试析网络视频监控中运动目标跟踪方法改进
2015-07-18李德文广东南方电信规划咨询设计院有限公司惠州分公司广东惠州516000
李德文(广东南方电信规划咨询设计院有限公司惠州分公司,广东 惠州 516000)
试析网络视频监控中运动目标跟踪方法改进
李德文
(广东南方电信规划咨询设计院有限公司惠州分公司,广东惠州516000)
本文简单的介绍了网络视屏监控的系统框架,并进一步的研究和探讨了MeanShift目标跟踪算法及其改进方法,希望能够有效的促进我国网络视频监控目标跟踪的实时性和有效性。
网络视频监控;运动目标跟踪;算法改进;MeanShift算法
网络视频监控主要使用的是智能处理技术对监控领域进行监控的一项关键技术,网络视频监控技术会将视频中的各个帧图像中确定运用目标的位置,同时会分配一致的ID号,进而确定跟踪目标的运动轨迹,因此网络视频监控是各种后续应用的基础,例如:目标行为、目标分类等等。MeanShift算法是网络视频监控中运动目标跟踪的一种主要算法,该项算法具有收敛速度快、计算量小的优点,因此在网络视频监控的运动目标跟踪中得到了广泛的应用,但是研究表明MeanShift算法也存在着一系列的问题,需要进行深入的研究与改进,例如:当运动物体被事物遮挡,或者是运动物体在运动区域进行相互重叠等等情况就很容易造成运动目标跟踪的丢失,因此本文主要针对MeanShift算法中存在的不足对网络视频监控中运动目标的跟踪进行了改进。
一、网络视频监控发展进程
网络视频在我国主要经历了三个发展阶段:
1 发展初期,由安防产品转变而来的第一代模拟的视频监控系统——闭路视频监控系统,是我国最早的视频监控系统。
2 发展中期,在20世纪的90年代,基于pc机插卡式的视频监控系统逐渐的进入人们的生活,虽然这种监控系统已经初步的实现了数字化,但是由于我国当时在远程传输的监控、图像的质量以及稳定性方面还存在着诸多问题,因此第二代的视频监控系统也仅仅只能扮演着安防产品的角色应用与部分特点的行业之中。
3 20世纪90年代末至今,随着我国计算机信息以及网络、通信技术的不断发展和各种视频监控技术的不断完善,以智能图像分析为特点的网络视频监控技术逐渐的在各行各业中得到了广泛的应用。
二、网络视频监控的系统框架
网络视频监控系统主要由网络摄像机和智能分析服务器两个部分组成,其具体的网络视频监控处理流程图如图一所示,网络摄像机的主要功能是对监控区域进行数据的采集以及对采集的录像进行压缩编制,然后再将采集的视频数据通过RTP的方式进行发包,传送给后台的智能分析服务器。而智能分析服务器主要是接收网络摄像机采集的视频数据,并对接收到的RTP数据进行帧解码,最后再通过智能分析技术对监控视频中的运动目标进行分析和处理。因为网络视频监控系统的数据采集和视频的分析都是实时进行的,因此对智能分析以及视频解码的正确性提出了较高的要求,并且智能分析服务器的处理速度一定要满足实时处理的需要。
运动目标的跟踪以及运动目标的检测等等都是属于智能分析技术的范畴,智能分析技术的目标跟踪的处理流程如图2所示,从图2中我们可以清楚的看到每一帧视频监控首先都必须经过前背景检测模块对前像进行提取,让后经过新团块检测模块对需要检测的目标监理跟踪对象,然后再进入团块跟踪模块对跟踪目标在前帧的位置进行确定,最后进入轨迹分析模块对跟踪目标的运动轨迹进行分析。
三、MeanShift目标跟踪算法以及改进方案
团块跟踪模块是目标跟踪技术的核心部分,而MeanShift跟踪算法是应用最为广泛的一种目标跟踪算法,因为网络视频监控技术对视频监控的准确性和实时性提出了较高的要求,因此本文主要研究和探讨了MeanShift算法的改进方法。
1 MeanShift跟踪算法。MeanShift算法对运动目标进行跟踪时,首先使用的使颜色直方图对运动目标进行表示。在某一帧内,候选目标的初选位置均是上一帧的目标位置,并且使用的是Bhattacharyya系数对目标和候选目标的相似度进行计算,同时在目标的附近用MeanShift算法进行迭代搜索,进一步的寻找相似度较大的候选目标。虽然MeanShift算法具有收敛速度快和计算量小的优点,但是利用该方法对跟踪领域的目标进行跟踪时,算法容易受到遮挡的影响。
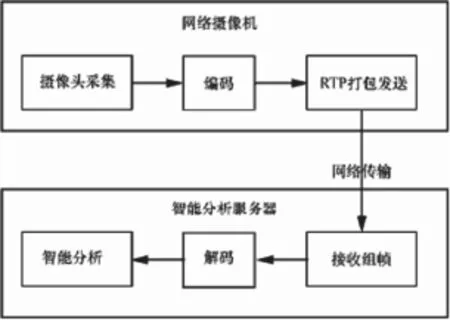
图1 网络视频监控处理流程图

图2 目标跟踪处理流程图

图3 多个物体运动遮挡的算法比较
2 改进的基于Kalman滤波的Mean Shift跟踪算法。针对MeanShift跟踪算法中存在的问题,在Kalman的滤波状态中引入加速度项,能够更准确的对 运动目标在当前帧的速度和位置进行预测,因此能够大幅度的掌握运动目标突然转变的情况。(1)算法设计。基于Kalman滤波的Mean Shift算法主要可以分为三个步骤:①由于Kalman滤波的运动位置是根据上一帧的运动状态对当前视频帧的运动位置进行预测,并且将该位置作为MeanShift算法的初始搜索点。②通过进行几次MeanShift迭代,便能够有效的得出当前视频帧的最优估测位置。③以运动目标的最优估测位置作为MeanShift的观测值,并将该值带入到Kalman的更新阶段,用于更新与其相关的参数。(2)实验结果分析。通过对传统的MeanShift算法与基于Kalman滤波的Mean Shift算法进行比较,得到图3,从图3中我们可以清楚的发现,利用传统的Mean Shift进行运动目标的跟踪,图3(a)、(b)在两个物体相遇后都出现了跟踪丢失,而基于Kalman滤波的MeanShift算法并没有因为两个物体的相遇而受到遮挡的影响,如图3(c)、(d)所示。
结语
综上所述,通过对网络视频监控系统中的运动目标跟踪技术的研究与分析,我们发现了MeanShift算法中存在的不足,为了有效的解决MeanShift算法中存在的不足,本文在Kalman滤波的基础上研究了MeanShift算法因为遮掩跟踪丢失的问题,对传统的MeanShift算法进行了改进,在一定的程度上有效的提高了网络视频监控的效率与准确性,并且通过实验证明改进后的MeanShift算法具有实时性好、简单方便的特性,可以在网络视频监控中进行广泛的使用。
[1]李劲菊,朱青,王耀南,等.一种复杂背景下运动目标检测与跟踪方法[J].仪器仪表学报,2010,31(10) .
[2]徐杨.基于视频序列的运动目标检测和跟踪算法研究[D].合肥工业大学,2010.
[3]焦波.面向智能视频监控的运动目标检测与跟踪方法研究[D].国防科学技术大学,2009.
[4]张文杰,戚飞虎,江卓军,等.实时视频监控系统中运动目标检测和跟踪的一种实用方法[J].上海交通大学学报,2002,36(12).
[5]党晓军.复杂场景下运动目标实时跟踪技术的研究与系统实现[D].国防科学技术大学,2008.
[6]盛平,倪冬玮,张净,等.动态目标跟踪与自动特写快照系统的设计及实现[J].东南大学学报(自然科学版),2011,41(05).
TP391
A
