蜘蛛机器人设计研究
2015-07-31吴凯江亚龙殷建
吴凯 江亚龙 殷建


摘 要:蜘蛛机器人是针对在狭小通道和深井的探测、搜索、救援工作。以真正实现海陆空搜寻机器人系统全方位的搜救。作为本文的研究重点是对蜘蛛机器人的机械零部件、行走机构、驱动控制和信息反馈及处理做了详细的分析和设计,使得蜘蛛机器人满足灵活、小巧、经济的要求。使得蜘蛛机器人完全异于普通搜救机器人。为蜘蛛机器人设计了强大的机械手臂库,提高其应用范围使得蜘蛛机器人不仅能实现探索,更能替人在无法到达的环境工作。
关键词:深井搜救;管道探测;蜘蛛;机器人
中图分类号:TP242 文献标识码:A
在21世纪的今天,随着自然灾害、恐怖活动和各种突然事故发生的越来越多,在灾难救援中,救援人员用较短的时间在废墟中寻找幸存者的几率比较小,在这种紧急而危险的情况下,救援机器人可以为救援人员提供有效的帮助。因此那些经常接触不到和容易被人忽略的死角,例如通风管道,就成为我们重点监测的对象。深井搜救和管道探测在搜救过程中显得尤为重要。在保证搜救人员的安全前提下,提高搜救效率是当今社会关注的焦点。近十年来,美国、日本等西方发达国家在地震、火灾等救援机器人的研究方面做了大量的工作。日本大阪大学研制出蛇形机器人,能在高低不平的模拟废墟上前进,其顶端带有1部小型监视器,身体部位安装传感器,可以在地震后的废墟里寻找幸存者。2006年6月,中国矿业大学的机器人研究所成功研制了 “CUMT-1”矿井救灾机器人,并对救灾机器人的机构设计做了一些有益的尝试。
本文提出了蜘蛛机器人的概念设计,然后着重对创新设计的移动方式及强大的机械手臂库做了详细的论述。
2 蜘蛛机器人本体设计
通过对国内外蜘蛛机器人移动方式的比较,蜘蛛机器人的前进方式有连杆机构式、单杆机构式和腹部蠕动式,连杆机构和单杆机构的运动方式类似于划船时的船桨运动,是通过对壁面向后的摩擦力来实现前进,但是由于其返程路径必须和原路径不一致,因此都需要加入新的机构和连杆机构、单杆机构进行组合,最终形成的机构体积较为庞大,给日后进一步开发、实现小型化增添了困难。而腹部蠕动机构则可以按原路径进行返程运动,不需要添加新的机构,因此结构较为简单,易于小型化。故腹部蠕动机构适合于通风管道探测用的机器人。该蜘蛛机器人运动机构分为:腿的伸出机构、主体与底板的差动直线运动、旋转机构,如图1所示结构。
由于同一对腿实现同时伸出,同时收回,因此从经济性、体积小的角度出发,要求其实现,一个电机同时控制一对腿的伸出和收回,因此在腿的伸出机构中需要有力的差动机构。齿轮齿条机构、连杆机构、对称双连杆机构、丝杠螺母副及滑轮机构等均能实现上述目标,但齿轮齿条机构的成本较高,不符合经济性;连杆机构存在侧向力,容易出现“卡死“现象;连杆对称机构虽无侧向力,但是其中涉及的固定点难以设置,因此也不适合;丝杠螺母副及滑轮机构,无侧向力的存在,其价格适中,传动比大,因此不需要减速机构,而且具有自锁性,可以实现脚的保持于某一位置不动,且伸出力也较大,把持力大,结构小且简单。同时,上面安装的是滑轮和橡皮筋(考虑到经济性,用橡皮筋代替弹簧),价格便宜,安装要求和难度较低,故采用该机构。
蜘蛛机器人在运动时,主板与底板之间是差动直线运动,类似于蚕的蠕动过程。其要求运动要平稳,且任意位置可停、可自锁。曲柄滑块机构、丝杠螺母副均能实现差动直线运动,但曲柄滑块机构累计误差大,机械效率低,且一般做变速运动,故运动不平稳,且有惯性力,所以不适用于本机器人的机构。丝杠螺母副价格适中,传动比大,因此不需要减速机构,而且具有自锁性。
蜘蛛机器人通过对限位开关、电机等一系列的元器件的控制,使其能够正常运作,即行走、转向功能的实现。共需要使用14个限位开关。整个机器人采用顺序控制,即由限位开关信号的顺序来控制。通过对直流电机、步进电机和超声直线电机的性能比较,机器人采用直流电机实现。通过对H桥集成功放电路设计和改进,即在基本H桥电路里添加旁路电容和续流二极管来保护电路,以实现对电机正反转的控制。为实现初步行走,验证设计思路的正确性,在机械本体做完后,设计加工拨动开关电路板,用手协调拨动开关,看其是否能够预计运动路径,经检验,严格按预计要求运动,故上述设计思路正确。
3 蜘蛛机器人仿生机械手臂库设计
为满足蜘蛛机器人复杂工作环境和特殊工作任务的需要,不仅需要蜘蛛机器人以独特的移动方式以保证能通过,还需要配备能满足各种作业需求的手臂。更进一步提高蜘蛛机器人的实用性,也足以能应对任务执行中遇到的各种问题。
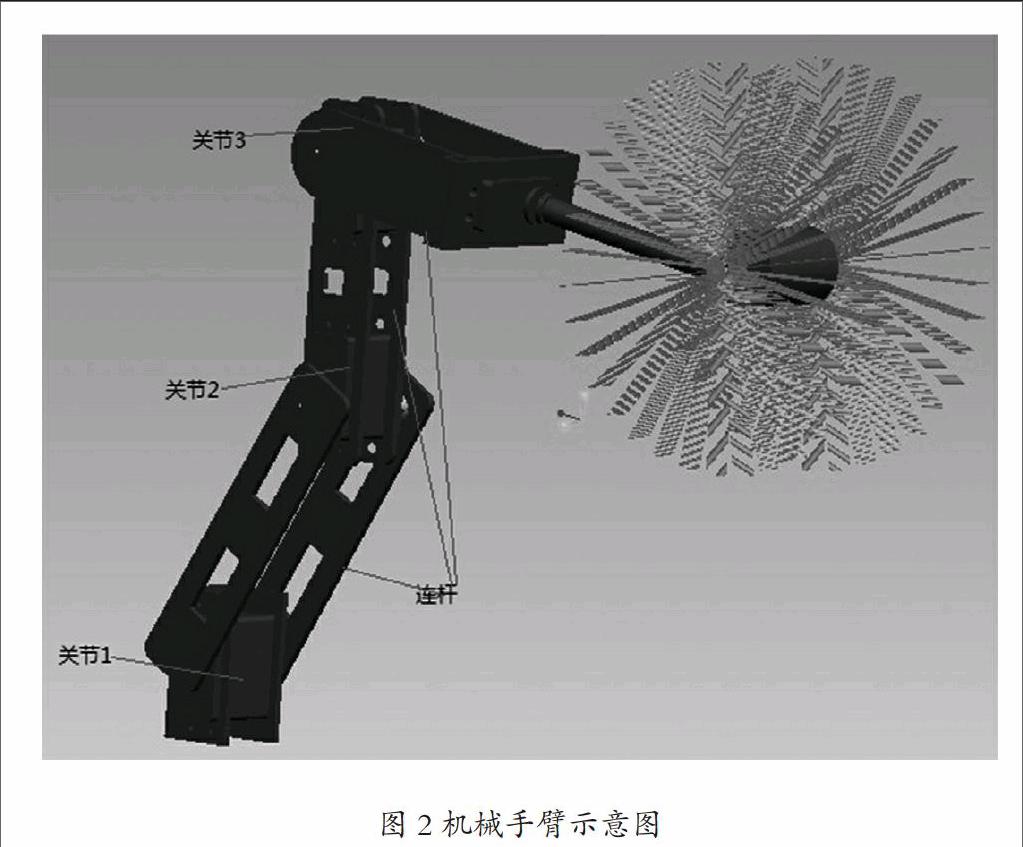
机械臂(图2)由3个旋转关节、2个手臂构成,前臂于机械手相连。其中,关节一绕运动平台垂直方向旋转,即在垂直与X-Y面旋转,从而使得机械手臂能够在水平面内运动;关节二、三分别代表肩关节和肘关节,能够保证机械臂在垂直面内运动,即Y-Z面内。三个关节自由度分布及三维仿真模型。
机械手臂库的设计:
为满足蜘蛛机器人复杂工作环境和特殊工作任务的需要,不仅需要给蜘蛛机器人配备以上两种机械手臂,还需要配备能满足各种作业需求的手臂。更进一步提高蜘蛛机器人的实用性,也足以能应对任务执行中遇到的各种问题。如图3所示为各种不同场合所需机械手臂库。
由于机器人使用于管道、废墟等复杂环境,因此需要配有视觉系统来控制机器人的运动以及搜救。通过设计配制摄像头及远程控制方式,来控制昆虫机器人的视觉判断。机器人所携带的视觉系统可以对所处环境有一定的识别,而身处其外的工作人员需要对管道情况进行监控,必须要通过昆虫机器人所携带的视觉系统传回图像,再对所收回的图像进行分析并作出决策,传给机器人,使其执行搜救的决策。
结语
这款蜘蛛机器人具有以下三大特点:
一是真正的仿生机器人,其动作及外形都是根据蜘蛛外形设计研究而成。
二是采用攀爬式运动机构,能成功的越过更多障碍,并且能在狭小空间里实现三维动作,提高机器人的工总性能和工作用途。
三是具有强大的机械手臂,既能用于管道探测,也能用于救援、侦察、排爆等集众多功能与一身的强大机器人。
参考文献
[1]孙桓,陈作模.机械原理(第六版)[M].北京:高等教育出版社,2001.
[2]邹慧君.机械原理课程设计手册[M].北京:高等教育出版社,1998.
[3]裴仁清.机电一体化原理[M].上海:上海大学出版社,1998.
[4](美)丹尼斯.克拉克.机器人设计与控制[M].北京:科学出版社,2004.
[5]陈恳.机器人技术与应用[M].北京:清华大学出版社,2006.
[6]濮良贵.机械设计(第八版)[M].北京:高等教育出版社,2006.
[7]赵淳生.超声电机技术应用[M].北京:科学出版社,2007.
作者简介:吴凯,男,1992年,本科,铜陵学院,指导教师:殷建。
