RTK-GPS技术及其在AGV导航中的应用
2015-08-02曹西京张登榜朱本辉
曹西京,张登榜,朱本辉
(陕西科技大学 机电工程学院,陕西 西安 710021)
RTK-GPS技术及其在AGV导航中的应用
曹西京,张登榜,朱本辉
(陕西科技大学 机电工程学院,陕西 西安 710021)
介绍了GPS卫星导航系统的测距原理,概括并讨论了GPS系统的主要误差来源;分析了RTK-GPS技术的原理及实现方法,并利用其高精度和导航平稳性,阐述了以GPS作为AGV绝对定位方式的可行性。最后针对在室外环境下的工作要求,设计了一种RTK-GPS与航位推算多传感器组合导航AGV定位系统,实验表明该系统可满足AGV在室外环境下的运行要求,是一种可行的AGV定位导航方式。
GPS;误差;RTK-GPS;AGV;定位系统;导航
1 引言
自动导向车(Automated Guided Vehicle,AGV)是指能按照设定的路径自动行驶至指定地点,具有安全保护以及各种移载功能的工业车辆。AGV按照不同的导航定位方式发展出了电磁导引、光学导引、激光导航、超声波导向、视觉导航和GPS导航等技术。随着AGV的应用越来越广泛,室内环境下,电磁、光带等导航方式因其技术成熟、易实现等优点被普遍采用;但在室外开阔场所,针对运行环境复杂、难以设置固定参照物等特点,近年来,GPS导航AGV技术因其路径更改自由,在室外开阔场所实现方法简单及结合数字地图便于成队指挥监控等特点,越来越受到研究者的重视。
本文主要分析GPS卫星导航误差的来源,解释RTK-GPS技术的原理,并使用RTK-GPS技术作为AGV的绝对定位方式,理论分析和仿真的结果均表明,该方式无论在定位精度还是鲁棒性等方面均可以满足AGV导航定位的要求,是一种很有应用前景的AGV定位系统选择。
2 GPS系统测距原理及定位误差分析
2.1 GPS卫星导航的测距原理
全球定位系统(Global Positioning System,GPS),由卫星星座、地面监控和用户接收机三大部分组成,能够实现全球性、全天候、连续不断的三维定位测量,为用户提供高精度的导航定位服务。20世纪60年代,美国海军最早建立了Transit导航系统,主要用于对潜艇和舰船进行导航,但Transit系统不仅响应速度慢且需要很长的观测时间。随后在1967年,海军又建立了Timation系统,与此同时,空军发展了B621系统。随后,为避免海军、空军等不同机构在卫星导航研究上的分化并节约经费,美国国防部合并了许多卫星导航系统项目,并组建了新的NAVSTAR卫星导航系统(即GPS系统),90年代开始GPS系统逐渐具备了完全运行能力,正式向全球用户开放[1]。
GPS卫星导航定位是基于被动式测距原理的,即GPS信号接收机被动地测量来自GPS卫星的导航定位信号的传播时延,而测得GPS信号接收天线相位中心和GPS卫星发射天线相位中心之间的距离(即站星距离),进而将它和GPS卫星的在轨位置联合而解算出用户的三维坐标[2]。
为了测定三维空间中某一点(User)的坐标(xu,yu,zu),选取位置已知的三颗卫星,通过测量该点与3颗卫星的距离,这3个距离形成的球面相交于一点,通过解算可以得到交点的坐标,即该点所在的位置。当用户使用GPS接收机时,接收机可识别卫星发射的测距码信号,测距码信号经过Δt秒传播时间到达接收机,接收机立即生成一个结构与之完全相同的复制码序列,使复制码序列与测距码序列同步,就可以测得此信号传播时间Δt,如图1所示。
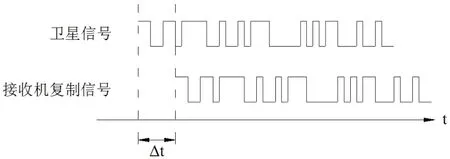
图1 测量信号的传播时间
由于接收机时与GPS时存在时钟偏差δtu,因此测得的用户距离为不准确的伪距,为确定4个未知量(δtu,xu,yu,zu),需要4个独立的方程,因此在GPS定位解算时,至少需要同时观测4颗以上卫星,才能求出用户的位置坐标。
如果同时观测n颗卫星,则:

式(1)中,Pi表示卫星i与接收机的伪距测量值,(xi,yi,zi)为第i颗卫星所在的三维位置,c为光速。
在此,为计算用户的实际位置,引入一个接近用户位置的估算位置(xe,ye,ze)和估算时钟偏差δte,该估算位置与用户位置误差记为δx,δy,δz,可知x'u=xe+δx;yu=ye+δy;zu=ze+δz,则对于相应的站星距离Pu,存在Pu=Pe+δP,将方程线性化,得到矩阵形式为:

式(2)中:

此处,Re指卫星i与估计位置的间距,其计算如下:

式(2)可简化为:

经变换可得到:

通过解算初始的用户站星伪距测量值Pi,由式(4)可求出偏差值δx,δy,δz和δte,按式(4)进行重复标准迭代,可得到新的用户与卫星的站星距离Pi,并得到新的误差分量δx,δy,δz和δte,直到第(n+1)次解算的X(t)n+1≈X(t)n为止,通常需要3~5次迭代计算,即可得到我们认可的用户位置和时钟偏差,即(δtu,xu,yu,zu)。
2.2 GPS卫星导航定位误差分析
GPS导航定位误差受多种因素影响,包括卫星误差、传播误差、接收误差等,其中主要误差因素如下:
(1)星历误差。星历即卫星导航电文中确定的GPS卫星在轨位置,如前所述,GPS卫星导航是利用已知卫星的准确位置进而解算出用户所在的位置,卫星星历由地面监控系统推算并维护更新,但与卫星实际的空间位置难免存在偏差;且GPS卫星受到日、月和地球等引力场的摄动影响,各种摄动力加速度会引起卫星位置的偏差。当前GPS卫星的广播星历轨道误差约在±2m[3]。
(2)时钟误差。每颗GPS卫星上都配备有高精度的原子钟(铯钟和铷钟),其日频率稳定度可达到10-13,运行12h误差小于10ns,但即便如此,10ns产生的伪距误差约等于3m;卫星钟时与GPS时的误差小于1ms,而1ms钟差引起的等效距离误差可达300km[4],GPS时间系统还存在着接收机时与GPS时的偏差及卫星钟时与接收机时的偏差。地面监控系统需要不断对各时间系统进行维护和修正。
(3)电离层时延改正误差。电离层是距离地球表面50~1 000km之间的大气层,由于其受到太阳高能辐射以及宇宙射线的激励处于部分电离和完全电离的状态,其中存在大量的自由电子和离子,能改变GPS信号的传播速度,使无线电波发生折射、反射和散射,并受到不同程度的吸收而损失部分能量,且电离层结构特性随太阳活动、空间的差别呈现不断的变化。电离层对GPS信号传播产生附加时延[5],使测量精度产生误差。
(4)对流层时延改正误差。对流层在电离层之下,靠近地球表面,对流层中干燥空气和水分子等中性粒子会使GPS信号在此空间中传播时的传播路径比几何路径长,导致GPS信号传播路径的偏差。对流层对误差的影响要比电离层小很多,但也不可忽略。
(5)多路径误差。理论上,GPS接收机应该接收直接来自GPS卫星发射的信号,即直接波,然而在现实的测量定位中,GPS接收机不可避免地要接收来自地面、建筑及其他途径反射的间接波。由于反射和散射的原因,间接波实际所历路程大于直接波,该延迟在到达接收机后会对直接波产生干扰,使跟踪相关峰失真,从而在伪距和载波相位测量值上引入误差,尤其在城市地区等多径环境里,这些误差会非常大[6]。
(6)观测噪声。由GPS接收机热噪声和分辨率、天线噪声、其他相同频率信号等干扰的影响,所造成的伪距测量的误差。
综合考虑以上误差对伪距测量造成的影响,式(1)的卫星i与用户的伪距测量值修正为[7]:

其中,Ik(t)表示第k颗卫星由于电离层引起的传播延迟修正值,Tk(t)表示第k颗卫星由于对流层引起的传播延迟修正值,ɛk(t)表示第k颗卫星其他原因引起的测距误差修正值,如接收机噪声和多路径误差。
表1列出了以上影响所导致的GPS标准定位误差估值。
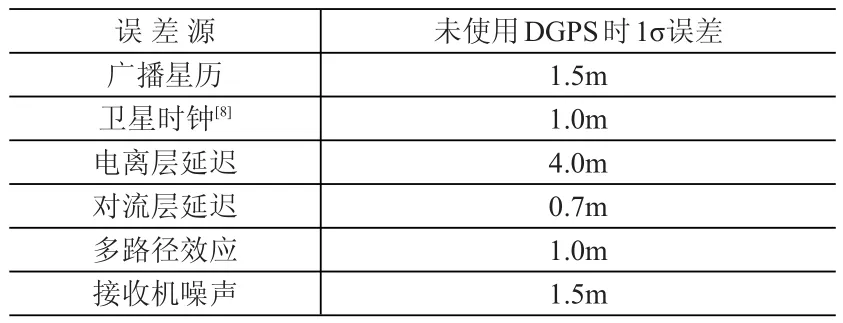
表1 典型的标准定位服务测距误差估值
3RTK-GPS原理
载波相位差分定位(Real Time Kinematic,RTK),是以载波相位作为基本观测量的实时差分测量技术,其工作原理是:分别安装GPS基准站接收机和移动站接收机,基准站固定安放于空旷位置,移动站则安装于AGV本体上,基准站和移动站同时连续的接收GPS卫星信号,然后基准站通过数据链路将其观测值(伪距和相位的原始测量值)、测站坐标、卫星跟踪状态及接收机工作状态等发送给移动站,移动站内解求载波相位整周模糊度,再通过相对定位模型获取所在点相对基准站的坐标和精度指标(如图2所示)[9]。
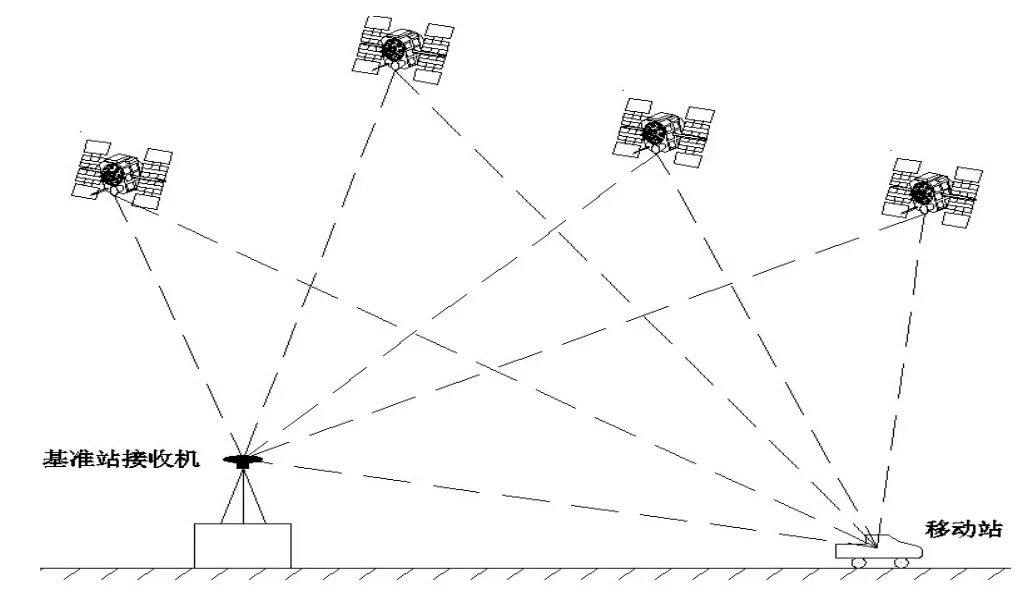
图2 RTK测量示意图
卫星信号以载波的形式从卫星到达接收机,载波的波长λ约为19cm,如果可以获得该过程中载波相位的整周模糊度N,就可以计算出卫星到用户的距离。要求出载波整周模糊度相当困难,但通过该方式可实现厘米级的定位精度。以下解释通过三差法求解整周模糊度的数学模型。
首先,通过基准站、移动站坐标和卫星星历,可按式(5)计算出基准站b和移动站m到卫星j、k的伪距
同一时元,基准站和移动站分别对同一颗卫星的载波相位观测量求差,得到四个单差分方程:
式(6)中,f为载波频率,c为光速,δt指接收机与卫星钟的时钟偏差,Nm,Nb表示卫星和接收机的载波相位整周模糊度。同一历元再对两颗星的单差方程相减得双差分方程:

再对两颗星在历元t1、t2的双差方程求差,得到三差分观测值:

根据以上数学模型,解算用户站位置采用以下步骤[10]:
(1)用三差分方程解算基线向量初值;
(2)静态观测若干历元,解算整周模糊度;
(3)用双差分方程,结合已求出的整周模糊度,观测4~6颗星作线性拟合或选择几何图形好的卫星组,求出3个位置分量Δx,Δy,Δz;
(4)通过3个位置分量与基准站已知坐标联合解算,即可求出此时移动站的地心坐标,再利用坐标转换得到需要的坐标信息。
通过载波相位差分GPS,可有效消除或削弱星历误差、星钟误差、电离层延时误差和对流层延时误差及随机噪声误差的影响,从而获得厘米级的导航定位精度。
4RTK-GPS在AGV导航中的应用
AGV在柔性加工系统、柔性装配系统、自动化立体仓库中有广泛的应用,还可以将AGV应用于巡视机器人、观光车、军事等领域。由于传统的AGV导引方式多为固定路径运行或需要在运行范围内大量设置标识物、参照物等设施,且对运行环境的要求较高,因此多局限于室内环境使用。因此,在室外开阔环境下,以GPS为导航定位方式的AGV就显示了它的特殊之处。
以往,由于GPS导航定位的一些缺陷,满足不了其在AGV定位系统中的使用。已经广泛采用的AGV导引方式,如电磁导航、光带导引、激光导航等方式,其定停及行车精度都可达到厘米级控制,而单一的GPS接收设备其定位精度却在数米以上;另外,在城市建筑、楼宇之间、车间林立的工厂环境或有树木等障碍物遮挡时,常会导致GPS接收机处于暂时无信号状态,GPS星座整体不可见,导致GPS模块失效,此时不能够为车辆提供定位导航服务。
为弥补GPS定位导航的以上缺陷,需采用多传感器融合的方式进行车辆组合导航。以下介绍RTK-GPS与DR系统结合的组合导航方式。
首先,RTK-GPS技术的应用,解决了GPS作为绝对定位方式的精度问题,目前各种类型的GPS接收机RTK测量的定位精度不同,但一般动态定位精度都能达到厘米级别,可以满足AGV定位导航的需要。近年来高精度GPS接收机普遍采用了双频或四频接收,并使用GPS与GLONASS集成,或GPS与北斗导航系统集成的方式,大幅提高了接收机的导航定位精度,并能消除间隙时段、缩短响应时间,减少跟踪失锁,保证了精确导航的连续性。
其次,选用DR系统和RTK-GPS联用的组合导航的方式。DR(Dead Reckoning,航位推算)系统使用陀螺仪和里程计,通过对车辆相对于初始位置航向角变化量和距离变化量的测量,与原始位置累加,从而推算出用户的当前位置;但DR存在系统误差随时间积累逐渐变大的问题,不能单独、长时间地使用[11]。DR和GPS有很强的互补性,把二者组合起来,进行优劣互补,可以获得一种性能超过任一单一导航方式的新系统。一方面使用RTK-GPS作为绝对定位传感器,其精确的定位结果可辅助DR的初始化并且可以定期地对DR系统的定位误差进行校准;另一方面,在GPS信号暂时失效时系统又可以自动地切换到DR导航方式,使系统能够在一段时间内推算出车辆的位置变化,直至GPS接收机恢复正常接收后,系统再回到GPS与DR的组合导航方式,确保系统能在任何时候都能为运动车辆提供较为准确的导航信息,此二者结合可有效保证车辆在盲区的平滑、连续运行[12]。
基于以上分析,设计了如下GPS、DR多传感器组合导航的AGV定位系统,如图3所示。
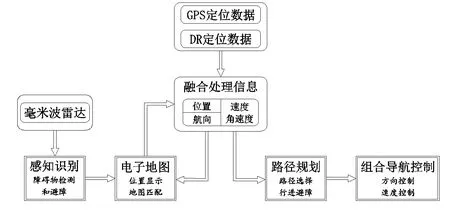
图3 一种GPS多传感器组合导航定位系统
首先,使用卡尔曼滤波算法对GPS和DR数据进行融合处理和误差估计,组合算法比较DR和GPS的设备输出,并估计DR导航位置、速度、姿态等参数的校正量,校正后的DR输出构成组合导航输出;同时,使用毫米波雷达对系统进行环境感知和行为避障,进一步增加车辆的适应性和安全性。该多传感器组合导航定位系统无论是在精确度还是平稳性等方面较常规导航方式有很大提高,实验证明其是一种可行的AGV定位导航方式,可以满足室外AGV的导航定位需求。
5 结束语
载波相位差分GPS技术可以大幅度地提高GPS导航定位精度,实现厘米级动态导航定位;通过集成其他GNSS系统,可进一步提高接收机的精度、容错性及平稳性。高精度接收机的应用为GPS作为AGV定位系统绝对定位方式提供了可能性。可以预见,未来GPS系统还将在AGV、无人驾驶汽车,无人机等不同领域发挥更广阔的应用。
[1]Adam Theiss,David C Yen,Cheng-Yuan Ku.Global Positioning Systems:an analysis of applications,current development and future implementations[J].Computer Standards&Interfaces,2005,(27):89-100.
[2]刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2008.
[3]郭斐,张小红,李星星,胡权.GPS系列卫星广播星历轨道和钟的精度分析[J].武汉大学学报(信息科学版),2009,(5):589-592.
[4]王晓华,郭敏.GPS卫星定位误差分析[J].全球定位系统,2005,30(1): 43-47.
[5]宋茂忠,王永澄.电离层对普通GPS和位置差分GPS定位误差的影响[J].南京航空航天大学学报,1994,(6):782-788.
[6]Scott Gleason,Demoz Gebre-Egziabher.GNSS Applications and Methods[M].Artech House Publishers,2009.
[7]Pratab Misra,Per Enge.Global Positioning System:Signals,Measurements and Performance[M].Ganga-Jamuna Press,2006.
[8]Creel T,et al.New,Improved GPS:The legacy accuracy improvement initiative[M].GPS world,2006.
[9]余小龙,胡学奎.GPS RTK技术的优缺点及发展前景[J].测绘通报, 2007,(10):39-41,44.
[10]冯文江,杨士中.GPS差分相位定位技术的数学模型[J].石油仪器, 1999,13(3):1-3,5.
[11]吴秋平,万德钧.一种连续定位式车辆组合导航仪的研制[J].电子技术应用,1998,24(8):32-34.
[12]Kealy N,Tsakiri M,Stewart M.A Kalman filter solution using integrated GPS,GLONASS and Dead Reckoning[Z].1999.
Application of RTK-GPS Technology in AGV Navigation
Cao Xijing,Zhang Dengbang,Zhu Benhui
(School of Electro-mechanical Engineering,Shanxi University of Science&Technology,Xi'an 710021,China)
In this paper,we introduced the range finding mechanism of the GPS satellite navigation system,discussed the major sources of error of the GPS systems,then analyzed the principle and the method of realization of the RTK-GPS technology,and next introduced the feasibility of the GPS as the means of absolute positioning for the AGVs.At the end,in view of the condition of the indoor working environment,we designed a combinational AGV navigation and positioning system based on the RTK-GPS technology and the deadreckoning sensor technology.
GPS;error;RTK-GPS;AGV;positioning system;navigation
P228.4;TP242
A
1005-152X(2015)10-0252-04
2015-08-25
曹西京(1953-),男,陕西西安人,教授,研究方向:凸轮机构理论及应用技术、机电系统控制工程;张登榜(1988-),通讯作者,男,陕西西安人,硕士研究生,研究方向:GPS/DR/MM组合导航定位系统的设计与开发。
10.3969/j.issn.1005-152X.2015.10.067