智能汽车自动紧急控制策略
2015-07-31朱西产
李 霖,朱西产
(同济大学 智能型新能源汽车协同创新中心,上海201804)
当前汽车安全技术的发展重心逐渐由被动安全向主动安全转移.传统的汽车主动安全技术以制动防抱死系统(Anti-Lock Braking System,ABS)和电子稳定控制系统(Electronic S
Tability Control,ESC)等车辆稳定性控制系统为代表,这类系统的典型特点是假设驾驶员是理想驾驶员,驾驶员的操作永远是正确的,系统控制的作用是让车辆的响应更好地跟随驾驶员的操作.
车辆稳定性控制技术和传统的被动安全技术已基本解决了车辆自身的安全问题,但交通事故仍然大量发生,根本原因在于驾驶员.研究表明,约93%的交通事故都是由于驾驶员的错误操作导致[1].为了进一步提高道路交通安全性,帮助驾驶员减少错误操作,以先进驾驶辅助系统(Advanced Driver Assistance Systems,ADAS)为代表的智能汽车安全技术逐渐得到重视和发展.
ADAS系统根据雷达、摄像头等传感器探测环境信息,当发现驾驶员当前的操作有导致事故的危险时,系统向驾驶员发出信息提示或预警,提醒驾驶员纠正驾驶行为回避危险.在紧急工况下,由于留给驾驶员的反应时间很少,一些系统通过主动介入对车辆进行控制,帮助驾驶员回避或减轻事故造成的危害.德国联邦交通研究所(BASt)的研究表明,70%的严重交通事故都可以通过ADAS避免[2].
在紧急工况下,当前最有代表性的ADAS系统是自动紧急制动系统(Autonomous Emergency Braking,AEB).AEB系统在碰撞危险非常高时通过紧急制动来避免碰撞或减轻碰撞程度.这类系统已经较为成熟,比如VOLVO的CITY SAFETY系统[3]、Mercedes-Benz 的 PRE-SAFE 系 统[4].2014年,欧盟新车认证程序(Euro-NCAP)中也引入了对AEB城市系统(AEB CITY)和AEB公路系统(AEB Inter-Urban)的测试和评价[5].根据 Euro-NCAP的测试,AEB可以避免27%的交通事故,并且能够很大程度降低碰撞事故中人员受伤害的程度.为了进一步完善AEB的控制策略,本文结合驾驶员在紧急工况下的行为以及不同避撞方式的效能对AEB系统控制策略进行了分析,提出了一种集成制动控制和转向控制的自动紧急控制策略,以对驾驶员提供更为全面的辅助,提高避撞效能.
1 AEB控制策略分析
AEB系统代表了当前ADAS系统在紧急工况下的典型控制策略.该系统在检测到车辆前方出现碰撞危险时,通过声音、图像以及制动顿挫等方式向驾驶员发出预警,提醒驾驶员采取措施回避碰撞.随着危险程度的上升,如果驾驶员没有及时对警告信号做出正确的反应,系统进行部分制动,在降低车速的同时提醒驾驶员.当碰撞危险变得十分紧急,碰撞无法避免时,系统通过自动完全制动来减轻碰撞的程度[6].
AEB系统在驾驶员无干预或有制动干预但制动强度不够时能够有效帮助驾驶员避免事故或减轻事故的伤害,但如果在介入时驾驶员有非预期行为(比如转向、加速等操作),无论驾驶员的操作是否正确,AEB系统都会自动取消介入并将控制权完全交还给驾驶员.因此,AEB的控制策略本质上讲是一种开环控制策略,驾驶员不在环,驾驶员的操作输入只是作为系统控制策略的一个干扰量.这种保守的控制策略虽然帮助企业回避了责任问题,但同时也丧失了安全效能.
但实际在危险工况下,相当一部分驾驶员会采取转向避撞操作.Eckert等[7]对驾驶员在紧急状态下的驾驶行为进行了研究,发现在TTC(Time-To-Collision,相对距离除以相对速度)较大时,驾驶员更多的倾向于采取制动避免碰撞.但当TTC减小时,更多的驾驶员采取了转向以及转向同时制动的避撞操作,这种趋势在障碍物与本车重叠率较小时更为明显(图1).这说明转向避让是驾驶员在紧急工况下的一种自然反应,但这种紧急转向行为很难控制,驾驶员通常没有足够的经验应付,往往过晚转向导致小偏置碰撞、过激转向导致越出车道、过激转向同时制动导致失稳等后果[8],使得发生更为严重的事故,我国的重特大事故中相当一部分也都源出于此[9].因此,有必要对驾驶员的紧急转向行为进行辅助.

图1 驾驶员在紧急工况下的避撞行为[7]Fig.1 Drivers’collision avoidance behaviors under emergency conditions
同时,从避撞效能出发,转向避撞在很多情况下相对于制动避撞更为有效,因为转向避撞所需的纵向距离小于制动避撞所需的纵向距离,当通过制动无法避免碰撞时,往往还可以通过转向进行避撞(图2).


本文通过质点车辆模型对制动和转向的避撞效能进行分析.如图3所示,将车辆视作一个质点,车辆坐标系为xoy,x轴沿车辆纵向指向车辆前进方向,y轴沿车辆侧向指向车辆左侧,车辆在世界坐标系XOY中具有X,Y两个运动自由度.
车辆在XOY坐标系下的运动微分方程为

式中:m为车辆质量;ψ为车辆航向角,即车辆坐标系x轴与世界坐标系X轴之间的夹角;Fx和Fy为实际作用在车辆上的轮胎力.
轮胎力Fx和Fy受到轮胎摩擦圆的约束,因此,车辆的加速度应满足如下关系:

式中:ax,ay分别为车辆的纵向和横向加速度;ax,max,ay,max分别为车辆纵横向最大加速度.ax,max=μg,μ为道路摩擦系数,g为重力加速度.ay,max受到道路摩擦系数和车辆抗侧翻性能要求的影响,通常情况下ay,max<μg.
引入状态变量z,z=[X,Y,vX,vY]T,vX,vY为车辆沿X轴和Y轴的速度,vX=X·,vY=Y·.车辆的状态方程为

系统输入u=[Fx,Fy]T.设驾驶员开始避撞行为的时刻为零时刻,车辆的初始状态为X(0)=X0,Y(0)=Y0,vY(0)=vY0,vX(0)=vX0.避撞结束时刻为T,车辆在T时刻的状态为X(T)=XT,Y(T)=YT,vY(T)=vYT,vX(T)=vXT.为求最短纵向避撞距离,即求输入u使得XT最小.设初始时刻状态变量Y0=0,vY0=0,求目标函数.
考虑3种情况:
(1)制动避撞,即输入Fy=0,车辆最终状态为YT=0,vXT=0.
(2)转向避撞,即输入Fx=0,车辆最终状态为YT=b,b为车辆避撞所需的侧向距离,vYT=0,即车辆避撞完成后侧向速度为0.
(3)制动+转向避撞,YT=b,VYT=0.
设车辆质量m=1 000 kg,道路摩擦系数μ=0.8,车辆避撞所需的侧向距离b=3.0 m,车辆最大纵向加速度ax,max=0.8g,不考虑侧翻,车辆最大侧向加速度ay,max=0.8g.采用 Tomlab的PROPT软件计算不同避撞方式所需的纵向距离[10],结果如图4所示.可以看出,在低速时,制动避撞所需距离更短,但当车速高于69.4 km·h-1时,转向避撞所需的纵向距离更短.转向的同时制动能够进一步减小纵向避撞距离,当车速高于59.6 km·h-1时,制动+转向的避撞方式所需纵向距离小于制动避撞距离.

图4 纵向避撞距离(μ=0.8,b=3.0 m)Fig.4 Required longitudinal distances for collision avoidance(μ=0.8,b=3.0 m)
保持其他条件不变,设道路摩擦系数μ=0.3,不同避撞方式所需的纵向避撞距离如图5所示.当道路摩擦系数降低时,转向避撞相对于制动避撞的避撞潜力优势更为明显.当车速高于43.6 km·h-1时,转向避撞所需的纵向距离比制动所需的纵向距离更短,转向同时制动能够进一步减小避撞所需纵向距离,相对于制动避撞的临界车速为38.1 km·h-1.
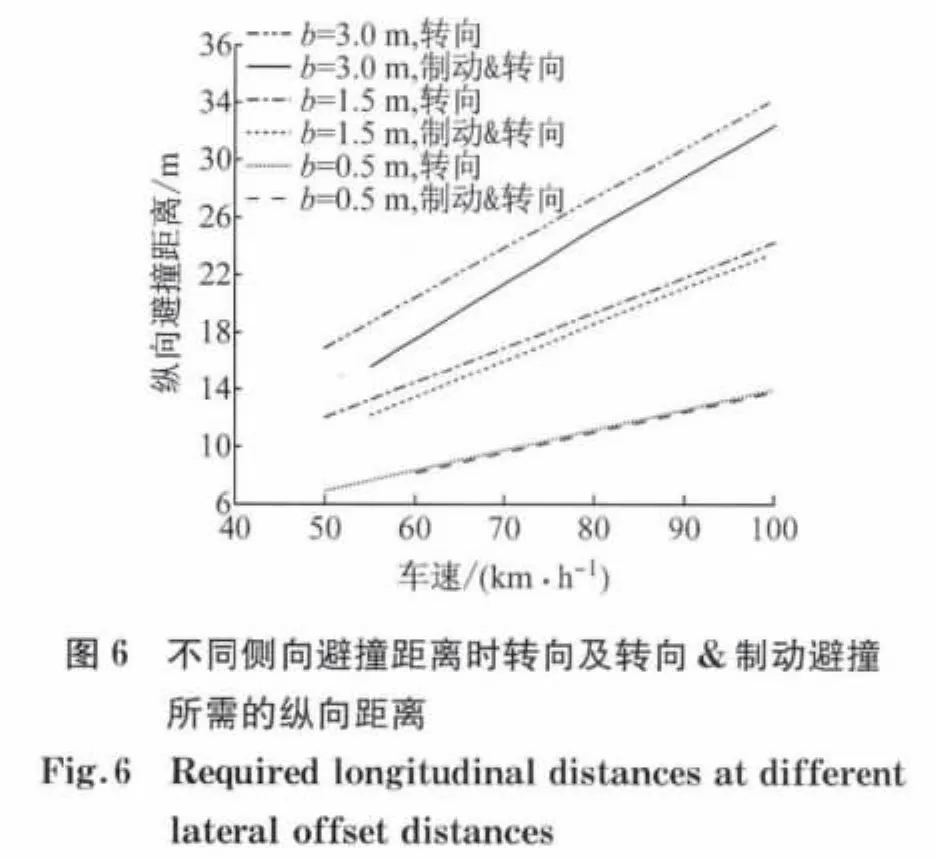
保持道路摩擦系数μ=0.8,设转向避撞所需的侧向位移b分别为3.0 m,1.5 m和0.5 m,3种情况下转向避撞及转向同时制动避撞所需纵向距离如图6所示.当避撞所需的侧向位移减小时,所需的纵向避撞距离也相应减小.由于制动避撞距离与障碍物的侧向偏置距离无关,因此当避撞所需的侧向位移更小时,转向避撞具有更大的优势,这种趋势在高速时更为明显.转向同时进行制动能够减小避撞距离,但这种趋势随着侧向所需位移减小而减弱.

从以上分析可知,转向避撞在高速、低重叠率、低附着系数等工况下所需的纵向制动距离比制动避撞所需纵向距离要短,往往在制动无法避免碰撞时,通过转向(或转向同时制动)还能够避免碰撞,因此引入转向控制可以进一步提高避撞的能力.
同时,从用户调查看,转向避撞辅助也是用户的一种需求,用户认为其重要程度甚至超过了当前主流的低速 AEB系统[11].
从以上的分析可以看出,在紧急情况下驾驶员进行转向操作是一种自然反应,这种自然反应往往导致更为严重的事故;但在高速、低重叠率、道路湿滑等工况下转向操作的避撞潜力大于制动避撞;并且用户对紧急情况下的转向辅助需求迫切.因此在当前AEB自动紧急控制策略基础上引入转向控制是未来智能汽车紧急控制的方向.
目前国际上已经开始了转向避撞控制策略的研究,比如Continental的紧急转向辅助(Emergency Steering Assist,ESA)系 统[7],Bosch 的 Evasive Steering Support(ESS)系统[12]等,这些系统的控制策略非常类似,系统的介入必须满足3个条件:
(1)通过制动无法避免碰撞.
(2)转向可以避免碰撞.
(3)驾驶员有转向避撞操作.
这种控制策略中,驾驶员依然不在环,驾驶员的转向输入只是作为系统的一个触发条件.系统介入后会接管车辆的控制权,让车辆沿预先设定好的路径行驶.这样的策略可能会对驾驶员造成较大的干扰,因为驾驶员不一定想沿系统设定的路径行驶.
2 智能汽车自动紧急控制策略
本文提出一种集成制动控制和转向控制的自动紧急控制(Autonomous Emergency Control,AEC)策略,用于在紧急工况下帮助驾驶员纠正驾驶行为,辅佐驾驶员回避危险或减轻危险的程度.AEC策略的介入原理是根据驾驶员的输入并结合驾驶员模型得到车辆的预期轨迹,同时根据传感器信息融合构建道路环境模型得到车辆可行域(drivable space)、过渡域和危险域.可行域是指车辆能够稳定到达且不会发生碰撞(或越出车道)事故的区域;过渡域指虽然车辆不会发生事故,但安全裕量较小,稍有偏差就会发生事故的区域;而危险域是指车辆发生事故可能性非常高的区域.如图7所示,如果车辆预期轨迹进入了危险域,说明驾驶员的操作为不当,需要通过AEC进行纠正,避免事故的发生或减轻事故的伤害.如果车辆预期轨迹在过渡域内,驾驶员的操作为危险驾驶行为,需要对驾驶员进行预警.如果车辆预期轨迹在车辆可行域内,则驾驶员的操作是正确操作,系统无需介入.

图7 AEC系统的介入原理Fig.7 Intervention principle of AEC
在AEC中,驾驶员始终在环,AEC的控制输入根据驾驶员的输入进行实时调整,并最终与驾驶员的输入叠加在一起,作为车辆的总输入.AEC的控制系统框架如图8所示.
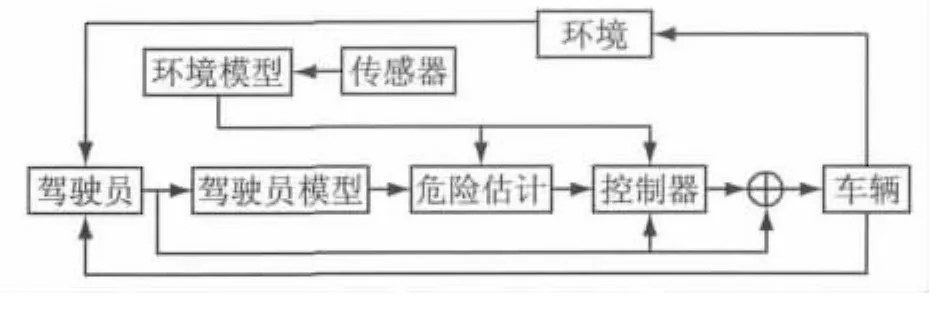
图8 AEC控制框架Fig.8 Control framestruce of AEC
2.1 车辆模型
本文采用单轨自行车模型来设计控制策略,如图9所示.车辆的运动可以用以下微分方程表示.
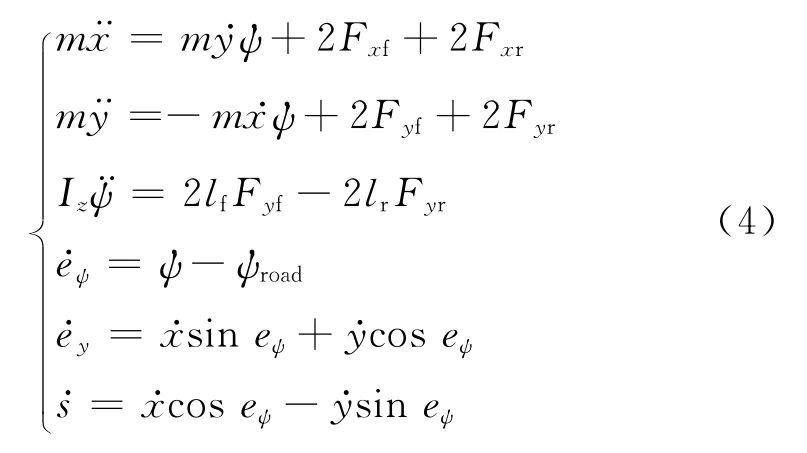

图9 单轨车辆模型Fig.9 Single track model
式中:m为车辆质量;Iz为车辆绕z轴的转动惯量;lf,lr分别为车辆质心到前轴和后轴的距离;x·,y·为车辆的纵向和横向速度;ψ·为车辆的横摆角速度;ey为车辆质心到车道中心线的垂直距离;eψ为车辆航向角ψ与车道中心线切线与世界坐标系XOY的X轴之间的夹角ψroad的差值;s为车辆沿车道中心线的纵向位置;Fxf,Fxr分别为前后轮轮胎力在车辆纵向上的分力;Fyf,Fyr分别为前后轮轮胎力在车辆侧向上的分力.Fxf,Fxr,Fyf,Fyr根据车轮纵向力和侧向力得到.

式中:fxi,fyi分别表示车轮i的纵向力和侧向力,i为f,r,分别表示前轮和后轮;δi表示车轮i的转向角,本文中假设车辆只有前轮转向,因此δr=0.
为了提高计算效率,本文中采用Fiala轮胎模型来计算车轮力[13].根据Flala模型,轮胎的纵向力和侧向力是制动率ρ、轮胎侧偏角α、道路摩擦系数μ以及轮胎法向力Fz的函数,即

式中:ρ∈[-1,1]表示制动率,ρ=-1对应全制动,ρ=1对应全油门加速,本文中因只考虑制动,因此ρ∈[-1,0].最终车辆模型可以写成如下形式

式中:ξ=[x·,y·,ψ·,eψ,ey,s]T;u=[δf,ρ]T.对式(7)进行欧拉离散化处理,得到车辆模型的离散方程为

2.2 环境模型
环境模型主要通过环境感知(situation awareness,SA)向控制策略提供与本车运行相关的道路环境信息.按照Endsley的定义[14],环境感知指探测在一定空间和时间内的环境元素,理解这些元素的含义,并预测这些元素在不久的将来的状态.通过环境模型,可以得到与本车运行相关的其他车辆、行人等障碍物以及道路曲率、车道线等当前信息及未来演变的可能,通过这些信息推导出车辆的可以安全通过的区域,即车辆的可行域.
车辆的可行域需满足以下3个条件:
(1)车辆不会越出道路.
由上一节中得到的车辆模型,设eψ,ey分别为车辆航向角以及车辆位置与车道中心线之间的偏差.车辆的外形用矩形表示,车辆质心到车身前端的距离为a,到后端的距离为b,车身宽度为c,设eyi为车身4个角点与车道中心线的垂直偏差,i∈{1,2,3,4}分别表示车身的左前、右前、左后、右后4个角点.

为保证车辆不越出车道,车辆与车道中心线的偏差必须保持在一定的范围内,即

根据不同的应用场合,eymin和eymax取值不同,比如对于车道保持,eymin和eymax为车道线的边界,而对于避撞,车辆可以占用其他车道来完成避撞操作,eymin和eymax为道路的边界线.
(2)车辆保持稳定.
在紧急工况下,驾驶员可能伴有剧烈的转向或转向同时制动的避撞行为,在这种情况下,即使车辆配备有ESC系统,由于车辆的响应已经超过了ESC的安全裕度,车辆依然有可能失稳.车辆失去稳定性后驾驶员无法对车辆进行控制,往往导致更为严重的交通事故.因此,车辆可行域的另一个典型特征是车辆在该区域内行驶时不会失稳.

式中:E1,E2为常数.当然,更理想的情况是将轮胎力保持在线性区域内,此时普通驾驶员也有能力对车辆进行有效的控制,这可以通过限制轮胎侧偏角的大小来保证[16]

(3)避撞.
在保证车辆不越出道路以及车辆保持稳定的前提下,避撞是自动紧急控制最主要的目的,因此车辆的可行域应保证车辆不会与障碍物发生碰撞.
如图9所示,在s-ey坐标系中,车辆形状用矩形表示,行人、骑车人等目标用椭圆表示,属于本车车身上的所有点用仿射空间表示,则

为了避撞,自车车身矩形与目标车车身矩形应当无交集,即本车车身上所有点满足

本文用椭圆表示行人、骑车人等目标的形状,为了避免与这类目标发生碰撞,本车车身上所有点应满足

式中:(sk,ey,k)为目标k中心点坐标;ak为目标k椭圆的长轴;bk为目标k椭圆的短轴.
综合道路保持、车辆稳定和避撞3方面的要求,车辆的可行域可表示为

由离散车辆模型(8),得到k时刻车辆的安全约束为

为了保证后续开发的自动紧急控制策略的稳定性,此处对车辆可行域约束条件进行松弛,因此定义松弛变量ε,ε为很小的非负常数,得到

该约束方程定义了k时刻车辆可以安全通过的区域的集合,即k时刻车辆的可行域,记为Ck.
2.3 驾驶员模型
研究驾驶员模型的目的是对驾驶员的当前操作行为进行辨识,并对驾驶员未来的操作行为进行估计,再结合车辆的动力学模型,估计得到车辆的预期轨迹.
根据车辆模型ξ(k+1)=fd(ξ(k),u(k)),设t时刻车辆的状态ξ(t)能够通过测量或状态估计得到,驾驶员在t时刻的输入为u(t).通过驾驶员模型,可以估计得到t时刻后k个采样时刻驾驶员的输入为ut+k,t.此处需注意区分不同的符号所代表的含义,ut+k,t为根据t时刻驾驶员的输入并结合驾驶员模型估计得到t+k时刻驾驶员的输入,而u(t+k)表示驾驶员在t+k时刻的实际输入.因此,驾驶员从t时刻到t+k时刻的估计输入序列为Ut={ut,t,ut+1,t,…,ut+k,t},其中ut,t=u(t).结合车辆模型,可得到车辆从t时刻到t+k时刻的预估轨迹为Tt={ξt,t,ξt+1,t,…,ξt+k,t}.
通常情况下驾驶员模型无法精确地对驾驶员行为进行表述,而是存在一定的误差,因此本文引入集合Ξ表示车辆轨迹的集合,即

取α=0.05,表示车辆的轨迹有95%的可能性包含在集合Ξ内.
2.4 自动紧急控制
从t时刻到t+k时刻车辆的可行域集合为C=,如果驾驶员的预期操作正确,车辆的预期轨迹集合Ξ将保持在车辆可行域C中,即Ξ⊂C.如果车辆预期轨迹越出了车辆可行域,即Ξ∩C≠∅时,说明驾驶员的行为存在不当之处,需要通过预警或控制介入对驾驶员的行为进行纠正,保证车辆的安全性.因此,自动紧急控制(AEC)的输入是车辆预期轨迹和车辆可行域的函数,即控制介入

AEC的控制特点是根据驾驶员模型和环境模型估计驾驶员的操作是否会导致事故,如果发现有存在发生事故的可能性,则通过控制输入对驾驶员的操作进行纠正和补偿,保证车辆的安全.AEC的控制问题可以转换为模型预测控制(Model Predictive Control,MPC)的问题,模型预测控制对于处理避撞这类多约束的非线性最优化问题有其独有的优势.如图10所示,在每个采样时刻,MPC计算一个有约束有限时间最优控制问题(Constrained Finite Time Optimal Control Problem,CFTOC)得到一个最优控制序列,但只将该控制序列的第一个值作为系统输入,在下一采样时刻重复进行该过程,实现滚动优化[17].式中:U表示由于执行器物理特性导致的控制输入约束;ΔU表示控制输入梯度约束;Np为预测区间;ξref为路径规划得出的参考路径;Q,R,S,λ分别表示对路径与参考路径的偏差、控制输入、控制输入梯度以及柔性约束的惩罚权重.其中S的权重相对于R更大,即在保证将车辆控制在可行域的前提下,最小化制动或转向的输入变化率.当驾驶员没有采取转向避撞操作时,以制动控制为主,转向控制主要用于保证车辆稳定性.反之,当驾驶员有转向避撞操作时,系统以转向控制为主,制动控制更多的用于稳定性控制.

图10 模型预测控制示意图Fig.10 Model predictive control
在任意采样时刻t,可构建如下最优化问题求解AEC的控制输入


图11 AEC控制效果示意图Fig.11 Control effects of AEC
求解上述方程,可以得到在当前驾驶环境下对应 于 驾 驶 员 预 测 输 入 序 列的控制输入序列但只有控制序列的第一个元素作为系统输入.在t+1采样时刻,重复进行上述过程.AEC控制效果如图11所示,本文按照Biral提出的“最大转向角速度最小(Minimum Jerk)”的原则[18]通过求解最优控制问题得到驾驶员模型输入(图11 c),并且忽略驾驶员模型的误差.有无AEC控制时车辆的轨迹如图11 b所示,可见无AEC介入时驾驶员转向不足,导致与前车发生小偏置碰撞,AEC根据驾驶员模型的输入,通过控制输入对驾驶员的操作进行纠正,控制输入叠加在驾驶员的输入上,在避免碰撞的同时保证了稳定性.
3 结论
在紧急情况下,驾驶员通过转向操作进行避撞是一种自然反应,这种自然反应往往导致更为严重的事故,当前以自动紧急制动系统(AEB)为代表的紧急制动控制策略在驾驶员转向时取消介入,无法对驾驶员提供辅助,因此不能满足未来智能汽车安全技术的需要.同时在高速、低重叠率、低附着系数等工况下,转向避撞的避撞能力大于制动避撞,并且用户对紧急情况下的转向控制需求迫切,因此有必要在当前的AEB自动紧急控制策略基础上引入转向控制.
本文提出了一种集成制动控制和转向控制的自动紧急控制(AEC)策略,该策略融合了驾驶员模型信息、道路环境模型信息和车辆信息,通过对车辆预期轨迹和车辆可行域进行对比分析,发现驾驶员的不当驾驶行为,并通过协调制动和(或)转向控制输入对驾驶员的行为进行纠正.
[1] Treat J R,Tumbas N S,Mcdonald S T,et al.Tri-level study of the causes of traffic accidents[R].Ann Arbor:Transport Research Institute(UMTRI),1979.
[2] Vollrath M,Briest S,Schieβl C,et al.Ableitung von Anforderungen an Fahrerassistenzsysteme aus Sicht der Verkehrssicherheit[R].Bergisch Gladbach:BAST,2006.
[3] Distner M,Bengtsson M,Broberg T,et al.City safety—a system addressing rear-end collisions at low speeds[C/CD]//Proceedings of the 21st International Technical Conference on the Enhanced Safety of Vehicles(ESV).Washington D C:NHTSA,2009.
[4] Bogenrieder R,Fehring M,Bachmann R.Pre-Safe®in rearend collision situations[C/CD]// Proceedings of The 21st International Technical Conference on the Enhanced Safety of Vehicles Conference(ESV).Washington D C:NHTSA,2009.
[5] European New Car Assessment Program(Euro-NCAP).Test protocol– AEB systems,version 1.0 [S].Brussels:Euro-NCAP,2013.
[6] Maurer M.Forward collision warning and avoidance [M].Berlin:Springer,2012.
[7] Eckert A,Hartmann B,Sevenich M,et al.Emergency steer &brake assist:a systematic approach for system integration of two complementary driver assistance systems[C/CD]//Proc 22nd Int Technical Conf Enhanced Safety of Vehicles.Washington D C:NHTSA,2011.
[8] Malaterre G,Ferrandez F,Fleury D,et al.Decision making in emergency situations[J].Ergonomics,1988,31(4):643.
[9] 公安部交通管理局.中华人民共和国道路交通事故统计年报(2011年度)[R].北京:公安部交通管理局,2012.Traffic Management Bureau of the Ministry of Public Security.Annual report of road traffic accident statistics of the People's Republic of China(2011)[R].Beijing:Traffic Management Bureau of the Ministry of Public Security,2012.
[10] Rutquist P E,Edvall M M.Propt-matlab optimal control software[R].Seattle:Tomlab Optimization Inc,2009.
[11] Robert Bosch Gmb H.Chassis systems control driver assistance systems—how much support do German drivers want?[R].Heilbronn:Robert Bosch Gmb H,2012.
[12] Fausten M.Accident avoidance by evasive manoevres[C/CD]//Proceedings of the 4th Tagung Sicherheit durch Fahrerassistenz(TVSD). Munich:TÜV SÜD Akademie Gmb H,2010.
[13] Hindiyeh R Y,Gerdes J C.Equilibrium analysis of drifting vehicles for control design[C]//ASME 2009 Dynamic Systems and Control Conference.Hollywood:American Society of Mechanical Engineers,2009:181-188.
[14] Endsley M R.Toward a theory of situation awareness in dynamic systems [J].Human Factors:The Journal of the Human Factors and Ergonomics Society,1995,37(1):32.
[15] Inagaki S,Kshiro I, Yamamoto M.Analysis on vehicle s
Tability in critical cornering using phase-plane method[C]//Proceedings of the International Symposium on Advanced Vehicle Control 1994.Tsukuba-shi:Society of Automotive Engineers of Japan,1994:287-292.
[16] Falcone P.Nonlinear model predictive control for autonomous vehicles[D].Benevento:University of Sannio,2007.
[17] Rawlings J B,Mayne D Q.Model predictive control:theory and design[M].London:Nob Hill Pub,2009.
[18] Biral F,Da Lio M,Bertolazzi E.Combining safety margins and user preferences into a driving criterion for optimal controlbased computation of reference maneuvers for an ADAS of the next generation[C]//IEEE Intelligent Vehicles Symposium.Washington DC:IEEE,2005:36-41.