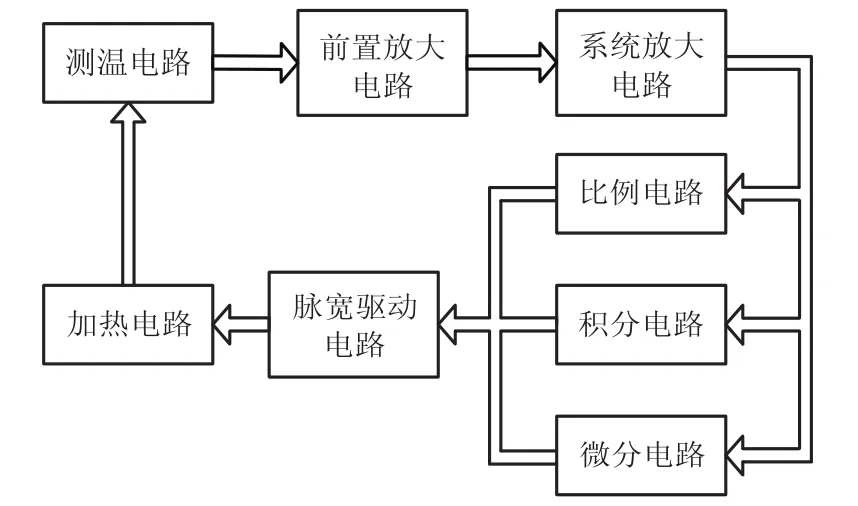
图1 恒温控制电路框图
3 系统控制设计
3.1 温度与加热功率
传感器芯体温度与加载在芯体上的正热能与负热能大小有关。若传感器芯体温度维持在环境温度以上,则传感器芯体加载的正热能来自电能,由焦耳定律可以知道若给定电阻R上加热电流为I,加热时间为T,那么有I2*R*T的电能转换成热能;而传感器芯体加载的负热能可以是传感器芯体与周围环境的温度差而产生的热对流及热传导带来的热能转移。这种正热能与负热能对温度的影响体现为传感器芯体的加热功率与制冷功率,它们共同决定了传感器芯体的稳定温度。假设传感器芯体工作环境温度为25℃,传感器芯体气体浓度响应最佳温度为80℃,因热传导和热对流损失的负热能为某个可测量值且保持恒定,那么该点环境下芯体温度只与加热功率有关。如上所述,给芯体合适电流,那芯体就可以维持设定点温度,若环境温度上下波动,芯体加热与制冷的功率随温度发生变化,要使芯体继续维持在设定点温度,只需要调节芯体上电流的大小。在25℃环境下,实际测得加热功率与芯体温度的关系如图2所示,加热功率为0.45W时芯体即可稳定工作在设定温度80℃。
3.2 温度测量
为了更加准确地测量敏感芯体温度场的温度,在氢敏芯体上集成了一个测温电阻与一个加热电阻。测温电阻、加热电阻和氢敏电阻版图设计经过温度场仿真实现最佳耦合。因而测温电阻能真实反映氢敏电阻当前工作温度。测温电阻材料采用高纯铂电阻镀膜而成,实际测试的测温电阻温度特性如图3所示,从图中可以看出测温电阻具有良好的温度线性关系。该测温电阻的温度系数因为采用薄膜沉积工艺制备,温度系数没有标准PT100大,但并不影响使用。
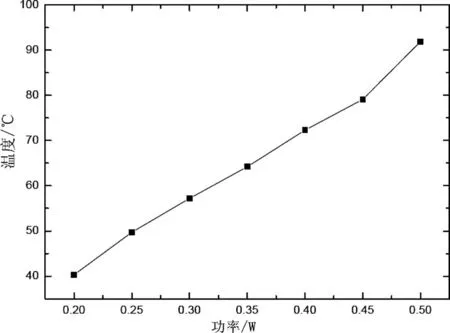
图2 芯体加热功率与温度曲线
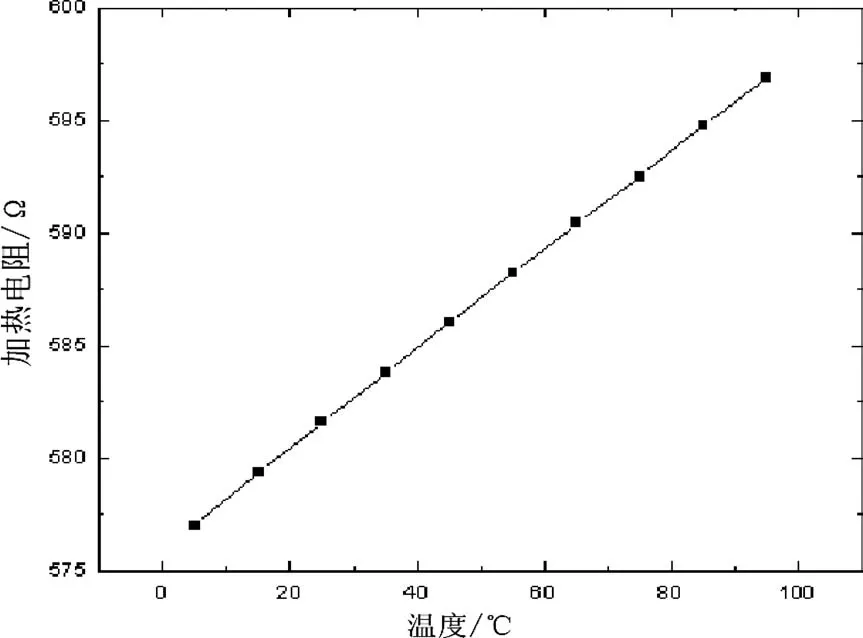
图3 测温电阻阻值随温度变化曲线
电阻经过测温电桥检测,输出反映温度的电压信号。这个信号在控制区域非常微弱,为了提高温度测量精度,采用四线制检测电路,减少测温铂电阻引线长度与铂电阻通电电流对温度测量的影响。
3.3 温度控制环路[2]
通常温度系统是大惯性系统,具有较大的滞后性,往往需要具有超前调节的微分环节。气体传感器芯体体积很小,无论是加热还是制冷,芯体对温度都有快速响应,采用比例积分[3]控制就可以获得不错的效果。
3.3.1 比例环节
比例环节具有快速调节能力,比例系数越大静差越小,过大容易震荡。电路如图4所示,其增益为-RP1/RP2,试验测试比例系数为-4时控制效果较好。
3.3.2 积分环节
积分环节可以消除系统静差,当系统有稳态误差时,积分环节的输出会持续增大使得控制作用加强,从而减小稳态误差。积分系数越小,积分作用越明显,控制精度越高。积分电路如图5所示,其增益为-1/RI1*CI1*S,其中S为拉式算子。经调整时间常数RI1CI1为4.7s比较合适。
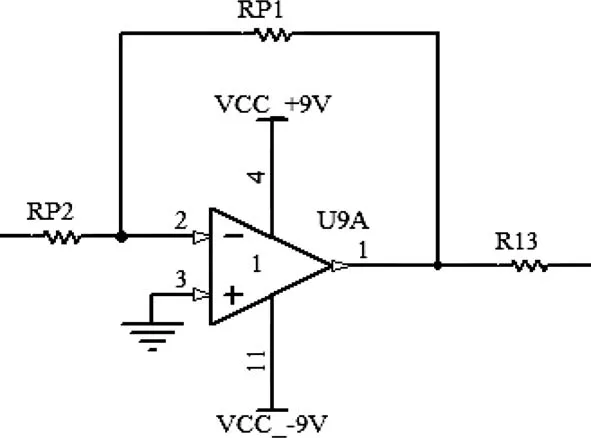
图4 比例电路
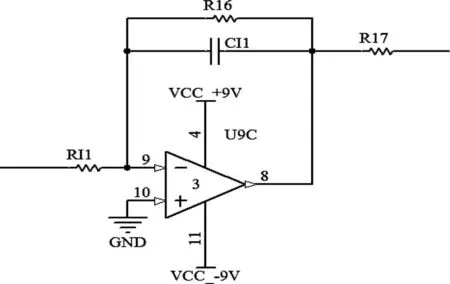
图5 积分电路
3.3.3 微分电路
微分环境对输入快速变化的情况具有较大的反应输出,能提高控温系统对环境温度波动的快速响应能力。微分环节具有超前调节的作用,具体电路如图6所示。
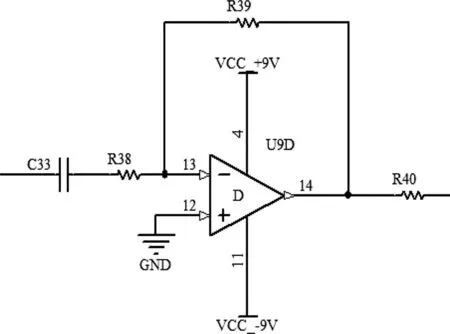
图6 微分电路
3.3.4 PWM产生电路
PWM电路[4]采用简单分立器件搭建,具体电路如图7所示,主要构成有比较器产生限阈值翻转波形,然后经过积分电路充放电产生标准锯齿波,锯齿波在与PID环节输出电压比较,产生脉宽随温度误差调整的波形,该波形输出给驱动加热电路。
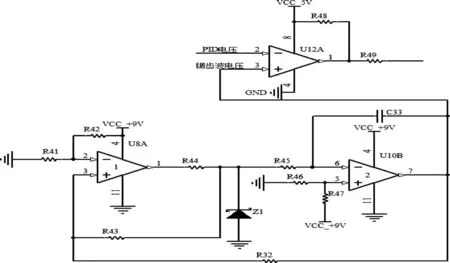
图7 PWM电路
采用PWM通断控制模式,能最大化利用加热功率。在导通瞬间,加热电压完全加载在加热电阻上,电流峰值会比较大,因此需要控制加热电阻合适的阻值。另外PWM控制存在完全导通的情况,虽然在本电路应用中不会带来坏的影响,但是为了调整最大加热功率以达到控制最大加热温度的目的,在PID输出环节采用稳压二极管,控制PID输出电压的幅度,保证PWM能够输出一定宽度的死区。
4 实验结果
样机进行了稳定动态过程的短时间测试和稳定点长时间测试。短时间测试样机温度曲线如图8所示,其中可以看出样机到达温度设定点90%的时间非常短,大概为120s,整体控温精度在0.15℃以内。当环境温度波动时控温点会随着扰动,很快就能回到设定的温度值,动态响应非常快。
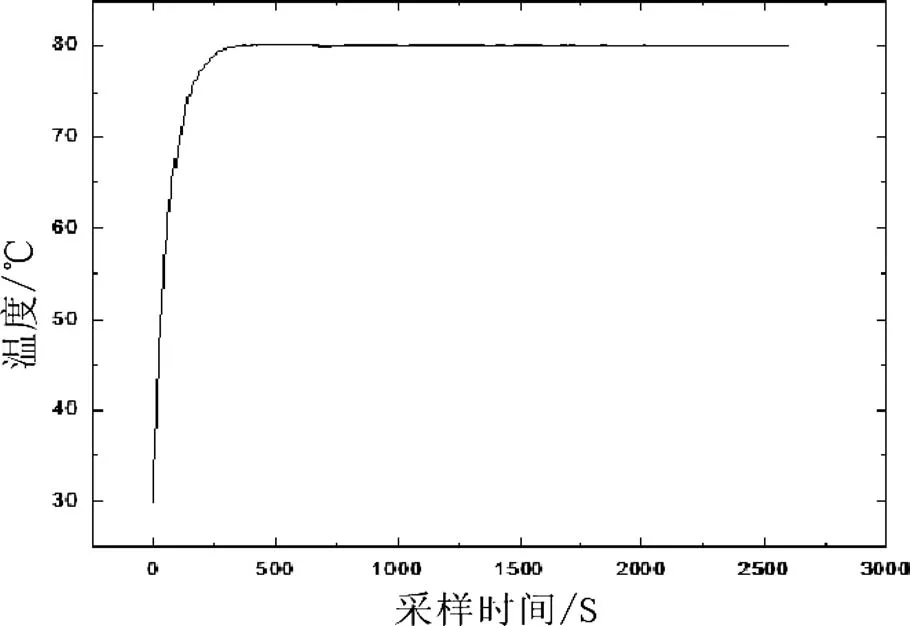
图8 控温稳定过程
样机控温效果稳定点长时间监测曲线如图9所示,从该图可知整体控温精度在0.15℃以内更加明显,说明样机电路控温点不会随时间飘移,也不随环境缓慢变化的温度波动漂移。
5 结束语
PID脉宽温度控制电路,所用元器件较少,调节简单,控制精度可以达到±0.15℃,完全满足气体传感器应用需求。在可行性、可靠性、安全性方面特别适合航天产品的需求,可在气体传感器中应用推广。
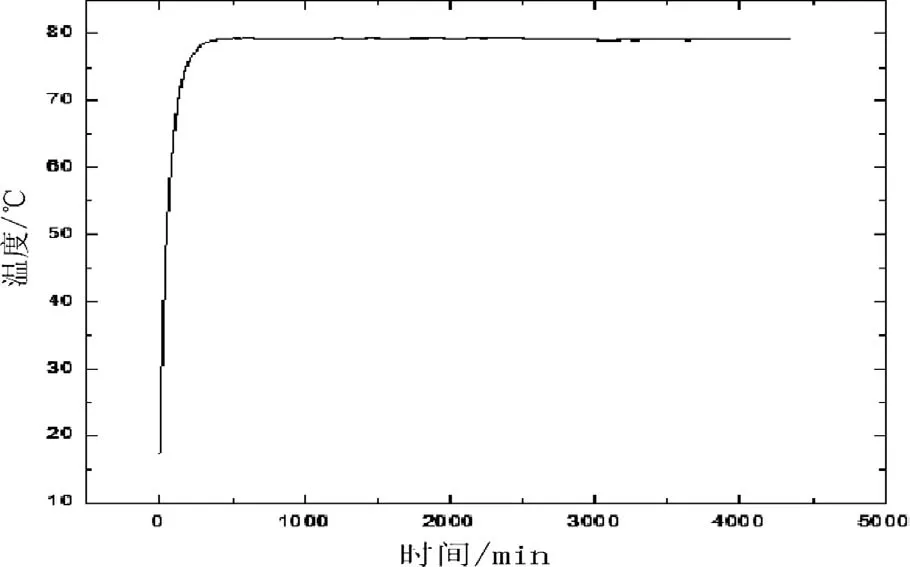
图9 长时间稳定性
[1] RaviPrakash Jayaraman.Thin film hydrogen sensors:a materials processing approach[D].Pennsylvania.Pennsylvania State University,2002.
[2] 李宝仁,张理,杜经民.基于模糊控制的气体温度控制系统的研究[J].液压与气动,2005(7):1-3.
[3] 胡寿松.自动控制原理[M].北京:科学出版社,2007.
[4] 童诗白.模拟电子技术基础[M].北京:高等教育出版社,2007.
Design on Pulse-W idth PID Tem perature Control in Gas Sensor
Dong Kebing1,Cao Yongquan1,Zhang Jianguo1,ChengWenjin1,Jing Tao1,Yang Chengjia2
(1.The48th Research Institute of China Electronics Technology Group Corporation,Changsha 410111,China;2.Astronaut Center of China,Beijing 100094,China)
A practical temperature control circuit is designed especially for gas sensor according to properties of the thin sensitive core films.The classical PID controlmode is adapted to adjust the heating power and meet the environmental requirements of high temperature and high humidity.All domestic components have failure rate,so the reliability of the prototype can be estimated.The prototype is especially designed for the worst situations of starting current and maximum temperature.The prototype is also recommended for the normal work mode to reduce the failure rate.The experiments data show that the hydrogen sensor temperature control circuit precision can reach 0.15 degrees,which meets the requirement of the hydrogen sensor.
PID;PWM;Temperature control;Gas sensor
10.3969/j.issn.1002-2279.2015.01.021
TN7
B
1002-2279(2015)01-0076-03
董克冰(1982-),男,湖南衡东人,硕士研究生,主研方向:微系统与自动控制技术研究。
2014-05-04