水电厂筒阀的故障原因分析及其处理对策
2015-07-28王忠海吴云波肖瑞怀华能澜沧江水电有限公司漫湾水电厂云南临沧675805
王忠海,吴云波,肖瑞怀(华能澜沧江水电有限公司漫湾水电厂,云南 临沧 675805)
水电厂筒阀的故障原因分析及其处理对策
王忠海,吴云波,肖瑞怀
(华能澜沧江水电有限公司漫湾水电厂,云南 临沧 675805)
摘要:筒阀作为水轮发电机组进水阀的一种类型越来越广泛应用于各大、巨型水电站,它具有开启、关闭快速高效,关闭严紧等一般的蝶阀或球阀所不具备的功能和优点。但在实际的应用中,筒阀运行时要求具有高可靠性,通过对漫湾1号机组筒阀控制程序的解读,结合筒阀检修调试数据及波形,分析了筒阀卡阻和失步的原因,并提出了相应的处理对策。望能为国内筒阀运行和检修提供一定的经验。
关键词:筒阀;卡阻;失步;纠偏;接力器不动时间
1 筒阀原理
筒阀是在水轮发电机组进水系统主进水阀中普遍应用的一种类型,安装在固定导叶与活动导叶之间;其开启和关闭的控制采用多只直缸接力器来操作,以实现输入水轮机水流流通和截断。筒阀开、关迅速高效可以大大缩短机组开停机时间,同时它关闭严密,在机组停机时减少了机组导叶的漏水量,防止了导叶关闭不严造成的机组蠕动,方便了维护。
漫湾电厂1号机组的筒阀为电液同步机构型,由机械同步控制和电液同步控制两部分组成,其中机械同步控制是通过操作压力油流自动驱动6只同轴等排量分配马达,使通往6只直缸接力器的流量相等,以保障其运动速度基本相同。电液同步控制是由安装于6只直缸接力器的6只位移传感器、6个高速开关调节电磁阀和PLC控制器实现,当PLC控制器检测任一根传感器的位移大于位移基准量的某一定值(1.5mm)时,PLC控制器输出脉冲信号使相对应的高速开关调节电磁阀动作,使与高速开关调节电磁阀相对应的接力器有杆腔排油纠偏,从而实现超出失步定值的接力器流量与位移基准量的流量均等,使筒阀开启或关闭过程同步。
2 筒阀故障类型
对漫湾电厂1号机组筒阀故障统计,自2007年5月18日投运以来,筒阀发生故障类型主要为失步故障和卡阻故障两种类型,横向对比澜沧江流域各电站同类型筒阀出现的故障类型,也主要为上述两种故障。
2.1失步故障
筒阀的控制难点之一是其操作机构的同时性和同步性,尤其同步是整套设备的设计、制造、安装和调试技术关键点。一旦出现事故或者容错能力不足,就会带来严重后果。失步故障报警在控制程序中表述为6只接力器位移中最大一只接力器的位移数值与最小一只接力器的位移数值之差大于失步定值(10mm)时,报筒阀失步。
2.2卡阻故障
卡阻故障也是在筒阀调试和运行中比较常见的一类,出现的频率较多,一般是可以快速查清故障源和处理的。其故障报警在控制程序中表述为PLC控制器收到开启或关闭筒阀令后,筒阀在开启或关闭过程中,任意10s内6只接力器位移的算术平均值变化不超过1mm,报筒阀卡阻,即筒阀运动时才会出现机械卡死现象。
从运行统计分析,筒阀卡阻报警均是在筒阀刚开始运动的时刻发生的。
3 故障原因分析及对策
3.1失步、卡阻故障原因分析
3.1.1纠偏效果不满足控制要求引起筒阀失步
漫湾电厂1号机组筒阀纠偏功能选用6只接力器的算术平均值作为位移基准量,当任一根接力器位移超过算术平均值1.5mm时,控制程序通过对接力器有杆腔排油,实现筒阀电液同步纠偏。该纠偏控制以算术平均值作为纠偏的位移基准量,只能对大于平均值且超出纠偏定值的接力器进行纠偏,不能对小于平均值的接力器进行纠偏。
假设出现临界纠偏状态,即假设平均值为1000mm,任意5只接力器位移均等于1001.5mm,则剩余1只接力器的位移为992.5mm。因此,6只接力器位移传感器中最大值与最小值之差为9mm,这一临界极端状态下,由于没有超过纠偏定值,因此纠偏功能不起作用。
由此可知,以算术平均值为纠偏位移基准量,纠偏频率低,纠偏效果不明显,且处于临界纠偏状态时,最大位移值与最小位移值之差为9mm,接近失步定值,再加之控制系统和高速开关调节电磁阀纠偏动作的滞后性,容易出现筒阀失步故障现象。
3.1.2液压管路高压油冲击导致筒阀失步
筒阀在开启或关闭时刻,筒阀接力器会受到高压油流冲击,而各个接力器的管路长度和接力器缸体内原有压力略有差异,受到高压油流冲击也不一致,因此,在状态变化瞬间各个接力器的位移变化量也不同,从而导致各个接力器之间的位移存在较大的短暂偏差。随着高压油流量的稳定,各接力器之间的偏差也迅速变小。尤其是在筒阀长时间处于全开状态,关闭筒阀瞬间时,这种短暂偏差达到最大值,甚至超过筒阀失步定值,导致筒阀出现失步故障。具体过程和偏差数值见图1。
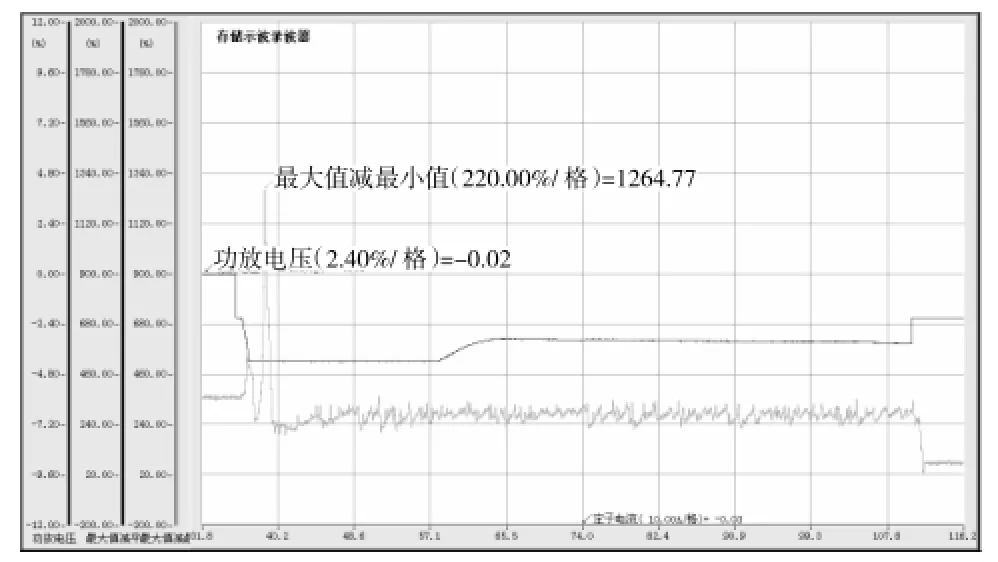
图1筒阀关闭过程故障录波图
3.1.3筒阀接力器不动时间过长引起筒阀卡阻
筒阀收到开启或关闭令至筒阀接力器开始动作时刻的时间,称为筒阀接力器不动时间。
经过验证,漫湾电厂1号机组筒阀接力器不动时间最大为9.56s(见图2)。主要原因是筒阀在接到动作信号后,PLC控制器将按照PI调节规律将0~5V输出电压逐渐送至功放模块,由于参数的限制,该段用时8s,从而导致接力器不动时间变大。从筒阀运行统计分析,筒阀卡阻报警均是在筒阀始动的时刻发生,由此可知该报警是由于筒阀接力器不动时间过长,造成筒阀收到开启或关闭命令后超过10s动作量小于1mm,从而发生卡阻报警,这是控制系统设置筒阀卡阻报警信号不符合实际设备运行工况所致。

图2筒阀不动时间录波图
3.2失步、卡阻故障处理对策
3.2.1失步故障处理措施
针对不同故障原因,需要采取相应的处理对策以避免或减少故障的发生,现场对漫湾1号机组筒阀控制系统失步故障采取如下措施:
在筒阀接力器刚开始动作时刻,暂时退出筒阀失步判断,以躲过油流冲击引起最大偏差,而后再投入筒阀失步判断。
以算术平均值为纠偏位移基准量改成以最小位移值作为纠偏位移基准量进行纠偏。
经验证,以算术平均值作为纠偏位移基准量时,测得最大值与最小值的偏差达到6.10mm的最大偏差(见图3)。以最小位移值作为纠偏位移基准量时,

图3筒阀最大值与最小值的偏差1录波图
测得最大值与最小值的偏差达到2.78mm的最大偏差(见图4)。
由于以最小位移值作为纠偏位移基准量,筒阀在运动过程中,所有接力器均参与纠偏,纠偏频率提高,纠偏效果明显,大大降低了最大偏差值。最大偏差值满足《水轮机筒阀基本技术条件》中3.9规定的要求。

图4筒阀最大值与最小值的偏差2录波图
3.2.2卡阻故障处理措施
经过对卡阻报警分析,现场对1号机组筒阀控制系统卡阻故障采取如下措施:在筒阀接力器刚开始动作时刻,才投入筒阀卡阻判据,即筒阀在运动过程中卡阻判据有效,筒阀静止时,卡阻判据自动退出。这样设计符合筒阀实际运行工况要求,不仅可以反应筒阀机械卡死,而且不会出现筒阀误报卡阻现象。
4 结束语
漫湾电厂1号机组筒阀发生失步和卡阻故障,原因是筒阀接力器不动时间过长、液压管路高压油冲击、纠偏效果不满足控制要求等。现场技术人员对控制程序作针对性优化后,对筒阀控制系统进行42次开启和关闭操作,筒阀未出现卡阻或失步故障现象,同时测得筒阀的最大偏差为2.78mm,远远小于筒阀控制程序优化前的6.10mm。最终结果满足筒阀同步要求,筒阀同步性得到较大的改善。
此次缺陷能够得以有效地解决,正是基于对数据的综合分析后作出了有针对性的处理和改进。
参考文献:
[1]GB-T30141-2013.水轮机筒阀基本技术条件[S].
[2]林洪德,张利民,杜江.漫湾二期水电站电液同步筒形阀结构设计[J].东方电机,2007(5).
[3]张利平.液压控制系统及设计[M].北京:化学工业出版社,2006.
中图分类号:TV732.7
文献标识码:B
文章编号:1672-5387(2015)01-0046-03
DOI:10.13599/j.cnki.11-5130.2015.01.015
收稿日期:2014-09-29
作者简介:王忠海(1984-),男,助理工程师,从事水电厂主机及自动化设备的运行、检修和管理等工作。