水平井电缆牵引器驱动装置参数优化
2015-08-04高德利陈亮帆
张 勇,高德利,陈亮帆,刘 奎
水平井电缆牵引器驱动装置参数优化
张 勇,高德利,陈亮帆,刘 奎
(中国石油大学(北京)石油工程教育部重点实验室,北京102249)
为了提高牵引器的牵引能力和井下适应性,建立牵引器驱动装置的参数优化计算模型,对驱动装置的接触力系数以及驱动臂与支撑臂的长度、张开角等相关参数进行分析和优化计算,分析牵引器的越障能力。分析结果表明:接触力系数越低,则牵引力越大,且随驱动臂和支撑臂的张开角的增大而减小,随该角度的增大而变化趋势减缓。基于Ø177.8 mm(7英寸)套管的实例,验证和计算了牵引器驱动装置各参数之间的变化关系和优选范围值。
水平井;牵引器;驱动装置;参数优化
随着石油勘探开发过程中水平井、大位移井等钻井技术的迅猛发展,井眼条件越来越复杂,修井、测井等井下仪器的下入也变得越来越困难[1-2]。牵引器作为井下仪器的送入工具也越来越受到重视,并逐步发展起来。
水平井电缆牵引器又称井下爬行器[3],由井下驱动装置和地面控制系统组成,其中驱动装置是牵引器最核心、最关键的部分。国外早在1996年开发了W elletc轮式水平井牵引器,并成功投入使用[3-4];国内的井下牵引器还处于理论研究和设计试验阶段[5]。由于牵引器具有结构紧凑、外径尺寸小等特点,在井下的牵引、越障以及井眼适应性有限。为此,本文结合牵引器驱动装置的结构及原理,建立其驱动机构的参数优化计算模型,对驱动装置的接触力系数以及驱动臂与支撑臂的长度、张开角等相关结构参数进行了分析和优化计算;并通过分析各参数之间的变化关系以及牵引器的越障能力,结合计算实例验证驱动装置参数优化的合理性,以提高牵引器的牵引能力和井下越障适应性。
1 建立优化计算模型
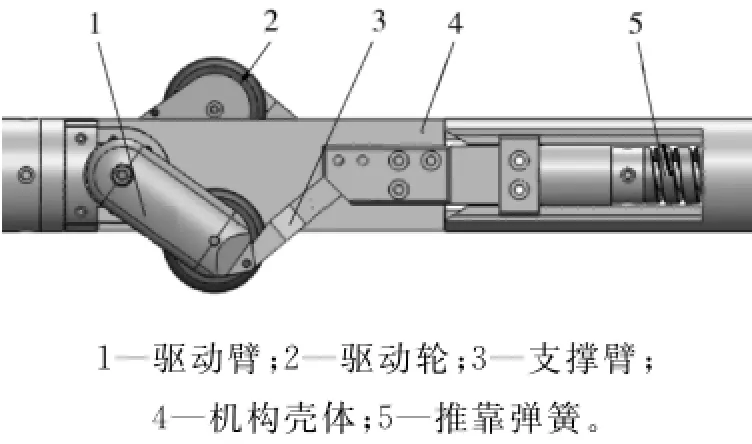
图1 驱动机构
取牵引器驱动机构一侧单元体作为研究对象,参数与受力简图如图2所示。驱动机构是一个连杆滑块机构,弹簧推力通过滑块作用于驱动臂[6],使驱动轮受到轮与井壁的接触正应力,即牵引力来自于驱动轮与井壁的静摩擦力;由接触应力与弹簧推力之间的比率关系引入接触力系数η,当接触力系数η越小,获得一定的接触力所需要的横向弹簧推力越小。由此可以得到
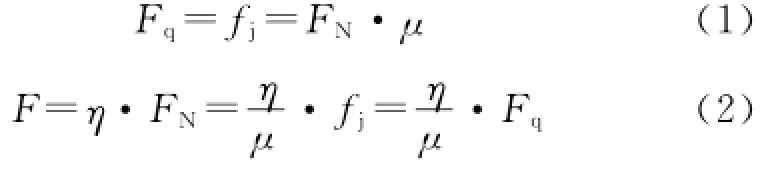
式中:FN为轮与井壁的接触正应力;Fq为牵引力;Fj为驱动轮与井壁的静摩擦力;μ为静摩擦因数;F为弹簧推力;η为接触力系数。
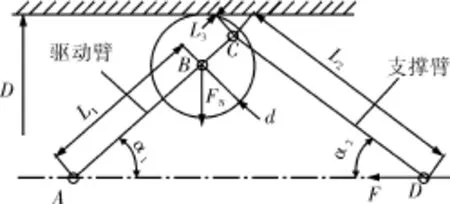
图2 驱动单元体参数及受力分析
图2中:L1为驱动臂长度;L2为支撑臂长度;L3为支撑点与驱动轮中心点距离;α1为驱动臂张开角;α2为支撑臂张开角;D为套管内径;d为驱动轮直径。
根据几何关系,驱动臂长度L1、支撑臂长度L2应满足

建立模型优化计算的目标为:驱动臂长度L1、支撑臂长度L2以及张开角α1、α2在一定的范围内得到合理的接触力系数η值,从而提高牵引器的牵引能力和越障能力。
2 模型求解
基于已建立的模型,分析驱动单元体的受力[7],如图3所示。

图3 驱动臂和支撑臂受力分析
对于驱动臂的力学平衡,有
习近平同志在《弘扬“红船精神”,走在时代前列》的文章中首次提出并阐述了“红船精神”的内涵:“开天辟地、敢为人先的首创精神,坚定理想、百折不挠的奋斗精神,立党为公、忠诚为民的奉献精神。”[2]“红船精神”作为中国革命精神的源头,它回答了“党为什么要出发”的重大理论问题,彰显着共产党人的初心和使命。

对于支撑臂的力学平衡,有

求解得

其中:

式(5)~(6)中:FAx、FAy、FCx、FCy、FDy分别为A、C、D点在x、y方向上的受力分量;其中FCx和弹簧推力F是相等的。
接触力系数η越低,说明在推力一定时得到的接触力越大,牵引力也越大;且接触力系数随驱动臂张开角α1和支撑臂张开角α2的增大(即:驱动臂长度和支撑臂长度的减小)而减小,随角度的增大而变化越小;当α1、L1越大且确定为某一较大理想值时(即L2越小),η值越小。
3 越障分析
水平井井眼情况复杂,由套管工艺、油垢堆积附着等会使井壁出现局部凹凸不平。因此,牵引器在井下能否越过井下的障碍也是牵引器分析和研究的重要部分。由于接触力系数η随驱动臂张开角α1和支撑臂张开角α2的增大而减小的特点有利于越过凹坑型障碍,因此进行越障分析时应着重于牵引器越过凸台障碍的情况。牵引器在井下越障时的变化情况如图4所示。

图4 越障示意
显然,牵引器在越障过程中,张开角α1、α2逐渐减小,直至越过障碍角度变为α′1、α′2;相应的接触力系数η增大。即越障时,要使驱动轮获得一定的接触正应力FN,需要的弹簧推力越大。设θ为障碍的坡度角(即障碍相对井眼轴线的倾角),越障碍时接触力系数为η′,越障后接触力系数为η″,则驱动轮离开正常段驱上障碍段起始临界点时,为最小接触力系数η′min;而越障后进入障碍段时可以近似为最大接触力系数η′max。
驱动单元体在越过障碍的受力情况如图5所示。

图5 驱动单元体越障受力分析
对于驱动臂和支撑臂的力学平衡求解可得在障碍起始临界点,有

越障后进入障碍段的临界点,有

越障后在障碍段驱动,有

其中:


牵引器越过障碍物而不发生倒退等的临界点是电缆牵引器能够平稳越过的最大高度极限值,即最大越障高度hmax。分析可得

4 实例计算与分析
根据上述对驱动装置各参数的分析计算以及相互影响关系,以牵引器在Ø177.8 mm(7英寸)套管内爬行的实例进行计算和分析。为了减少牵引过程中的阻力,驱动轮半径尽量大一些,取d=64 mm,L3约为d/2,计算时取L3=30 mm。优化计算中保持L1、L2关系满足式(3)~(4);通过式(3)~(4)的参数关系,取特殊值计算出驱动臂长度L1与张开角α1的关系,以及α1、α2在一定范围内与所对应支撑臂长度L2的变化关系。关系曲线如图6~7所示。

图6 驱动臂长度L1与张开角α1的关系曲线
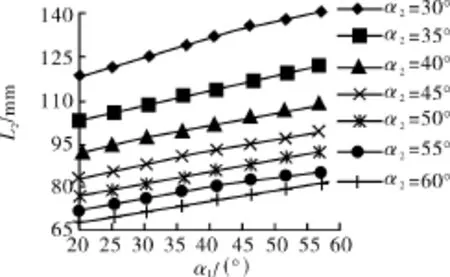
图7 支撑臂长度L2对应α1、α2的变化关系曲线
同样对式(8)采用特殊值法,计算当α1、α2在一定范围内变化所对应的接触力系数η值的变化情况,数据变化规律曲线如图8所示。此外,由越障分析中所述的牵引器在越障时的张开角α1、α2的变化和接触力系数η的变化情况,结合式(14)~(15)计算越障后张开角α′1、α′2以及接触力系数η″对应驱动臂张开角α1的变化关系,如图9~10所示。通过计算驱动装置的结构参数并分析参数间关系,以合理的接触力系数η为优选原则,拟选L1、L2、α1、α2的值为50°≤α1(α2)≤55°;60 mm≤L1≤68 mm;84 mm≤L2≤93 mm;η=0.240~0.366。在优选范围内,α1、α2越大,相应的L1、L2越小,η值越大。

图8 接触力系数η值对应α1、α2的变化关系曲线

图9 张开角α′1、α′2对应α1的变化关系曲线

图10 接触力系数η″对应α1、α2的变化关系曲线
5 结论
1) 建立了水平井电缆牵引器驱动装置驱动机构的结构参数和受力模型及参数优化计算模型,并求解模型得到关键目标参数接触力系数的解析函数。
2) 驱动装置的驱动臂与支撑臂的长度、张开角等相关结构参数决定着驱动机构接触力系数的大小。在一定范围内,该值越小,在一定的弹簧推力下获得的接触应力或牵引力越大;且随驱动臂和支撑臂张开角的增大而减小,随角度的增大而变化越小。
3) 通过对参数及越障的分析,结合计算实例验证驱动装置参数优化设计的合理性,能在满足牵引器结构特性的前提下,提高牵引器的牵引能力和井下越障适应性。
[1] 刘猛,高进伟,熊万军,等.水平井井下仪器送进技术的现状及发展建议[J].石油矿场机械,2004,33(6):16-18.
[2] H allibutron.W ell tractors for highly deviated and horizontal wells[G].SP E,28871,1994.
[3] 高胜,孙文,倪晗,等.石油井下牵引器设计现状及几点认识[J].机械设计,2014,31(2):1-8.
[4] K unt Stvaing,John H aukvik,Terje Skeie.The wireline tractor pperations successful in horizontal wells[J].W orld Oil,1997(4):125.
[5] 唐德威,王新杰,邓宗全,等.水平油井检测仪器拖动器[J].哈尔滨工业大学学报,2007,39(9):1395-1397.
[6] 曾华军,李军,刘文剑,等.基于复合形法的水平井牵引器驱动臂设计[J].石油机械,2010,38(11):33-35.
[7] 张宗仁,赵宁,高德利.水平井可差速电缆牵引器设计[J].石油矿场机械,2012,41(10):45-49.
Parameter Optimization of Drive Device of Cable Tractor in Horizontal W ells
ZHANG Y ong,GAO Deli,CHEN Liangfan,LIU Kui
(Key Laboratory for Petroleu m Engineering of the Ministry of E ducation,China Uniuersity of Petroleu m(Beijing),Beijing102249,China)
In order to im prove the traction ability,dow n-hole adaptability of tractor,a para meters optimization calculation m odelfor the drive device of tractor was established.Relevant para meters of drive device including contact force coefficient,open-angle and length of drive arm,open-angle and length of support arm and obstacle-surm ounting ability of tractor were analyzed and optimal calculated in this paper.T he analysis resultindicates the contact force coefficient smaller the greater traction is.M oreover,the contact force coefficient decreases with the increase of open-angle of drive arm and support arm,changes smaller along with the increase of angle.In addition,the para meters’changing relationship of drive device and the optimal range of values were verified and calculated.
horizontal well;tractor;drive device;para meter optimization
T E927
A
10.3969/j.issn.1001-3842.2015.01.008
1001-3482(2015)01-0030-04
2014-07-09
国家科技重大专项“复杂结构井优化设计与控制关键技术”(2011Z X05009-005);国家自然科学基金创新研究群体项目(51221003)
张 勇(1990-),男,湖南长沙人,硕士研究生,主要从事油气井力学与控制工程研究,E-mail:zy_1363@163.co m。
