浅谈汽车后视镜视野测试方法
2015-07-27哈尔滨职业技术学院哈尔滨150081
刘 军(哈尔滨职业技术学院,哈尔滨 150081)
浅谈汽车后视镜视野测试方法
刘 军
(哈尔滨职业技术学院,哈尔滨 150081)
本文从交通安全角度出发,探讨了车辆驾驶过程中的后视镜性能的局限性,提出了通过三维数字技术建模分析驾驶视野的研究思路。并根据研究结果提出了了系统与常规车辆匹配安装的思路。可提高车辆和行人的安全性,获得一定的社会效益。因此车辆行驶视野扩展技术的研究在车辆安全保障方面有存在的必要性。
盲区;驾驶视野;交通安全
在上世纪90年代前全国大多数城市增容效果还未凸显,我国城镇化刚刚起步不久,主要街路不多,且路面较窄,路面上行驶车辆也少,大多数时间里整条街路上在视野范围内只有几辆车,在此情况下行人的避让和采取安全措施相对容易,车辆的驾驶过程中与其他车辆发生碰撞的几率较低。路面承载能力亦可满足车辆的需求。车辆上的盲区存在的危害在当时未能凸显并引起重视。
随着车保有量迅猛发展,道路情况变得日益复杂,道路上的车辆间距和人与车辆间距愈加缩小。现阶段,无论在正常行车还是泊车过程中由于盲区存在已经极大危害到路上行人和车辆的安全。尤其在一些特殊情况下,如车辆通过狭窄路口时,前后车距可缩短至1m,左右车距可缩短至0.5m甚至更小的距离。在此情况下驾驶员掌握车辆周围的情况已非常重要,视野范围需进一步扩大才可能进一步保证交通安全。因此,需要从车辆出厂的国家标准、车辆上道的相关管理规定层面提出进一步消除盲区的概念。另一方面,应该从技术层面考虑消除盲区,也是一个应投入精力研究的重要方向。
1 现有的汽车驾驶盲区测量方法
1.1 目视法
目视法是在眼点的位置设置眼点的标记装置,后视镜视野测试人员于眼点标记位置通过内、外后视镜观察目标物来进行测试的方法。由于眼点的位置是测试的基准,因此该测试方法要求眼点位置准确。期中眼点的位置可通过几种方法获得:三坐标测量仪、三维扫描仪、三维H点人体模型。需要观察的目标置于后视野范围要求的地面上。要求目标高度不低于车上相关后视镜的高度。优点是易行、简单,缺点是人为因素的影响较大。
1.2 摄影法
摄影法是通过相机拍摄车外的物体在后视镜中影像的方法。测试时,需要先确定眼点的位置,再将照相机的胶卷中心布置在的眼点位置上拍摄。是利用照相机来代替人眼的检测视野方法。其优点是较适合单眼的情况,对所得的成像的比较相对直观。缺点是难以确定照相机的位置,得到双眼的测试结果,需要将两个照片进行合成,而且这个过程易产生误差。
1.3 灯光投影法
灯光投影法是在确定的眼点位置上放置模拟眼睛的点光源,通过后视镜的反射光照到屏幕上,通过测量、计算对后视野进行评价的方法。
1.4 观察法
观察法是由灯光投影法发展来的。灯光投影法需要屏幕等装置,测试结果需要作图、计算,比较繁琐,观察法可省去部分步骤。观察法是在眼点位置布置模拟眼睛的点光源。灯光通过左右外后视镜反射到地面,在地面相关位置上放反射镜,再通过反射镜进行观察。如果在反射镜中看到点光源,则说明反射镜在可视区域,否则不在可视区。对于整个后视野的状况不能掌握;观察法适合单眼和双眼。直观、简单、易行;需要场地较大。
2 使用仿真软件建立车辆三维空间模型并对形成的盲区进行分析
由于上述测试视野范围的方法都受到场地设备等限制,在对与车辆驾驶视野相关的参数如后视镜视野范围、车身轮廓参数、后视镜安装角度、座椅调节范围等进行研究时并不方便和快捷。因此将整个车辆外形参数和视野范围制作成三维数据模型。产生了辅助设计,并使设计更加快捷和高效的效果。另外,方便更加直观的进行与交通安全相关的研究。
2.1 建模软件的简介
SolidWorks为达索系统(Dassault Systemes S.A)下的子公司,专门负责研发与销售机械设计软件的视窗产品。使用了直观式设计技术、Windows OLE技术以及先进的parasolid内核还有良好的与第三方软件的集成技术。
2.2 理论依据和数学工具
按照反求工程为指导思想,即“计算机三维造型技术和测量技术的支撑,工程技术人员可以通过实物样件快速获取工程设计概念和设计模型。再通过模型进行形体尺寸、布局和结构材料的选择等的结构分析。再进行包括装配工艺、加工工艺等制造工艺的分析”。通过空间点测量确定数据模型,逐步增加选取点滴密度,从而实现提高精度控制。
使用过的数学工具包括:
(1)坐标矩阵变换
新坐标轴在旧坐标系中的方向余弦:

九个方向余弦,实际上只有三个独立参数。
矩阵表示法:

实际上就是空间向量的正交分解合成法。
反过来,求旧坐标轴在新坐标系中的方向余弦,只需求原方向矩阵A的逆矩阵A-1即可。
|A|=±1:|A|=1为同手系变换,|A|=-1为异手系变换。|A|表示矩阵A的行列式。
[x、y、z]=[x'、y'、z']×A
[x'、y'、z']=[x、y、z]×A-1.
当|A|=1时,A-1=AT(转置矩阵),即A为正交矩阵。
(2)三维直角坐标系下法线平面、切平面确定
空间上一点(x0,y0,z0)的切平面方程为:

(3)使用matlab插值形成曲面和最小二乘法拟合曲面方法
插值和拟合都是数据优化的方法之一,实验数据不够多时常要用到这些方法来画图。在matlab中都有一些特定的函数来完成这些功能。这两种方法的区别在于:测量值没有误差是准确的时,用插值法;测量值与真实值有误差时用数据拟合法。一维曲线的插值,一般用函数yi=interp1(X,Y,xi,method) ,其中的method包括linear,nearst,cubic,spline。对二维曲面的插值,一般用函数zi=interp2(X,Y,Z,xi,yi,method),其中method常用的是cubic。对于一维曲线的拟合,一般用函数p=polyfi t(x,y,n)和yi=polyval(p,xi),是常用的最小二乘法的拟合方法。对二维曲面的拟合,可用Spline Toolbox里面的函数功能。
2.3 建模的方法和步骤
(1)坐标系的选取。依据ISO4130-1978《道路车辆三维参考系统和基准符号定义》和SAEJ182-2005《汽车基准符号和三维参考系统》确定坐标系。如图1
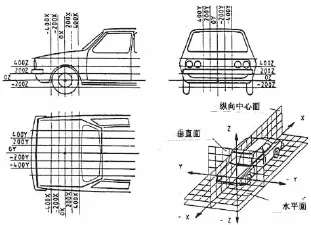
图1 坐标系建立示意图
在图1中,使X为汽车的长度方向,Y为宽度方向,Z为高度方向 。
Z方向坐标零线——有车架的车,一般取沿车架纵梁上缘上表面平直且较长一段所在平面作为高度方向坐标的零平面;无车架的车辆可沿车身地板下表面平直且较长一段所在平面作为高度方向坐标的零平面。 当车身无较长直线段(多为曲线时),取前轮理论中心线的水平线。零平面上方为正,零平面下方为负。
X方向坐标零线——将通过汽车前轮理论中心线并垂直于高度方向零平面的平面作为长度方向坐标的零平面。零平面前方为负,零平面后方为正。
Y方向坐标零线——把汽车的纵向对称中心平面作为宽度方向坐标的零平面。 零平面左侧为正,零平面右侧为负。
(2)通过三坐标测量仪的获得车辆在不同水平界面上沿车身外轮廓x轴方向选取15个点,y轴方向选取10个点,按照50mm长度在z轴上升高获得不同层的数据直到车辆顶部。输入完成车辆外部轮廓的曲面的建立。
(3)驾驶员眼点确定。根据总体布置的要求所确定的驾驶员设计乘坐位置中心,作一平行于汽车纵向基准面的平面。从该平面内的驾驶员 R 点垂直向上 635 mm,作垂直于该平面的一条直线段。在直线段与该平面交点的两侧各 32.5 mm 处(总距离 65 mm)作两个点,这两点即为驾驶员的眼点。
(4)在装配变曲率后视镜时通过将使用点阵最小二乘法拟合的后视镜镜面进行构造和装配。通过实体的移动和旋转完成与三维直角坐标的矩阵变换的等效动作。
(5)通过放样和延伸命令形成椎体与地面或屏幕相交确定驾驶视野范围 。
(6)通过眼点向变曲率后视镜做连线,确定视线的入射点,再通过入射点做后视镜曲面的法线,通过镜像命令构造反射光线。再将反射光线延长到投影屏幕中。形成视野范围上的一点。
(7)通过在后视镜轮廓线选取20样本点,按照上一步骤做法,在投影区域内形成20点,再通平面上样条曲线连接个点,完成投影区域轮廓。当样本数量逐渐增大时,投影区域内个点连线形成的面接近真实投影面积。再通过曲面工具里的平面工具和测量命令可直接获得投影面积具体数值。
(8)通过眼点与车辆挡风玻璃和侧车窗进行放样曲面操作,直接获得驾驶员视野区域。
2.4 汽车驾驶视野范围和盲区的确定
如图2、3所示,根据生成的三维数据模型,通过观察可知。车辆盲区的范围主要分布在车辆下部的裙状不规则区域和车头、车尾以及A、B柱方向上。
图2所示锥状区域为车辆尾部的间接驾驶视野范围和盲区范围,其中尾部驾驶视野盲区是指车辆轮廓后部到车辆后视野与地平面相交线之间的一片立体区域与C柱盲区连为一体。
如图3所示呈喇叭状区域为车辆头部直接视野范围。车头盲区是指前下方驾驶员视野与地平面相交的部分。车辆头部盲区为车辆前下方驾驶员视线与地面交线之间围成的区域。
可按照车辆不同的行驶状态,划分盲区的重要性。并针对该状态下的重点隐患盲区选取排除方案。
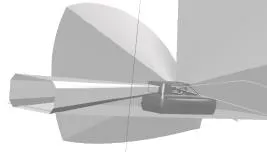
图2 车辆尾部盲区范围

图3 车辆头部盲区范围
2.5 驾驶视野的分布和测量
通过数据生成驾驶视野立体区域,并向车辆前部、侧面和车辆尾部方向上一定距离上投影,并对投影区域面积进行计算,并选取不同的角度按照不同的步长输入系统进行表投影面积的大小。获得最佳的布置角度。
使用曲面镜外后视镜驾驶视野分布。如图4、5,后视镜为曲面的前提下,在按照要求调整后视镜角度后,获得的视野区域为:左侧车辆10m处视野宽度为5290mm,大于国家标准的2500mm。右侧30m处宽度为9013.4mm大于3500mm的国家标准。通过模型的分析测量功能,可直接测量不同后视镜加装后的使用效果。
3 结论
本文的主要工作为,介绍在已有理论基础上建立三维数据模型的方法和步骤,并将经过校验的后视镜成型曲面构造到三维模型中。并验证通过三维数据模型进行测量和指导设备选取的功能。经过与以往的测试方法比较,使用仿真软件建模的方法可以直观测量不同后视镜在车身后10m、20m等投影幕上的视野范围。可以量化观测到的路面宽度的具体数值,甚至可直接得出投影幕上的视野面积。
另外,从数据模型中可以看到视野范围的三维形状,通过调整后视镜角度参数即可直接得出不同的视野范围,具有直观、方便的特点。有利于车身设计和安全分析。相对于传统的后视野测试方法具有明显的优势。
[1]赵云,唐如亚,陈华杰.后视镜布置与视野安全性分析[J].机电技术,2012,28(05):90-109.
[2]GB15084-2006,机动车辆后视镜的性能和安装要求[S].
[3]黄天泽,黄金陵.汽车车身结构与设计[M].北京:机械工业出版社,2006.
刘军(1977-),男,东北林业大学,载运工具运用工程专业,哈尔滨职业技术学院机械工程学院讲师。