一种基于概率密度的WLAN 接入点定位的算法
2015-07-12杨小玲
陈 兵 杨小玲
(南京航空航天大学计算机科学与技术学院 南京 210016)
一种基于概率密度的WLAN 接入点定位的算法
陈 兵 杨小玲*
(南京航空航天大学计算机科学与技术学院 南京 210016)
无线局域网(WLAN)中可以对无线接入点(Access Point, AP)进行定位。该文提出一种基于概率密度的AP定位算法(Probability Density algorithm for Access Point Localization, PDAPL)。首先对实验区域进行分区;然后根据定向天线在不同位置和不同角度收到的信号强度,计算AP落在各区域的概率,形成与密度有关的概率统计表;最后对AP的位置进行评估。实验结果表明,该文提出的算法采集数据少,只需在少量点和少量角度采集信号就可以得到较高的定位精度。与DrivebyLoc, Distance和AoA相比,得到相同的定位精度PDAPL所需要的测量点和测量角度只是DrivebyLoc的一半左右,比Distance和AoA所需要的更少;测量点和测量角度数量相同时,PDAPL的定位精度相对于DrivebyLoc提升了50%左右。
无线通信;接入点(AP)定位;定向天线;概率密度
1 引言
随着无线通信技术的发展,无线定位服务越来越重要,但由于全球定位系统在高楼林立的城市街区或建筑物内不能精准工作,于是又出现了一系列地面无线定位系统[1],例如基于红外线、超声波、蓝牙、无线传感器网络、无线局域网(Wireless Local Area Network, WLAN)等定位技术,其中基于WLAN的定位技术成为研究热点,其具有设备简单、覆盖范围广、服务可集成高等特点。WLAN有两种主要的拓扑结构,即自组织网络和基础结构网络,其中基础结构网络目前应用最为广泛,在此结构中,无线局域网的接入点(Access Point, AP)负责无线网络的覆盖和通信,是无线局域网的中心。本文主要研究无线接入点的定位问题,其意义在于随着WLAN的高密度发展,协调和管理无线网络成为一个很重要的问题,因此需要能够通过他们的信号来确定其位置。对单独的用户来说,AP定位可以帮助他们得到无线接入点的位置信息,进而快速地连接网络;对网络管理员而言,AP定位有助于更好的网络管理,识别额外接口的AP,帮助找到非法AP,尤其在一些涉密单位,可以通过AP定位来发现和定位无线接入点。
根据定位依据的物理量,无线定位可以划分为几下几类:基于信号到达时间(Time Of Arrive, TOA)[2]、基于信号到达时间差(Time Difference OfArrive, TDOA)[3]、基于信号入射角(Angle Of Arrive, AOA)[4]、基于接收信号强度(Receive Signal Strength, RSS)[5]。现有AP定位的方法可分为以下几类:(1)基于信号传播模型,例如文献[6-11]。在一个或多个点进行测量,得到一组RSS,利用无线信号传播模型将信号强度转化为测量点与AP的距离,进而计算AP的位置;(2)基于信号强度的梯度值,例如文献[12]。在多点进行测量,比较收到的信号强度值,分析RSS的变化趋势,进而估算AP的位置;(3)基于AP之间的相对位置,例如文献[13,14]。在需要定位的区域内加入一些已知位置的AP,根据多点测量得到的信号强度,找出已知位置的AP和待定位AP的几何关系,再通过已知位置的AP计算待定位AP的位置;(4)利用定向天线或其他类似设备,例如文献[15-17]。根据天线旋转过程中的信号强度变化,判断AP的方向,通过多点测量,得到各测量点上可能的AP的方向,然后综合这些方向计算AP的位置。
以上方法的共同特点是,为了提高定位精度,需要在很多点和很多角度收集数据,费时费力。据此本文提出了一种仅需在少量采集点收集少量数据就可以获得较高精度的AP定位的方法,利用定向天线各角度增益不同的特点,根据其在不同位置和不同角度上收到的信号强度,使用一种基于概率密度的定位算法,对AP的位置进行估计。与已有算法相比,本文算法具有采集数据少而定位精度高的优点。
2 基于概率密度的定位算法
2.1 基本思想
传统利用定向天线进行AP定位时,在各测量点上将定向天线旋转一周,记录并比较各角度的信号强度,然后取某一个角度(一般是信号强度最强的角度)作为AP的方向。这样做能够在当前测量点获得待定位AP的方向,但在复杂环境中,由于反射、衍射等多种因素,使得情况变得复杂。文献[16]分析了使用信号强度最大的角度作为AP的方向时,所得的角度误差受环境的影响程度:当在比较简单的环境中,例如操场上,在各测量点上得到的方向大多指向AP的真实位置,平均角度误差较小;但在复杂环境中,例如办公环境,在各测量点上得到的方向比较杂乱无章,平均角度误差达到55°,因此仅以信号强度最大的角度作为AP的方向来估计AP的位置不是很精确。在此基础上,文献[16]中提出了一种方法来估计AP的位置,将在所有测量点上得到的AP的方向使用k-means方法进行分类,得到AP的多个位置镜像,再使用启发式算法从中找出AP的实际位置,但这种方法只选取信号强度最大的角度,忽略了测量过程中得到的其它信息,使得需要在很多点收集很多数据才能达到较好的定位精度。对此,本文认为定向天线在旋转过程中得到的各角度的信号强度不宜轻易丢弃,虽然在这些角度上的信号强度不是最大的,但仍可利用这些值对AP的位置进行估计,而不仅仅只是被用来相互比较之后就丢弃不用,本文正是基于这样的思想,提出了一个基于概率密度的AP定位的算法(Probability Density algorithm for Access Point Localization, PDAPL)。
该算法的基本思想是:对整个实验区域进行分区,并建立一张对应的概率密度表,表中每个位置的值表示AP在相应单元格的可能性。当在某个测量点的某个角度检测到待定位AP时,根据信号强度计算AP落在各单元格的可能性,并累加到概率密度表中。经过少量点少量角度的数据收集和计算,最终选择某点作为AP的位置。
2.2 理论基础
大量研究表明,在仅考虑地面反射波的情况下,无线信号遵循对数距离路径损耗模型[18],即

其中Pr表示与发射源距离为d处接收到的信号强度,以dBm为单位;P0表示与发射源距离为d0处接收到的信号强度;Gt表示发射天线的增益;Gr表示接收天线的增益;n是路径损耗指数,表明损耗随距离增长的速率,与周围环境有关;Xg表示一个高斯分布的随机变量。
2.3 算法流程
2.3.1 概率计算流程 假设定向天线在第i个测量点(位置记为(xi,yi))的第j个角度(即天线的方向,记为θj)检测到待定位AP时(其信号强度值记为RSSij),计算AP落在单元格k(位置记为(xk,yk))的概率,过程如下:
(1)计算单元格到测量点的距离Dk和单元格相对于测量点的角度βk,其中

(2)根据天线的方向θj和单元格相对于测量点的角度βk,计算出单元格相对于天线的角度Δk(0o≤Δk<360o),其计算公式为

根据天线的辐射方向图得到天线相对于单元格的增益Gk;
(3)根据Dk和Gk,利用式(1)可以求出若AP在当前单元格,在当前测量点能够收到的理论信号强度值Tk,并根据式(4)将Tk转化为能够测量到的理论值DTk:
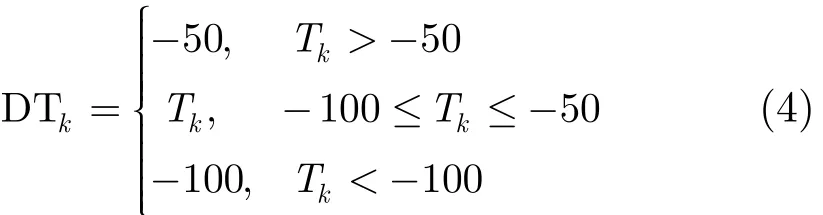
(4)计算AP落在单元格的概率。由于式(1)只考虑直射距离对信号强度的影响,而在实际的环境中,AP安装在房间内,室外的测量点收到的信号由于经过了墙壁、树木及其它建筑物的反射、绕射等多种因素的干扰,计算出来的理论值应大于实际测量到的信号强度,因此如果在某个单元格计算出来的信号强度的理论值小于实际测量值时,说明AP落在该单元格的可能性很小,这时将Pm(一个相对比较大的数)作为其概率值;否则将其差值作为该单元格的概率值。

2.3.2 PDAPL算法流程
(1)初始化 将整个实验区域进行分区,每个单元格的大小设置为CS×CS, CS的单位是m,实验区域总共划分为A×B个单元格;建立一个A×B的概率密度表Pr,表中的值表示AP落在相应单元格的可能性,值越小,表示AP落在相应单元格的可能性越大。初始化表中所有的值为0;
(2)预处理 将在各测量点和各角度收集到的信号强度进行处理,得到与待定位AP有关的记录集,记为

其中,N表示测量点的个数;Mi表示在当前测量点测量的角度的个数;Loci表示测量点的位置,其坐标用(xi,yi)表示,单位为m; θj表示定向天线的角度,从正北方向顺时针旋转的角度,0≤θj<360; RSSij表示在当前测量点的当前角度收集的信号强度值。
(3)更新概率密度表 对上述的每条记录,对所有的单元格,分别调用2.3.1的过程计算概率值。假如根据某条记录计算单元格k的概率值为DIk,按照式(6)更新概率密度表为

(4)计算AP的位置 当对所有的记录都完成上述过程后,会得到表示最终结果的矩阵,每个元素标记相应单元格的概率值,值越小,表示AP落在相应单元格的可能性越大。为了避免某点的值偏小但周围的值都很大的情况,在这个矩阵中,取一个大小为Ar×Ar的小区域(Ar的单位是1,表示含有多少个单元格),其平均值最小,将这个区域作为AP最有可能存在的区域,取其中点作为AP的位置。
2.4 算法分析
假设在某测量点的某个角度检测到待定位AP,其信号强度记为RSSI,如图1(a) 所示,三角形表示测量点的位置,黑色圆点表示两个要计算概率值的单元格Cell1和Cell2的中心点,分别用d1和d2表示测量点与两个单元格的距离,且d1≪d2,且假定待定位AP的真实位置在Cell1中。根据式(5)分别计算两个单元格的概率值:对于Cell1,若AP落在其中,在该测量点的这个角度接收到信号强度的理论值记为DT1,由于理论值的计算只考虑直射距离对信号强度的影响,所以DT1≥RSSI,则DI1<50;对于Cell2,若AP落在其中,在该测量点的这个角度接收到信号强度的理论值记为DT2,由于d1≪d2,那么可能DT2<RSSI,则DI2=50。如此计算所有单元格的概率值,会得到一个区域。区域内的单元格其概率值较小,区域外的单元格其概率值较大,当然该区域的形状可能是不规则的,但一定包含AP的真实位置所在的单元格,在图中用以测量点为中心的圆大致表示该区域。
当在某个测量点的多个角度进行测量后,会使得该区域逐渐缩小。当计算多个测量点后,该区域会缩小直至AP的真实位置,如图1(b) 所示,黑色圆点表示AP的真实位置,三角形表示测量点的位置,当测量一个测量点的多个角度后,经过概率值的累加会使得该区域逐渐缩小,当计算多个测量点后,该区域会缩小至AP的真实位置。
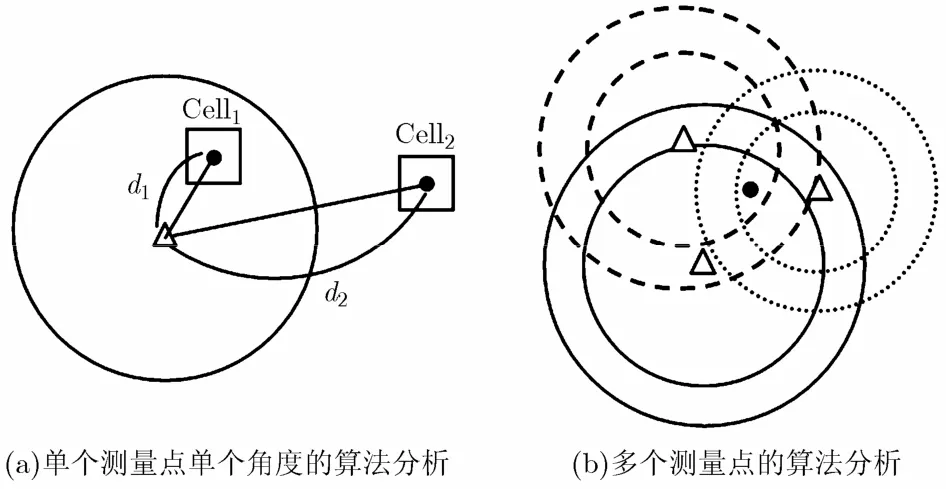
图1 算法分析
3 测试
3.1 数据获取
为了能够自动获取信息并减少各设备之间的误差,本文设计了一个基于Arduino1)) www.arduino.cc的智能小车,上面装载GPS模块和电子罗盘模块,GPS模块用来获得当前的坐标,电子罗盘模块用来获得当前天线的方向,使用两种定向天线来观察其对定位的影响,其中定向天线的辐射方向图通过实验获得,在空旷的场地上,获得定向天线各个角度的信号强度,并与全向天线的信号强度对比,得到各方向的增益,进而得到定向天线的辐射方向图。由于从辐射方向图中读到的天线增益会存在误差,因此通过电子罗盘得到的天线的角度通过四舍五入精确到十位。信号强度通过调用Microsoft Native WiFi API获取,由于单次测量可能存在误差,所以对每次测量进行多次,取其平均值作为测量结果以减少测量误差,实验中每次测量20次。
3.2 实验环境介绍
选取学校办公楼作为实验环境,其周围有树木及其它建筑物,环境比较复杂,AP安装在内部的房间,主要选取一楼和二楼的AP作为待定位AP。本文提出的AP定位算法主要分为两个阶段:离线数据收集阶段和AP定位阶段。在离线数据收集阶段中,如果在某测量点检测到待定位的AP,则该测量点对该AP的定位有影响,否则该测量点对该AP的定位可视为无效。由于在收集数据时无法得知任何关于AP位置的信息,并且对于不同的待定位AP,对其定位有影响的测量点的位置是不同的,所以测量点只能根据环境随机选取。在实验中待定位AP都在办公楼内部的房间里,所以测量点的位置大多在办公楼附近的道路上。实验环境的各参数选取如表1所示。
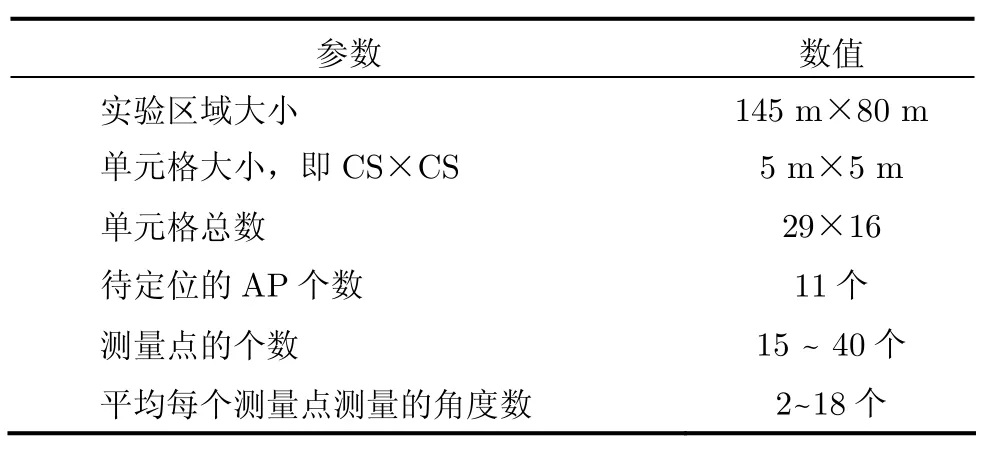
表1 与实验环境有关的参数选取
办公楼的周围环境如图2(a)所示,黑色虚线框内的是实验所用的办公楼。测量点及各AP的位置如图2(b)所示,圆圈表示待定位AP及其真实位置,白色五角星表示部分测量点的位置。

图2 实验环境介绍
3.3 参数选取
本文假设待定位AP的发射天线都是全~向天线,因此式(1)中Gt取0;路径损耗n一般取26之间,文献[8]中对校园环境做了相关实验,根据其中的α1,α2,αE的参数,本文将n取值为3;对于Pm,由于调用API获得的信号强度在-50~-100 dBm之间,因此将其取值为最大的差值,即50。
3.4 结果分析
下面是根据实测得到的部分待定位AP的概率密度分布图,颜色越深,表示其值越小,AP在相应位置的可能性越大。图中黑色实线框标记的区域表示颜色最深的区域,白色箭头指向的位置表示AP的实际位置。
由图3~图8可以看出,颜色较深的区域大概集中在某个区域内,说明估计的AP的位置大概在一个范围内,并且根据白色箭头和黑色实线框的相对位置可以看出,实际的AP大概也都在这个范围内。使用本文算法对11个AP的定位结果如图9所示,图中横轴是AP的序号,纵轴是误差距离,表示估计位置与真实位置之间的距离,值越小,定位性能越好。从图中可以看出,误差距离最大是32 m,最小是5 m,平均值大概是20 m,说明使用PDAPL进行AP定位,能直接定位到房间内。
下面讨论各参数和不同设备对定位的影响,并与其它算法进行对比。
(1)自身参数对定位的影响 本文算法涉及的参数包括:P0和Ar(Areasize),其中P0对定位的影响在于:由于测量的信号强度在-50~-100 dBm之间,若P0取值过大或过小,会导致在很多单元格计算出来的理论值大于-50 dBm或小于-100 dBm,算法会将其进行量化,这时很多单元格的概率值会相差很小甚至相同,最终导致平均误差距离变大。因此本文考虑将P0分别取值为-30, -40, -50, -60, -70, Ar分别取值为1, 2, 3, 4, 5,考虑其对定位的影响,结果如图10所示。图中5条曲线表示P0取不同值时,Ar对平均误差距离的影响。根据这5条曲线对应的平均误差距离的大小,可以看出,当P0取-40时,平均误差距离最小;并且,5条曲线都起伏不大,趋向于水平,说明Ar的取值对定位无太大影响,简单起见,将其取值为1。后面涉及这两个参数时默认都是P0取-40, Ar取1。
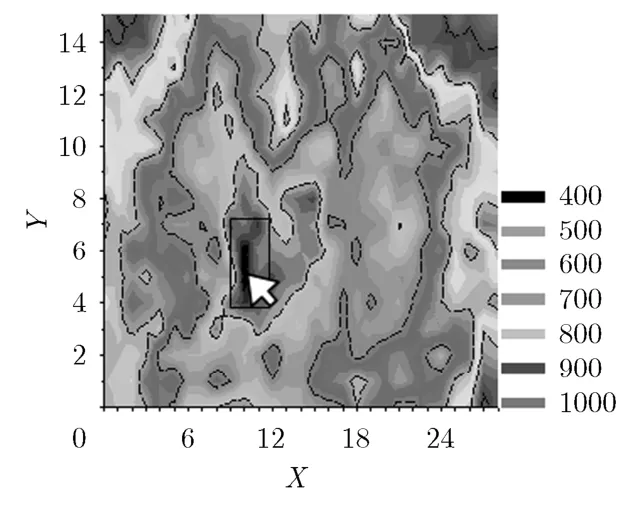
图3 AP1的概率密度分布图
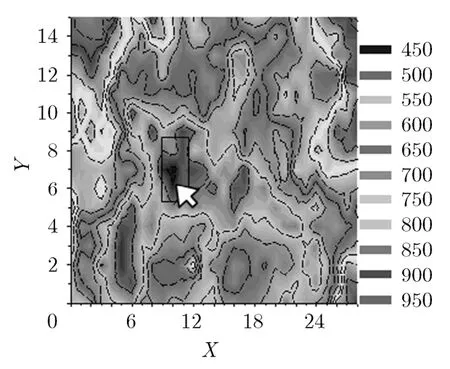
图4 AP2的概率密度分布图
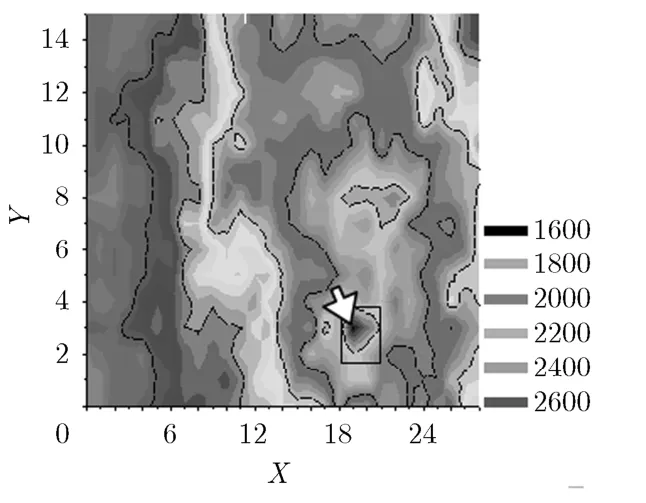
图5 AP3的概率密度分布图

图6 AP4的概率密度分布图
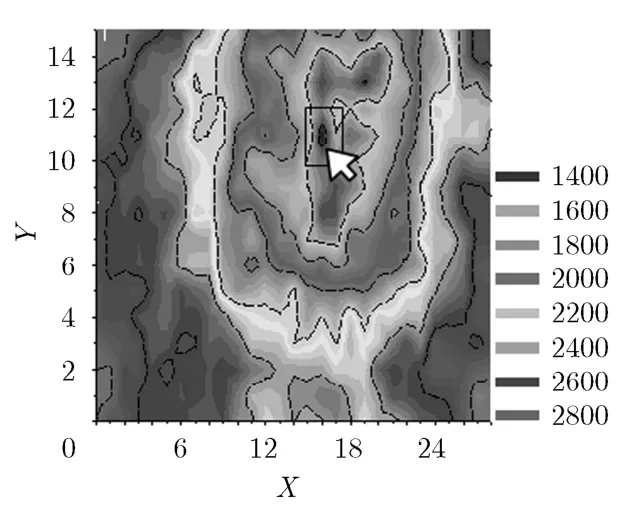
图7 AP5的概率密度分布图
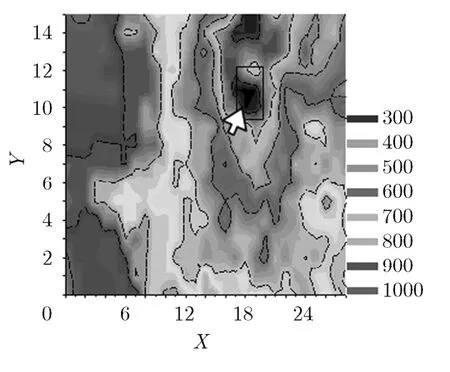
图8 AP6的概率密度分布图
(2)不同设备对定位的影响 为了探究不同增益的定向天线对定位是否有影响,本文选取两种定向天线进行实验,分别是14 dBi的平板天线和18 dBi的双极化定向天线,将两种定向天线放置在相同位置接收同一个AP的信号,得到辐射方向图如图11(a), 11(b)所示,可以看出这两种天线的增益不一样。图11(c)为使用两种定向天线进行AP定位的误差距离的累积分布函数(Cumulative Distribution Function, CDF),可以看出这两条曲线大致重合,说明使用不同增益的定向天线对定位的影响不大,这是因为本文提出的方法,在计算AP落在单元格的概率时,考虑的是信号强度的理论值与实际值之间的差值,其主要受环境影响,与定向天线的增益大小无关。后文实验中只选取一个定位天线。
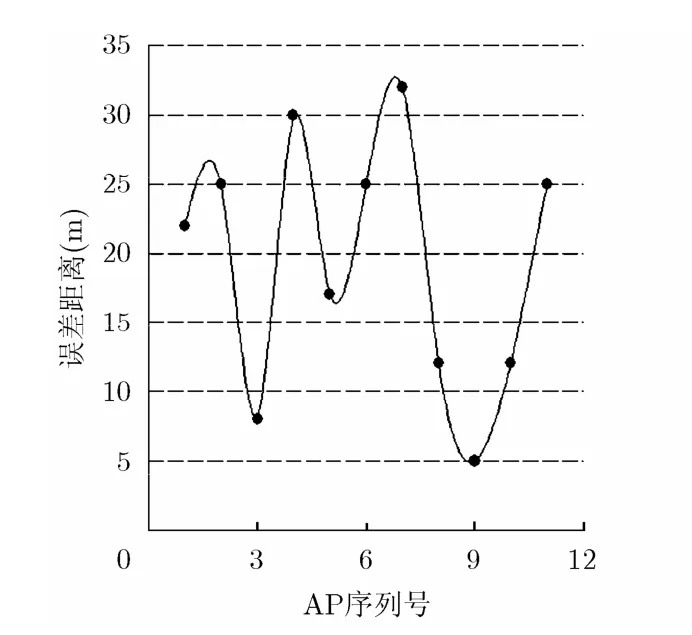
图9 使用PDAPL得到的AP误差距离
(3)与其他算法进行对比 为了评估算法的性能,使用的对比算法有:①DrivebyLoc[16],将信号强度最强的角度作为AP的方向,记录各测量点的AP的方向,利用k-means算法和启发式算法估计AP的位置;②Distance[9],取信号强度最大的值及相应角度,利用信号传播模型将RSS转化为距离,根据测量点的位置和角度求出AP的位置;③AoA,根据两个测量点估计的AP的方向估计AP的位置。

图10 P0和Ar对平均误差距离的影响

图11 两种定向天线的辐射方向图及对定位的影响
实验中,在离线数据收集阶段会在很多测量点上收集数据,文中总共有40个测量点,每个测量点的测量角度数总共为18,得到了大量的测量数据。在性能评估时,为了得到测量点的个数与误差距离的关系,本文从所有测量点中随机选取一定数量的测量点,将在这些测量点上得到的测量数据作为实验数据,然后使用PDAPL估计AP的位置,得到平均误差距离。该过程重复多次,最终得到测量点个数与平均误差距离的关系。同理,从所有的测量角度中随机选取一定数量的角度,将在这些角度上得到的测量数据作为实验数据,计算平均误差距离,重复多次随机选取,最终得到测量角度数与平均误差距离的关系。
图12表示使用4种算法对11个AP定位的结果,其中测量点的个数为15,每个测量点测量的平均角度数为10。从图12中可以看出,PDAPL的定位精度明显高于另外3种算法,其最大的误差距离为32 m,最小的为5 m左右,平均误差距离为20 m左右,大概一个房间的范围;而DrivebyLoc的最小的误差距离为20 m,最大的达到80 m,平均误差距离为50 m左右;Distance和AoA的误差距离更大。这是由于在DrivebyLoc, Distance和AoA中,只用每个测量点中信号强度最大的角度值,而总共的测量点个数只有15个,每个AP平均只有5个测量点接收到相应的信号,测量点个数比较少,可利用信息比较少,导致较大的误差;并且Distance直接利用对数距离传播模型,AoA直接利用信号强度最大的角度,这两种方法中,每次的测量值都会对AP的位置产生直接影响,可能会因为某次的测量误差或模型不合适导致平均误差距离变大,因此这两种方法的定位性能低于另外两种;而本文提出的PDAPL,利用的是每个测量点的所有角度的信号强度,并且每次不是估计出一个AP的方向或位置,而是对整个实验区域的概率进行估计,相对于另3种方法而言,可利用的信息比较多,且不会因某次测量对结果产生很大的影响,因此定位的误差较小。
图13为不同算法中测量点的个数对平均距离误差的影响,其中每个测量点平均测量的角度数为10。从图中可以看出,初始情况下,当测量点的个数为15时,PDAPL的平均距离误差值最小,DrivebyLoc其次,Distance和AoA比较大;随着测量点个数的增加,4种算法的平均误差距离都有所降低,其中,PDAPL降低得比较缓慢,并且一直是最低的,说明当只有15个测量点时,定位能力已经比较好;DrivebyLoc降低得最为明显,当增加至40个测量点时,其值和PDAPL的差不多,这是由于DrivebyLoc中记录各测量点估计的AP的方向,当测量点数量增加时,得到的估计AP方向较多,进而能够得到较小的定位误差。当需要达到相同的定位精度时,PDAPL只需要15个测量点,而DrivebyLoc需要35个,Distance和AoA需要的更多。因此当每个测量点平均测量的角度数相同时,PDAPL需要的测量点最少,并且定位精度较高。
图14表示每个测量点平均测量的角度数对平均距离误差的影响,其中测量点的个数为15。从图14中可以看出,当每个测量点测量的角度数为2时,4种算法的平均误差距离都很大;随着角度数量的增加,4种算法的平均误差距离都显著下降,其中PDAPL和DrivebyLoc下降得最为明显,Distance和AoA降低得较为平缓,不过当角度个数增加时,测量花费的时间和人力也会相应增加。从图14中可以看出,当测量的角度数为12时,PDAPL的平均误差距离为20 m, DrivebyLoc的平均误差距离为40 m;当测量的角度数为18时,PDAPL的平均误差距离为15 m, DrivebyLoc的平均误差距离为21 m。当需要达到相同的定位精度时,PDAPL需要的角度数为10,而DrivebyLoc需要的角度数为18,另外两种方法需要的角度数更多。因此,当测量点的个数相同时,PDAPL需要测量的角度数最少,并且定位精度较高。

图12 不同算法的误差距离

图13 测量点的个数对定位的影响

图14 测量的角度数对定位的影响
从上面的分析中可以得出,本文提出的PDAPL只需要在少量点和少量角度收集数据,就能得到较好的定位精度。在需要得到相同定位精度时,PDAPL所需要的测量点和测量角度数只是DrivebyLoc的一半左右,比Distance和AoA更少。在相同数量的测量点和测量角度时,PDAPL的定位精度相对于DrivebyLoc提升了50%左右。
4 结论
本文研究了一种利用定向天线对AP的位置进行估计的算法,并设计了一个基于Arduino的智能小车来自动获取相关数据。该算法利用定向天线各方向增益不同的特点,通过多点多角度的测量,获取待定位AP的信号,根据测量点信号强度的理论值和实际值之差估算AP在实验区域各点的概率,最后通过对整个区域的概率密度表进行分析,估算出AP的位置。实验结果表明,本文算法只需要在少量点和少量角度收集并记录信号强度,就可以得到较好的定位精度。在需要得到相同定位精度的情况下,PDAPL所需要的测量点和测量角度只是DrivebyLoc的一半左右,比Distance和AoA更少。在相同的测量点和测量角度数时,PDAPL的定位精度相对于DrivebyLoc提升了50%左右,比Distance和AoA提升得更多。
[1] Liu Hui, Darabi H, Banerjee P, et al.. Survey of wireless indoor positioning techniques and systems[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, 2007, 37(6): 1067-1080.
[2] Bialer O, Raphaeli D, and Weiss A J. Maximum-likelihood direct position estimation in dense multipath[J]. IEEE Transactions on Vehicular Technology, 2013, 62(5): 2069-2079.
[3] Wang Gang, Li You-ming, and Ansari N. A semidefinite relaxation method for source localization using TDOA and FDOA measurements[J]. IEEE Transactions on Vehicular Technology, 2013, 62(2): 853-862.
[4] Sen S, Lee J, Kim K H, et al.. Avoiding multipath to revive inbuilding WiFi localization[C]. Proceedings of 11th Annual International Conference on Mobile Systems, Applications, and Services, Taipei, 2013: 249-262.
[5] Liu Hong-bo, Yang Jie, Sidhom S, et al.. Accurate WiFi based localization for smartphones using peer assistance[J]. IEEE Transactions on Mobile Computing, 2014, 13(10): 2199-2214.
[6] Ji M, Kim J, Cho Y, et al.. A novel WiFi AP localization method using monte carlo path-loss model fitting simulation[C]. Proceedings of IEEE 24th International Symposium on Personal Indoor and Mobile Radio Communications (PIMRC), London, 2013: 3487-3491.
[7] Koo J and Cha H. Localizing WiFi access points using signal strength[J]. IEEE Communications Letters, 2011, 15(2): 187-189.
[8] Roberts B and Pahlavan K. Site-specific RSS signature modeling for WiFi localization[C]. Proceedings of Global Telecommunications Conference, Honolulu, HI, 2009: 1-6.
[9] Le T M, Liu Ren-ping, and Hedley M. Rogue access point detection and localization[C]. Proceedings of IEEE 23rd International Symposium on Personal Indoor and Mobile Radio Communications (PIMRC), Sydney, NSW, 2012: 2489-2493.
[10] Rahman A, Amiruddin M, Dashti M, et al.. Localization of unknown indoor wireless transmitter[C]. Proceedings of 2013 International Conference on Localization and GNSS(ICL-GNSS), Turin, 2013: 1-6.
[11] Chun S M, Lee S M, Nah J W, et al.. Localization of Wi-Fi access point using smartphone's GPS information[C]. Proceedings of 2011 International Conference on Selected Topics in Mobile and Wireless Networking (iCOST), Shanghai, 2011: 121-126.
[12] Han D, Andersen D G, Kaminsky M, et al.. Access point localization using local signal strength gradient[C]. Proceeding of Passive and Active Network Measurement, Seoul, Korea, 2009: 99-108.
[13] Achtzehn A, Simic L, Gronerth P, et al.. A propagation-centric transmitter localization method for deriving the spatial structure of opportunistic wireless networks[C]. Proceedings of 10th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Banff, AB, 2013: 139-146.
[14] Koo J and Cha H. Unsupervised Locating of WiFi access points using smartphones[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, 2012, 42(6): 1341-1353.
[15] Chen Yin-jie, Liu Zhong-li, Fu Xin-wen, et al.. Theory underlying measurement of AOA with a rotating directional antenna[C]. Proceedings of IEEE INFOCOM, Turin, 2013: 2490-2498.
[16] Subramanian A P, Deshpande P, Gaojgao J, et al.. Drive-by localization of roadside WiFi networks[C]. Proceedings of 27th Conference on Computer Communications, Phoenix, AZ, 2008: 718-725.
[17] Zhang Zeng-bin, Zhou Xia, Zhang Wei-le, et al.. I am the antenna: accurate outdoor ap location using smartphones[C]. Proceedings of 17th Annual International Conference on Mobile Computing and Networking, Las Vegas, Nevada, USA, 2011: 109-120.
[18] Akl R G, Tummala D, and Li Xin-rong. Indoor propagation modeling at 2.4 GHz for IEEE 802.11 networks[C]. Proceedings of Sixth International Association of Science and Technology for Development (IASTED) International Multi-Conference on Wireless and Optical Communications, Banff, Alberta, Canada, 2006: 120-150.
陈 兵: 男,1970年生,教授,博士生导师,研究方向为计算机网络、通信安全.
杨小玲: 女,1990年生,硕士生,研究方向为计算机网络.
A WLAN Access Point Localization Algorithm Based on Probability Density
Chen Bing Yang Xiao-ling
(College of Computer Science and Technology, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
The Access Point (AP) in Wireless Local Area Network (WLAN) can be localized. In this paper, an AP Localization algorithm based on the Probability Density (PDAPL) is proposed. First, the region is portioned into several cells. Then, the probability of each cell is calculated according to the receive signal strength from the directional antenna in different locations and different angles, and a probability statistical table is constructed. Finally, the location of AP is assessed. Experiment results demonstrate that the proposed algorithm does not require a lot of data and can obtain relative high accuracy with a small number of measurement points and angles. Compared with DrivebyLoc, Distance, and AoA, half of or fewer measurement points and angles are needed in the case of the same accuracy with PDAPL. And for the same measurement points and angles, the accuracy of PDAPL is improved about 50% compared with DrivebyLoc.
Wireless communication; Access Point (AP) localization; Directional antenna; Probability density
TN92
: A
:1009-5896(2015)04-0855-08
10.11999/JEIT140661
2014-05-21收到,2014-10-31改回
江苏省产学研联合创新资金(BY2013003-03)资助课题
*通信作者:杨小玲 yxl_9009@163.com
