异步电动机故障检测系统研究
2015-08-06姜新通牟俊汉
姜新通,牟俊汉
(黑龙江八一农垦大学信息技术学院,大庆 163319)
随着经济的不断发展,电机在国民经济中起着举足轻重的作用[1-3]。电机在生活、生产中得到广泛的应用,在农业生产中,异步电机通常作为固定式农业机械设备的动力源,而固定式机械更易于实现自动化工作。电机在长时间的工作状态中,电机的工作状态、“健康状态”应该被随时关注和检测,否则一旦电机出现故障便会导致负载处于不稳定的工作状态,进而影响到工作效率或者增加电机的损耗,甚至更严重的是导致电机损毁,造成整个自动化流水线瘫痪或者造成意外事故。
虽然三相异步电机的构造和原理看起来很简单,但是它在工作过程中的电磁交互过程非常复杂,而且常常工作在很恶劣的环境中,尤其是在农业方面的应用。由于供电电源不稳定性、负载的多变性、长时间运行以及安装固定和使用的不稳定性等原因,电机难免会出现性能下降、部件老化和部件损坏等故障。因此,电机的故障检测和故障预警在农业机械中具有很重大的意义[2-4]。
1 系统硬件总体结构设计
该系统主要实现的功能是:首先采集三相异步电机的三个相电流、电机的表面温度和电机运转时的振动数据,然后将数据发送给控制芯片。经过控制芯片对所有数据进行分类打包并根据电机额定参数进行数据对比分析。如果超出额定值或者超出正常运行时的安全范围就在短时间内存储参数数据,先停止电机工作,再计算故障可能发生位置[5-6]。在极端情况下会立即做出停机动作,终止运行。

图1 系统硬件总体框图Fig.1 Overall block diagram of system hardware
1.1 主控芯片选型
主控模块平台是采集终端与上位机连接的中转平台,是全部采集系统的核心控制模块。因此在选择控制器时需要从整个系统的需求出发。对异步电动机故障检测系统选用STM32F103RBT6 作为主控芯片。STM32F103RBT6 是基于ARM 的Cortex-M3 架构内核的32 位处理器,具有单周期乘法和硬件除法,内嵌的中断控制器有43 个可屏蔽中断通道。内置128 KB 的Flash、20 K 的RAM、12 位的AD、4 个16 位定时器和3 路USART 通讯口等多种资源,时钟频率最高可达72 MHz。
1.2 温度采集模块设计
AD8497 是集成冷结温度补偿的精密热电偶放大器,该芯片将冰点基准与预校准放大器相结合,使其能直接从热电偶信号产生高电平(5 mV/°C)输出。AD8497 经过激光调整,与K 型热电偶的特性相匹配。其电路原理图如图2 所示。
如图2 所示的REF 管脚为AD8497 的基准电压,在该设计中电源采用单电源供电,REF 管脚接地,其基准电压为零。那么该放大电路的输出电压为:


图2 热电偶AD8497 放大电路原理图Fig.2 Amplifier circuit schematics of thermocouple AD8497
1.3 振动信号采集模块
MLV-9268 是一款国产的振动速度传感器,其频率响应范围为10~1 000 Hz,在80 Hz、10 mm·s-1速度下的灵敏度为28.5 mV·mm-1·s-1精度为±5%。传感器的工作温度范围为-20~120 ℃,在农业电机应用中电机轴承的温度一般不会超过100 ℃。
线圈切割磁感线产生电动势的计算公式:

其中Δφ 为磁通量的变化量,亦即线圈内的磁通量;Δφ/Δt 为线圈内的磁通量变化率。由式2 可知,磁通量的变化率是由振动的瞬间加速度决定的,如果在振幅固定的情况下,振动速度越快,产生的感应电动势越大[7]。而异步电机的振动频率与电机的转速有一定的关系,正常情况下是保持在一定频率运行。当电机产生故障时,如轴承、相间不对称等造成电机转动卡顿,振动信号也会随着卡顿,传感器的电动势将不再稳定。当然,传感器内线圈产生的感应电动势非常微弱,需要通过外部的加以信号放大电路,才能供给主控芯片进行分析。那么,其信号处理电路设计如图3。

图3 电机振动信号处理电路Fig.3 Signal processing circuit of motor vibration
图中,与温度采集部分一样使用AD623 作为放大芯片,用来放大振动传感器的电压信号。ADS7818是TI 公司的一款低功耗、小体积、高速的12 位模数转换芯片,它将AD623 放大后的振动模拟信号转换成数字信号,通过6 管脚串行输出。
1.4 电流信号采集模块
使用的JLT263I 组合电流变送器参数为:原边额定电流20 A,测量范围为0~15 A,额定输出信号为5 V 电压信号,辅助电源5 V。由于交流电流传感器输出电压信号范围为0~5 V,可以被模数转换芯片所识别,因此就不需要使用放大器将信号进行放大处理,直接连接模数转换芯片即可。
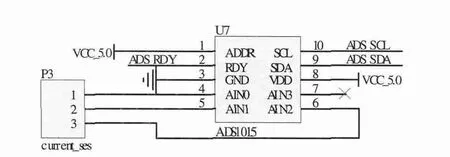
图4 传感器输出的电压信号模数转换电路Fig.4 Voltage conversion on circuit modulus of sensor output
ADS1015 的转换速率高达3 300 SPS,即每秒3 300 次采样。芯片内部还具有可编程增益放大器(PGA),具有放大±256 mV 弱信号的能力。该芯片的输入端经过多路复用器(MUX)进行配置芯片的输入是单输入或者多输入的功能。它具有两种工作模式,一种是连续转换模式,另一种是断续单次转换模式[8]。
2 软件系统框架分析
系统的软件设计按照工作的先后运作流程分为以下几个部分:(1)软件系统的初始化;(2)对电机开机前的状态监测;(3)启动异步电机;(4)周期的采集电机的运行参数;(5)单项参数预处理和故障保护单元。
主程序部分主要完成系统的初始化,以及在系统时钟驱动下完成对一些功能子任务的调用。周期的子任务处理各个不同的功能事件,并发信号给主程序执行相应的工作。图5 是由主程序和各功能子任务所构成的软件系统框架。
软件设计通过合理的功能划分形成了几个相对独立的任务,这在系统编程时使得代码结构非常清晰,对于针对功能的代码来说后期的维护和扩展也会相对比较容易[9-10]。由图5 所示系统是按照前面的运行流程来划分的,基本上也是分为六个部分。而系统的中断级响应,作为故障保护将有效提高对故障的响应处理速度[11]。
2.1 单项故障处理和保护的程序设计
如图6 所示,在电机在初始化之后,一般会投入一个低压来检测它的绕组是否短路等。而关于低压启动检测还有另一个目的就是,启动时由于电机的铜耗比较大,启动电流非常大,这时就需要一个较低一点的电压来减小启动电流对绕组的热冲击。一个比较经典的启动方式是星形-三角降压启动方法,即启动时,定子绕组按星形接线,启动后换成三角形接法。在线电压不变的情况下,利用这种拓扑的切换可以使启动电流减小三倍,绕组内部的电流也有1.7 倍的减少。

图5 软件系统框图Fig.5 System block diagram of software
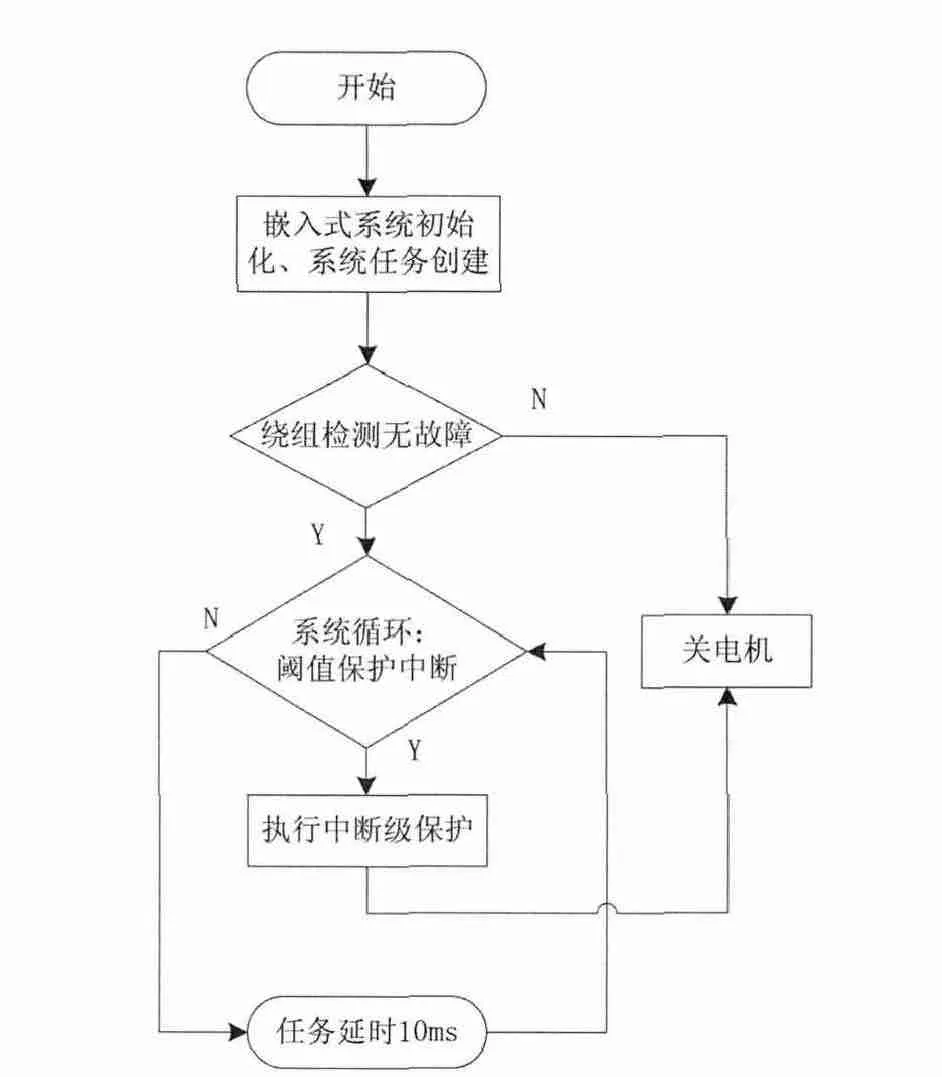
图6 单项故障处理和保护程序Fig.6 Single fault-handling and protection procedures
2.2 测量任务和数据处理任务的程序设计

图7 测量任务程序设计Fig.7 Program design of measurement tasks
在电机正常启动之后,对运行参数的测量将会成为系统的主要任务。系统对三个采样值的惯性特性不同进行了分级,对于惯性相对比较大的温度值,进行10 分频采样,如图7 所示。这样分级的优点在于能够合理的利用采样资源,避免过采样和处理器不必要的数据处理,优化了应用与资源的合理配置。
3 测试分析
测试选用Y180M-2 型三相异步电机,电机额定功率22 kW,额定电压380 V,采用三角形接法。
3.1 电机振动测试分析根
据电机振动测试标准,测试点的配置一般为6点,分别为横向两点、纵向两点和轴向两点,A、D 为纵向测试点,B、C 为横向测试点,E、F 为轴向测试点,振动指标如表所示:

表1 测点为ATable 1 Measuring point A
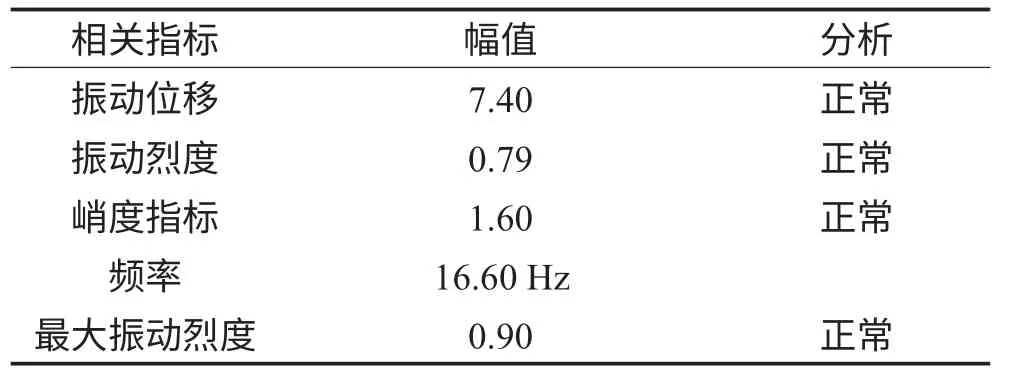
表2 测点为BTable 2 Measuring point B

表3 测点为CTable 3 Measuring point C

表4 测点为DTable 4 Measuring point D
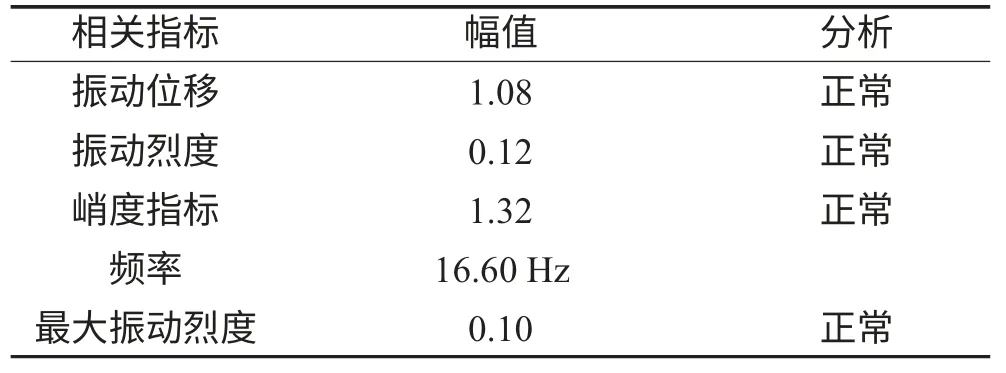
表5 测点为ETable 5 Measuring point E

表6 测点为FTable 6 Measuring point F
指标说明。振动位移:远小于任何振动标准相关临界值。振动烈度:远小于任何振动标准相关临界值。峭度指标:小于振动标准的峭度指标值,但已经比较接近。最大振动烈度:远小于任何振动标准相关临界值。分析说明。振动指标均未超出正常值,但峭度指标较大,频谱波形中有高频幅值,0.5 倍处有明显幅值,从上分析,电机润滑情况并不是很理想,电机有轻微转子静止摩擦,从振动测试看电机目前基本无明显机械故障。
3.2 电机温升试验分析
测试条件为:额定电压:380 V;输入功率(Pf):22 kW;频率:50 Hz 电机绝缘等级:E;室温:25.4 ℃;湿度:45%RH。在测量数据之前,让电机空转30 min后进行数据采集。
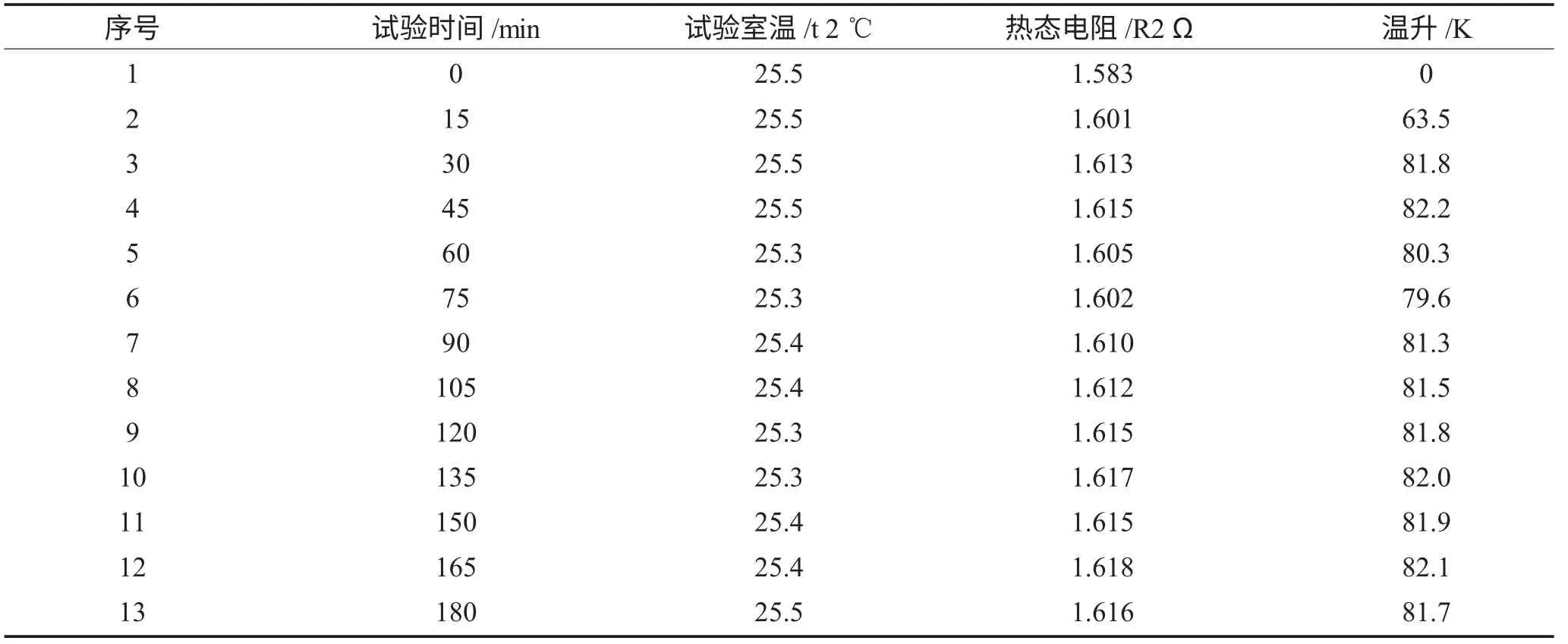
表7 电机升温实验记录数据表Table 7 Recording data of motor heating
从实验数据可以看出,在测试的3 h 里,电机的热态电阻变化不明显,电机温度也比较稳定,可以判定,电机工作正常,无故障。
4 结论
研究了一种异步电机的故障诊断系统,其中包括了主控模块的选型、电机的温度、振动、电流等参数的采集前端硬件元器件的选型和设计。系统通过传感器采集到电机实时运作时的多项参数,进而对电机各项参数进行分析,给出维修建议或者维护建议,从而达到了异步电机的故障检测的目的。在某种程度上,电机故障实时检测系统具有避免电机的严重损坏、避免生产线的长时间崩溃以及有助于电机维修效率的提高等优点,在实际应用过程中有重要实用价值。
[1]吕志香.基于DSO-2100 的异步电机故障诊断系统研制[D].哈尔滨:哈尔滨理工大学,2005.
[2]Marcos F S,Reinaldo M,Palhares R,et al.Takahashi,et al.Incipient fault detection in induction machine statorwinding using a fuzzy-Bayesian change point detection approach [J].Applied Soft Computing Journal,2009,11(5):108-111.
[3]易金桥,谭建军,廖红华,等.基于MSP430 单片机的低功耗射频识别系统[J].湖北民族学院学报:自然科学版,2013,31(3):308-312.
[4]张瑞祥,徐斌,赵军红.基于ADuC812 异步电机故障检测系统设计[J].煤矿机电,2005(3):9-11.
[5]于少娟,左龙,高云广.电机控制技术实践[M].北京:中国电力出版社,2009.
[6]Lee S H,Wang Y Q,Song J L.Fourier and wavelet transformations application to fault detection of induction motor with stator current [J].Journal of Central South University of Technology,2010,15(9):171-178.
[7]鲍晓华,吕强.感应电机气隙偏心故障研究综述及展望[J].中国电机工程学报,2013,6(6):93-100.
[8]Klemen D,Mitja N,Rastko F,et al.Simplified detection ofbroken rotor bars in induction motors controlled in field reference frame[J].Control Engineering Practice,2012,13(6):208-217.
[9]谢文强.基于虚拟仪器的异步电机性能测试系统的研制[D].西安:西安科技大学,2012.
[10]安国庆,靳彦虎,付超.基于虚拟仪器技术的异步电机定子匝间短路故障在线监测系统[J].仪表技术与传感器,2013,7(15):52-54.
[11]康忠伟,石莉莉,孙艳波.抽水电机组节能控制装置的研究与设计[J].黑龙江八一农垦大学学报,2013,25(6):63-64.
