双基地机载雷达杂波预滤波方法
2015-07-24冯大政朱国辉
周 延,冯大政,朱国辉
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
双基地机载雷达杂波预滤波方法
周 延,冯大政,朱国辉
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
针对双基地机载雷达空时自适应处理难以有效抑制杂波检测目标的问题,提出了一种双基地机载雷达杂波预滤波方法.该方法考虑了实际中载机速度的估计与真实速度的误差,利用雷达系统参数、载机平台速度等信息设计杂波预滤波器抑制大部分杂波,剩余的少量杂波可由发展成熟的空时自适应处理算法进行抑制,进而提高空时自适应处理算法的动目标检测能力.计算机仿真实验表明,该方法能有效地对几种典型几何配置下的双基地机载雷达杂波进行抑制,降低了杂波自由度,后续级联进一步改善了空时自适应处理算法的动目标检测性能.
双基地机载雷达;空时自适应处理;降维;杂波抑制
近年来,双基地雷达因其具有抗隐身、抗反辐射导弹、抗综合电子干扰和抗超低空突防的“四抗”优势,得到了快速发展和广泛应用[1-2].而由于双基地雷达复杂的几何配置及基地之间收发分置关系,导致了杂波回波的多普勒频率和杂波距离之间相关性的增强,即杂波回波的距离非平稳性[3-7].已经发展成熟并且已经应用于实践中的空时自适应处理(Space-Time Adaptive Processing,STAP)[8-9]是一种在空域和时域联合抑制杂波并且检测动目标的方法,很多学者已经将其应用在了双基地机载雷达中[10-12],但是由于双基地机载雷达杂波非均匀性的增强,单纯地将STAP方法应用于双基地机载雷达很难取得满意的效果.经典的降维STAP算法,如辅助通道法(Auxiliary Channel Receiver,ACR)、局域化处理方法(Joint Domain Localized,JDL)和因子法(Factored Approach,FA)等可大大降低自适应处理所需要的均匀训练样本数量,而性能与最优的STAP方法相差不多,但在实际中阵列误差不可避免,都需要增加自由度改善性能,引起训练样本增高和计算量增加的问题.
合理地利用雷达系统参数和先验知识可有效改善动目标的检测性能,笔者基于已知的雷达系统参数,提出了一种双基地机载雷达杂波抑制方法.该方法考虑了实际中载机速度的估计与真实速度的误差,利用雷达参数、载机平台速度等信息设计杂波预滤波器抑制大部分杂波,剩余的少量杂波可由发展成熟的降维空时自适应处理方法进行抑制,进而提高STAP算法的动目标检测能力.计算机仿真实验表明,该方法能有效地对几种典型几何配置下的双基地机载雷达杂波进行抑制,降低了杂波自由度,后续级联进一步改善了降维STAP算法的动目标检测性能.
1 信号模型
任意几何配置下的双基地机载雷达系统如图1所示,发射平台和接收平台的连线为双基地基线,记其长度为L.以双基地基线在地面的投影为Y轴、接收平台和地面的垂直连线为Z轴建立三维坐标系. vT和vR分别是发射平台和接收平台的载机速度,θFT和θFR是为发射和接收平台天线指向相对于基线的方位角,φT和φR是地面散射单元相对于发射和接收平台的俯仰角,δT和δR是发射和接收平台载机飞行方向相对于基线方向的方位角,hT和hR是发射和接收平台的高度,Rs为双基地探测距离和,Rs=RT+ RR,而RT和RR分别为地面杂波散射点分别到发射平台和接收平台的距离.
根据图1的几何关系,接收平台接收的地面杂波散射点反射的回波多普勒频率为[3]


图1 双基地机载雷达系统
其中,ψT和ψR是地面杂波散射点相对于接收平台和发射平台飞行指向的锥角,它与方位角和俯仰角有如下关系:

假设雷达天线为均匀线阵结构,或者是面阵经微波合成的等效线阵结构,阵元数为N,一个相干处理间隔(Coherent Processing Interval,CPI)内的脉冲数为K.记cn,k(l)为第l个距离环上第n个接收阵元接收的第k个发射脉冲返回的杂波数据[8],即

其中,Nc为一个距离单元内划分的杂波散射单元的个数,而


设N根天线的第k次的接收回波为

其中,


其中,符号diag(·)表示对角化向量,矩阵F(k)和S分别包含了一个距离环内所有方向杂波回波的多普勒和空域相位,而向量ak则包含了一个距离环内所有方向杂波回波的幅度.
2 双基地机载雷达杂波抑制方法
假设杂波回波在一个CPI内的起伏非常缓慢,即ak=ak+1,则N根天线第k+1次的接收回波为

比较F(k)和F(k+1),可知

在复杂的载机平台飞行环境中,接收平台和发射平台的载机速度估计会存在误差,因此可设计一系数矩阵D,使得相邻脉冲间的杂波数据之差的能量在速度误差范围内积分最小,即


其中,[·]H表示共轭转置,tr(·)表示矩阵的迹.令式(12)关于D的梯度为零,可求的闭式解为

对一个CPI内的回波进行杂波抑制,则有

3 预滤波降维STAP方法
节2提出的杂波抑制方法可作为杂波预滤波器使用,后续处理可以级联降维空时自适应处理方法.这里将以因子法(Factored Approach,FA)为例,说明双基地机载雷达杂波预滤波方法级联降维空时自适应处理方法的应用.
将系统在1个CPI内所有N个阵元接收的数据排成一个列向量,其表达式为

定义目标导向矢量为

其中,st为目标信号的时域导向矢量,ss为目标信号的空域导向矢量.杂波预滤波器可以写成一个预滤波矩阵的形式,定义杂波预滤波矩阵为

其中,IN∈CN×N,为单位矩阵.经过预滤波后的数据矢量和导向矢量可表示为

需要注意的是,经过预滤波后的信号由原来的NK维变为了N(K-1)维,即经过预滤波后的数据在脉冲维上减少了一维,这是因为其中有一个脉冲用于杂波对消.假设fk为待检测通道多普勒频率,则多普勒滤波器向量fk=[1,exp(j2πfk),…,exp(j2π(K-2)fk)]T,降维矩阵TFA=fk⊗IN.对预滤波后的数据和导向矢量进行降维处理,得到

得到预滤波后因子法的权矢量为

4 仿真实验
进行以下的仿真实验来验证文中算法的性能.实验中采用8×8的平面阵.一个相干处理间隔内的脉冲数K=16,发射脉冲重复频率fr=2 000 Hz.发射载机和接收载机高度均为hT=hR=1 km,飞行速度均为90 m/s,阵元间距d=0.1 m,发射波长λ=0.2 m.沿着方位角将一个距离单元等间隔地划分为300个杂波散射单元.杂噪比(CNR)为60dB.动目标的多普勒频率fdt=0.1fr,信噪比(SNR)为10dB,杂波相对带宽Br=0.01.分别仿真了δT=0°,δR=0°和δT=90°,δR=-90°两种典型双基地几何配置情况下杂波对消前后的功率谱(空时二维Capon谱).
由于实际中不能准确知道载机的飞行速度,可假设估计的接收和发射的载机平台运动速度误差为5 m/s,即载机平台运动速度在85~95 m/s之间.图2(a)和图2(b)为δT=0°,δR=0°的双基地几何配置下使用预滤波器抑制杂波前后的空时二维杂波功率的变化.从图2(a)可以看出,在角度-多普勒平面上空时二维杂波功率沿一条曲线分布,主杂波区功率高出非杂波区约50 d B,高出信号功率约20dB.图2(b)表明经过空时两维杂波预滤波后,大部分的杂波能量被滤除,而目标信号的信噪比仍为10dB.经过预滤波后,目标能量比杂波主瓣区能量高出约10dB.这说明在δT=0°,δR=0°的双基地几何配置下,文中所提的杂波抑制方法能够有效地沿杂波迹形成凹口对杂波进行滤除,而对目标信号没有影响,这为后续的动目标信号的相干积累和检测提供了方便.图3和图4给出了偏航角δT=90°,δR=-90°和δT=60°,δR=-60°的双基地几何配置下,使用预滤波器抑制杂波前后的空时二维杂波功率的变化.从图3(a)可以看出,在角度-多普勒平面上,这种情况下的空时二维杂波功率呈一个封闭的“8”字曲线,而图4中的空时二维杂波功率呈一个不规则的鸡蛋形状曲线,主杂波区功率高出非杂波区约50 d B.图3(b)和图4(b)均表明,经过预滤波后,杂波能量得到了抑制,而目标信号几乎不受影响.

图2 预滤波处理前后杂波功率谱的空时二维分布(δT=0°,δR=0°)
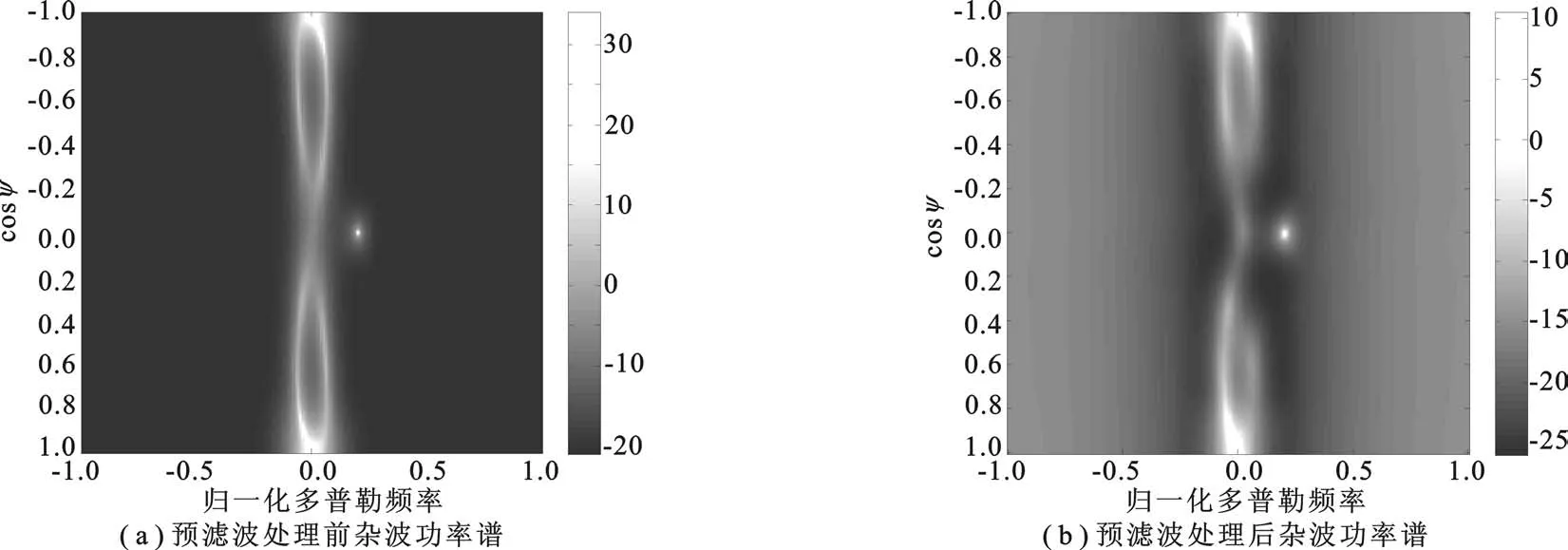
图3 预滤波处理前后杂波功率谱的空时二维分布(δT=90°,δR=-90°)
图4 预滤波处理前后杂波功率谱的空时二维分布(δT=60°,δR=-60°)
图5给出了预滤波前后杂波协方差矩阵的特征值分布图,选取预滤波前和预滤波后的前100个大特征值比较.由图5可见,经过预滤波处理后,杂波协方差矩阵的大特征值由35降低到了20.杂波自由度的显著降低将很有利于后续空时算法性能的提高.
图6比较了因子法和扩展因子法(Extend Factored Approach,EFA)以及预滤波后级联因子法和扩展因子法的改善因子曲线.预滤波+FA和预滤波+EFA分别表示预滤波后级联因子法和扩展因子法.从图6可以看出,经过杂波预滤波后,两种算法的性能都不同程度地好于预滤波之前的.在图6(a)的归一化多普勒频率fd=0 Hz的主杂波区中,因子法和扩展因子法在级联杂波预滤波器后分别有11.5 d B和0.8dB的改善;而在fd=0.5 Hz的旁瓣杂波区,它们在级联杂波预滤波器后分别有5.2 d B和1.1dB的改善.而在δT=90°,δR=-90°的双基地几何配置下,预滤波之后的FA和EFA算法的改善因子在主杂波区的凹陷更深,它们在非主杂波区的改善因子较原方法也有一定的提升.在这两种方法中,因子法改善因子的提高尤为明显,而扩展因子法改善因子的提高不是很明显,这是因为在均匀样本充足的情况下,扩展因子法已基本接近最优.此外这两种方法在主杂波区的改善将有利于低速目标的检测.

图5 预滤波处理前后杂波协方差矩阵的特征值分布(δT=0°,δR=0°)
5 结束语
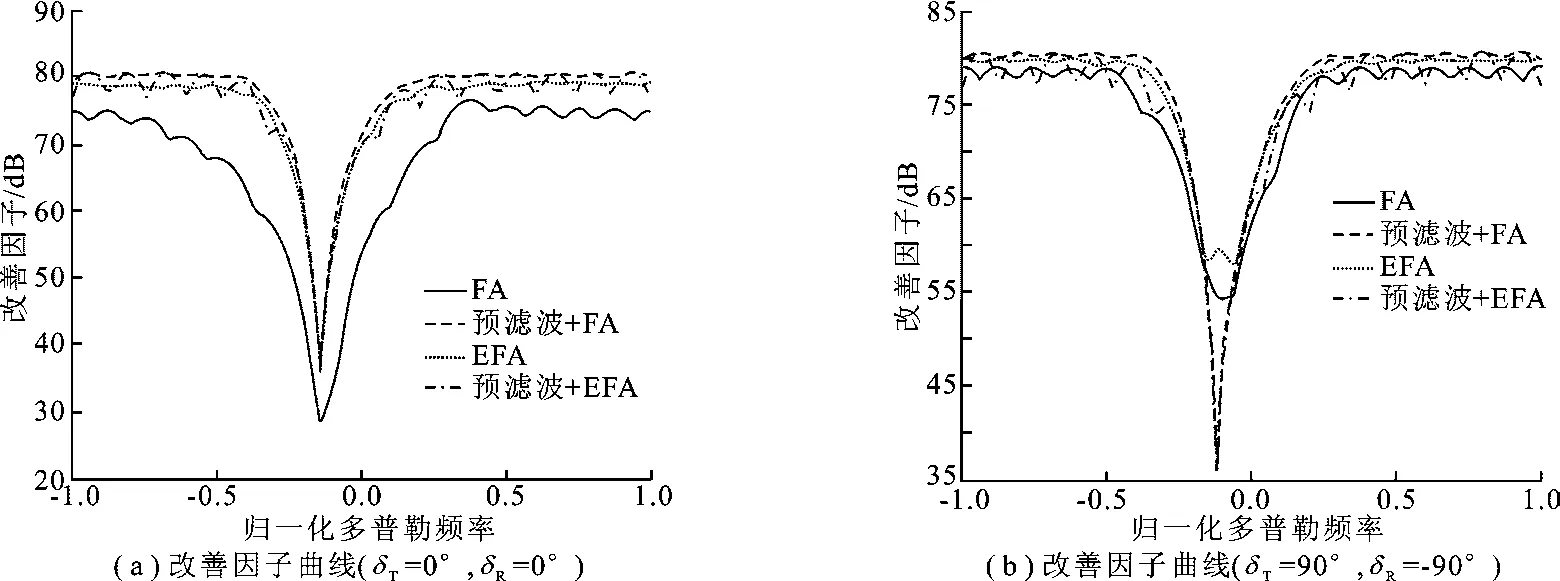
图6 预滤波前后的STAP算法改善因子曲线
提出了一种能大幅降低杂波自由度的双基地机载雷达杂波抑制方法,该方法考虑到了实际中载机平台的速度误差,利用双基地机载雷达的几何配置信息及雷达工作参数,设计滤波器系数矩阵以对消杂波,具有无收敛过程应用范围广等优点.通过理论分析和实验仿真证明,笔者所提的算法在两种典型双基地几何配置情况下都能很好地抑制杂波,这减轻了后续降维自适应处理的负担,为提高动目标检测性能奠定了良好的基础.
[1]陈士超,张磊,李健,等.一种聚束式同轨双基地SAR的FS[J].西安电子科技大学学报,2013,40(3):20-26. Chen Shichao,Zhang Lei,Li Jian,et al.Deramp Based Frequency Scaling Algorithm Suitable for Tandem Bistatic SAR in the Spotlight Mode[J].Journal of Xidian University,2013,40(3):20-26.
[2]沈方芳,李雅祥,赵光辉,等.双基地MIMO雷达高分辨角估计[J].西安电子科技大学学报,2013,40(5):40-48. Shen Fangfang,Li Yaxiang,Zhao Guanghui,et al.High Resolution Angle Estimation of Bistatic MIMO Radar[J]. Journal of Xidian University,2013,40(5):40-48.
[3]Xie W C,Zhang B H,Wang Y L,et al.Range Ambiguity Clutter Suppression for Bistatic STAP Radar[J].EURASIP Journal on Advances in Signal Processing,2013,2013(1):1-13.
[4]Klemm R.Comparison between Monostatic and Bistatic Antenna Configuration for STAP[J].IEEE Transactions on Aerospace and Electronic Systems,2000,36(2):596-608.
[5]杨博,周一宇,黄知涛.距离模糊条件下的双基地STAP的距离独立性补偿[J].电子学报,2011,39(3):555-561. Yang Bo,Zhou Yiyu,Huang Zhitao.Range Dependence Compensation for Bistatic STAP Based on Range Ambiguity [J].Acta Electronica Sinica,2011,39(3):555-561.
[6]Kreyenkamp O,Klemm R.Doppler Compensation in Forward-looking STAP Radar[J].IEE Proceedings:Radar,Sonar and Navigation,2001,148:253-258.
[7]Himed B,Zhang Y,Hajjari A.STAP with Angle-Doppler Compensation for Bistatic Airborne Radar[C]//Proceedingsof IEEE National Radar Conference.Piscataway:IEEE,2002:311-317.
[8]Klemm R.Space-time Adaptive Processing-principles and Applications[M].London:IEEE Publishers,1998:101-104.
[9]Zheng Y R,Shao T,Blasch E.A Fast-converging Space-time Adaptive Processing Algorithm for Non-Gaussian Clutter Suppression[J].Digital Signal Processing,2012,6(3):130-136.
[10]吕晖,冯大政,和洁,等.机载多输入多输出雷达局域化降维杂波抑制方法[J].西安电子科技大学学报,2011,38(2): 88-92. LüHui,Feng Dazheng,He Jie,et al.Localized Reduced-dimension Clutter Suppression Method for Airborne MIMO Radar[J].Journal of Xidian University,2011,38(2):88-92.
[11]吕维,王志杰,李建辰,等.空时耦合项对空时自适应处理的影响[J].西安电子科技大学学报,2012,39(2):207-212. LüWei,Wang Zhijie,Li Jianchen,et al.Influence of the Space-time Coupling Term on STAP[J].Journal of Xidian University,2012,39(2):207-212.
[12]魏进武,王永良,陈建文.双基地机载预警雷达空时自适应处理方法[J].电子学报,2001,29(12):1936-1939. Wei Jinwu,Wang Yongliang,Chen Jianwen.Space-time Adaptive Processing Approaches to Bistatic Airborne Early Warning Radar[J].Acta Electonica Sinica,2001,29(12):1936-1939.
(编辑:齐淑娟)
Clutter pre-filtered method applied in bistatic airborne radar
ZHOU Yan,FENG Dazheng,ZHU Guohui
(National Key Lab.of Radar Signal Processing,Xidian Univ.,Xi’an 710071,China)
In order to solving the problem of ineffective clutter suppression and target detection of spacetime adaptive processing(STAP)in bistatic airborne radar,a clutter pre-filtering method applied in the bistatic airborne radar that takes advantage of radar operating parameters,platform velocity and so on is proposed.The velocity error of the airborne platform is also considered.Most of the clutter can be filtered so that the residual clutter can be completely suppressed by the well-developed STAP algorithm.Computer simulation results show that this method is effectively workable to several classical geometric configurations of bistatic airborne radar.The moving target detectability of the following STAP algorithm is also enhanced after this pre-filter.
bistatic airborne radar;space-time adaptive processing(STAP);dimension-reduced;clutter suppression
TN957.51
A
1001-2400(2015)05-0068-07
2014-05-20< class="emphasis_bold">网络出版时间:
时间:2014-12-23
国家自然科学基金资助项目(61271293)
周 延(1988-),男,西安电子科技大学博士研究生,E-mail:yanzhou@stu.xidian.edu.cn.
http://www.cnki.net/kcms/detail/61.1076.TN.20141223.0946.012.html
10.3969/j.issn.1001-2400.2015.05.012
