基于DRV8312的直线电机控制系统设计与实现
2015-07-11季兰龙曹荣敏周惠兴
季兰龙,曹荣敏,周惠兴
(1.北京信息科技大学自动化学院,北京100192;2.中国农业大学工学院,北京100083)
1 引言
控制系统的研究对象为永磁式动圈型直流直线电机。直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相当于直线电机的初级,转子相当于直线电机的次级,在直线电机的三相初级绕组通入三相正弦交流后,会产生行波磁场,次级导条在行波磁场切割次下产生感应电动势并产生电流。导条的电流和气隙磁场相互作用便产生电磁推力[1]。在这个电磁推力的作用下,如果初级和次级中的一个固定不动,则另一个就会作相对运动。从而实现运动部件的直线运动,如图1所示。
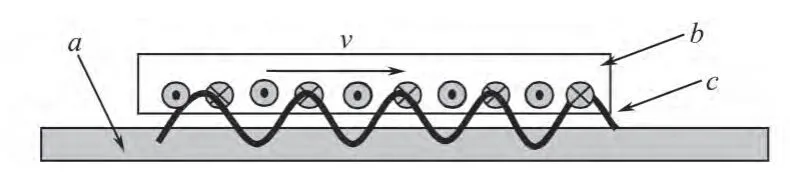
图1 交流直线电机气隙中的行波磁场Fig.1 Traveling magnetic field of linear motor
图1中,a 为初级,b 为次级,c 为行波磁场在直线方向上呈正弦分布,v为行波磁场的移动速度也等于动子的运动速度。
由于直线电机的负载直接与直线电机的动子相连,负载的运动变化和外部扰动直接作用于直线电机上,因此对直线电机的控制提出了较高的要求。结合现阶段直线电机的控制理论和应用研究现状,本文采用德州仪器(TI)推出一款可驱动无刷直流(BLDC)与永磁同步(PMSM)电机的完整电机控制评估套件。该控制器基于专用集成型电机控制芯片比较传统分立式器件组成的控制器具有结构简单、外围器件少、功能齐全、可靠性高等特点。因为直线电机的工作原理和BLDC 相似,故采用该套件可以加快直线电机驱动控制的研发和应用。
2 系统组成及硬件设计
本系统应用TI公司旋转电机驱动器,实现直线电机的伺服驱动控制。通过直线电机的闭环控制,实现跟踪电机位置和速度指令的变化。
2.1 系统组成
直线电机控制系统总体框架图如图2所示。
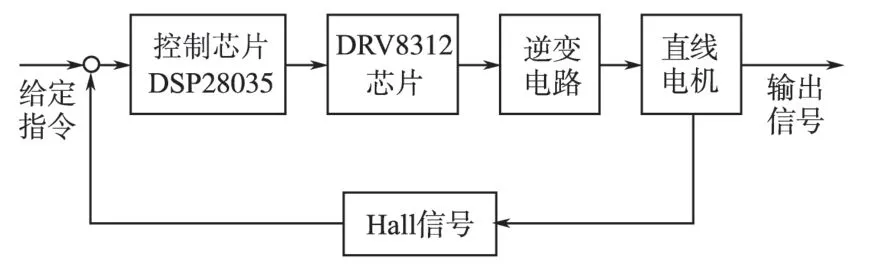
图2 直线电机控制系统总体框架图Fig.2 Linear motor control system overall frame
驱动器的控制芯片采用TI公司的DSP TMS 320F28035,设定电机运行速度指令,由DSP芯片发出PWM 信号,通过DRV8312 芯片进行调理、放大、处理后将PWM 信号传送给三相全桥逆变电路,控制逆变电路MOSFET器件的依次通断状态,产生直线电机运动所需的三相交流电流,驱动直线电机运动。DSP产生的PWM信号通过实时检测直线电机中的霍耳传感器反馈的电机次级位置信号来确定[2]。
直线电机采用U型直线电机,具体参数为:额定输出力30 N,定位精度5 μm,最大运行速度1 m/s,允许加速度(3~5)g,最大有效行程380 mm。
电机驱动器的硬件电路分为控制电路和功率驱动电路。控制电路主要包括控制芯片DSP及其外围电路、DRV8312 驱动芯片及其外围电路、霍耳传感器接口电路、RS232通讯电路和数字I/O电路等。功率驱动电路包括输入电源及其保护电路、电平转换电路、三相逆变电路、PWM 信号驱动电路、电流采样电路等。
2.2 功率驱动电路
功率驱动逆变电路控制器件的通断,实现将直流电流转变为交流电流的方式来驱动电机。在本设计中使用的电压型PWM三相全桥逆变器由6 个MOSFET 开关管和6 个续流二极管组成,其中逆变电路原理图如图3所示。
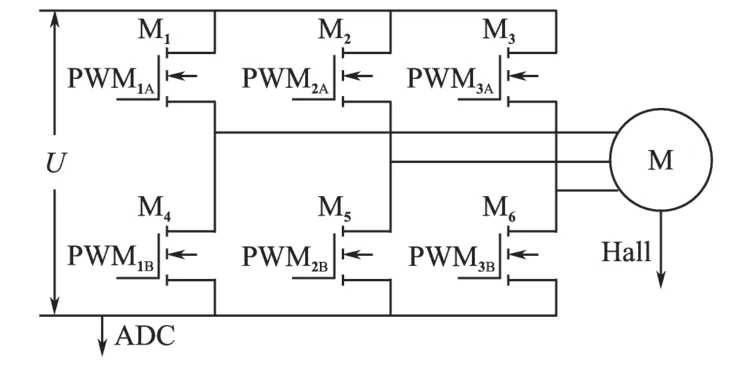
图3 逆变电路工作原理图Fig.3 Principle diagram of the inverter circuit
图3中M1,M2,M3,M4,M5,M6为6 个MOSFET 开关管和6 个续流二极管,每个开关管和续流二极管反相并联组成三相全桥的3个桥臂。M为直线电机;U为直流电压;Hall为霍耳传感器检测的电机信号。不考虑触发信号的死区时间,上桥臂开关管的控制信号和下桥臂开关管的控制信号成互补关系,即上桥臂触发信号为“1”时,下桥臂触发信号就为“0”。每个桥臂的导通角度为180°,同一相的上下两个桥臂交替导通,每个相开始导通的角度依次相差120°,这样在任意时间只有一对上下两臂同时导通[3]。这样就形成了驱动电机运动的三相交流电流。
2.3 控制信号电路
控制电路主要完成转子位置信号的译码、驱动信号的生成、PWM斩波信号的控制、转速检测与控制等功能。
位置和速度传感器采用3 个霍耳效应(HALL)传感器,霍耳传感器通过检测永磁体磁极信号脉冲到达的时刻不同和时间间隔,得到直线电机动子的位置速度和运动方向信息。霍耳信号经过编码后发送给DSP F28035 输入捕获引脚(CAP,QEP),依据转子信号的不同决定三相全桥逆变电路中上下桥臂的关断次序。3个霍耳效应传感器给出3 个180°重叠信号,从而提供6 个强制换相点。当检测到传感器输出的上升和下降边沿时,生成相应的标志[4]。
电流检测电路,由放置在主线路上的采样电阻检测电机电流大小,将电流信号处理转换为电压信号,后经模数转换(ADC)送至DSP芯片处理运算[5]。因为三相逆变电路每一次换流是在同一个相上下两臂之间进行的,电机内部每次只有1个电流。因此,只需放置1 个电流传感器就可检测电机3个相电流[4]。每一次电流测量使DSP在一个PWM周期开始载入全新的PWM占空比。
整体硬件功能原理示意图如图4所示。
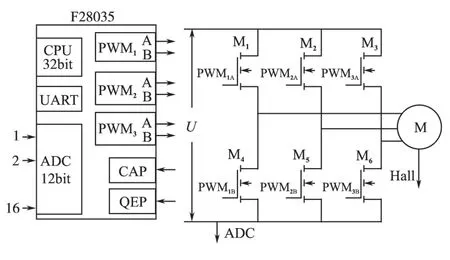
图4 整体硬件功能原理示意图Fig.4 The overall hardware function principle diagram
图4左侧为DSP芯片内部硬件工作原理示意图,PWM1~PWM3可以产生6 路PWM 信号,并分别控制右侧逆变电路中6 个开关管的通断。CAP,QEP为捕获和正交编码单元用于对电机Hall信号处理,ADC 单元用检测逆变电路的电流。UART用于DSP程序和计算机上位机的通信。
3 系统软件设计及实现
程序设计目标针对开发板上控制DSP 控制芯片编程,实现采用霍耳效应传感器的直线电机控制。
3.1 程序设计流程
程序采用Code Composer Studio v5.3 版本进行开发,采用结构体模块化、功能递增构建方案。
程序进行一系列相关初始化后,DSP 启动PWM 波形产生程序,进入中断循环。采样电阻测量到的直流总线电流通过模数转化器(ADC)发送给DSP。在电路板上对采集到的电机霍耳效应信号进行处理,并将信号发给DSP 的GPIO引脚,DSP控制芯片根据反馈回来的电流和直线电机位置速度信号进入PID 调节,以实现控制电机的伺服控制[6]。
程序流程图分为主流程图和中断程序图,如图5a、图5b所示。
3.2 程序结构功能
程序主控制芯DSP 28035 设为60 kHz 的PWMDAC;中断采用DSP 定时器0 执行40 kHz的中断服务程序;控制器芯片TMS320F28035 配置为PWM1,PWM2,PWM3用于电机控制,PWM6A,PWM6B,PWM7A和PWM7B用于DAC输出[8]。系统程序主要配置信息如表1所示。
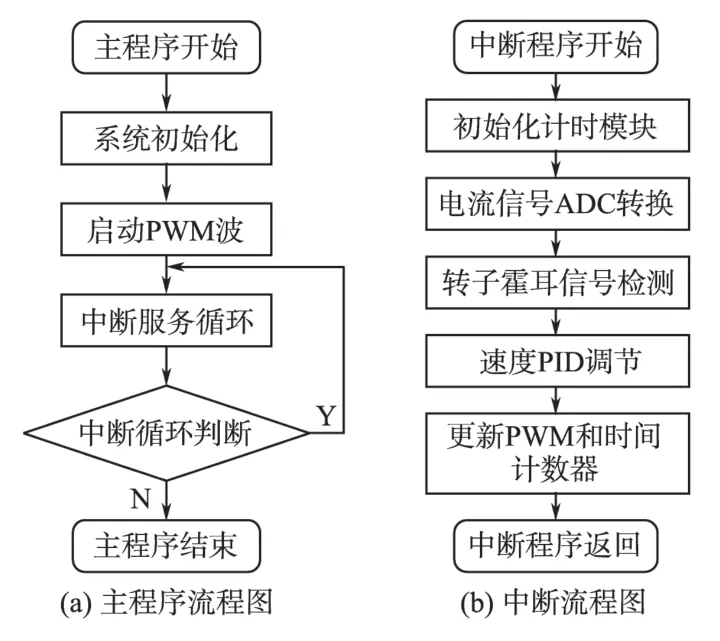
图5 电机控制程序流程图Fig.5 Motor control program flow chart
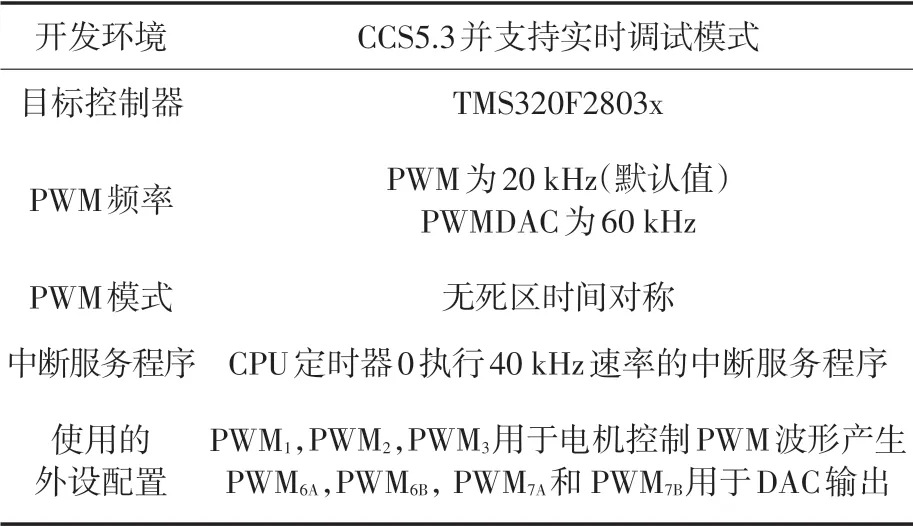
表1 系统程序配置特性Tab.1 System configuration features
程序结构功能总体方框图直观表示如图6所示。
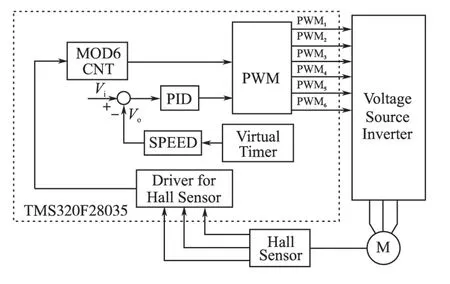
图6 程序结构功能总体方框图Fig.6 The overall program structure function block diagram
图6中,虚线方框模块为DSP 程序中定义的功能函数结构体形式[9]。
MOD6_CNT模块输出6个可能值0,1,2,3,4或5。用来对应生成驱动三相全桥逆变电路中功率器件的6个换相状态。
PWM 模块用来产生PWM 实际输出波形PWM1~PWM6用来控制逆变电路开关管的关断。
PID模块为程序中PID结构体的定义和对电机速度设定值和返回值进行电机PID调节控制。
SPEED模块为电机速度测量模块,依据霍耳效应采集的信号进行速度测量。
Hall_Sensor 模块为电机中霍耳效应传感器对采集到的霍耳信号编码等处理。
VIRTUAL_TIMER 模块用来在程序中设置时间长度,其他模块中对电机速度的测量和控制。
其中,SPEED 模块程序控制主要代码如下所列。

3.3 用户界面(UI)设计操作
DRV8312 电机驱动控制板拥有良好的用户交互控制显示界面。能够很好地显示电机运行状态和程序中重要的变量参数变化信息。
在确保硬件连接正确的情况下,把GUI程序写入到DSP F28035 的固化Flash 中,然后运行DRV8312GUIv X.exe 程序,便会出现用户交互(UI)界面,如图7所示。
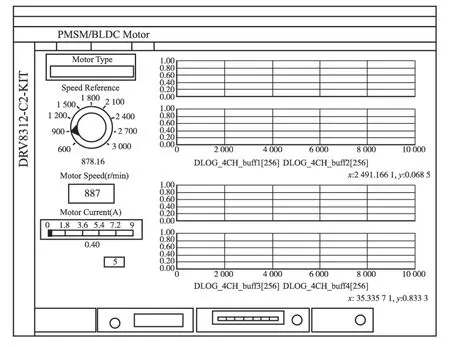
图7 上位机DRV8312界面Fig.7 PC interface of DRV8312
可通过图7用户交互(UI)界面左侧旋钮来调节电机运行速度,中间为电机速度实时显示,最下方的条形刻度条为电机相电流值。右侧曲线为程序中主要变量变化:第1 栏为程序中变量Counter 的6 个取值(对应6 个PWM 换相状态);第2 栏为霍耳传感器采集到的电机位置编码信号;第3、第4栏为相电压的反电动势。
4 实验调试
4.1 程序设定和霍耳信号验证
运行时程序中变量Counter 的6 个取值变化和对应的霍耳传感器采集到的电机位置编码信号波形图如图8所示。
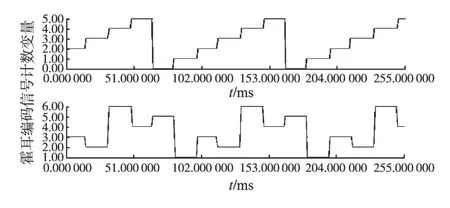
图8 变量Counter和霍耳信号波形图Fig.8 Variables Counter and the hall signal waveforms
分析图8 可知变量Counter 的6 种可能取值(第1栏)分别上下对应电机霍耳信号(第2栏)的6种状态,也与电机6个运行状态对应,和程序设计思想一致。这样可以使PWM波形精确控制全桥逆变电路中功率管的导通和关断,实现直流转化为三相交流驱动电机运转。
4.2 逆变电路和反电动势验证
电机A,B,C相反电动势波形如图9所示。
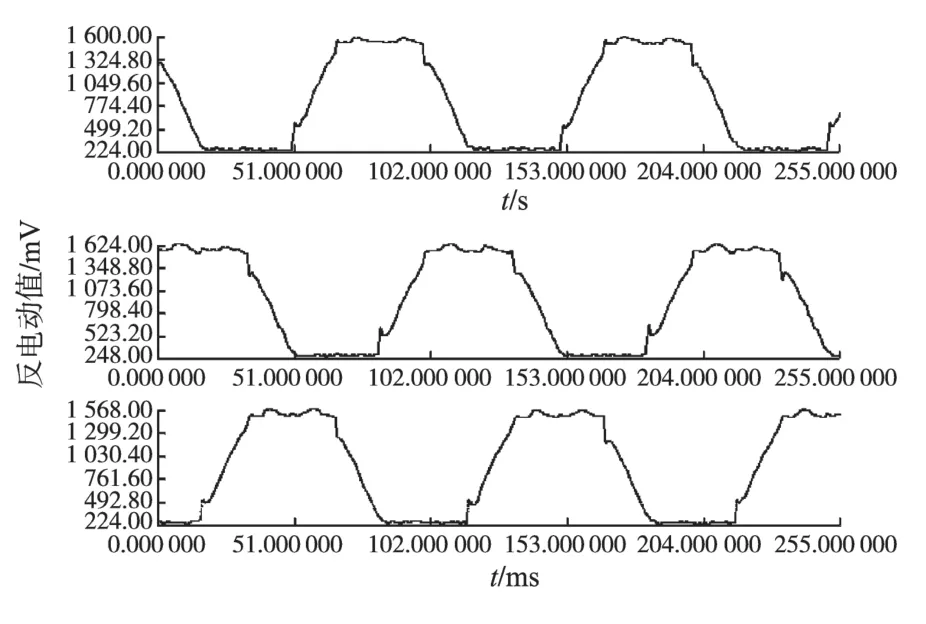
图9 反电动势A,B,C相波形图Fig.9 The back emf waveforms figure
图9由上向下依次为A,B,C 相的反电动势,分析可以看出实验所得A,B,C 反电动势在同一时刻只有一个导通(处于最高值),依次导通形成三相交流电流,和电机控制所需电压波形相符合。
由于反电动势取决于电机的运行速度,可以通过监控显示3 个反相电动势变量的值交替变化,来验证每相中采样电流ADC的运行情况。由图9可以看出反电动势波形图和梯形图与理论上的波形图符合。直流驱动电流与梯形反电动势组合作用使得电机能够产生一个恒定转矩。
4.3 设定速度值和实际速度值比较
电机在不同设定速度下的实际运行速度,实验结果如图10 所示。由于上位机监控显示界面针对的是旋转电机(无刷直流BLDC),此时测量值是将直线电机参数转化为直流无刷电机运行参数显示。该型号无刷直流电机为TI 公司生产的Nema Size 17 BLDC Motor,最高转速为4 000 r/min。
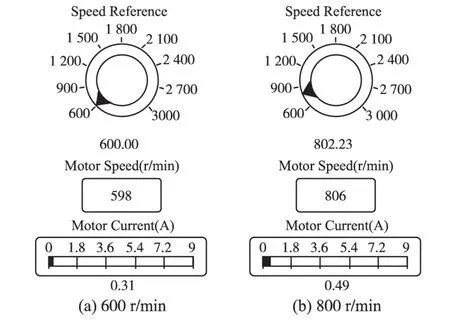
图10 设定转速和实际运行转速Fig.10 Set speed and actual running speed
图10中上方旋钮可以设置电机运行速度,中间条形显示界面为电机实际反馈的速度,最下面为电机运行时线圈电流值。
由实验结果可以看出,图10a 速度设定为600 r/min,实际测得电机转速为598 r/min;图10b速度设定为800 r/min,实际测得转速为806 r/min。可以看出电机的实际运行速度和设定速度接近,本次误差为6 r/min 说明达到预期速度伺服控制效果。
4.4 PWM占空比调节和速度响应实验
图11a、图11b 分别为PWM 波形占空比设定为0.1 和0.2 时速度显示。上方条形显示框为电机运行速度显示,下方旋钮为PWM 波形占空比设定,也可通过旋钮下面输入框直接输入PWM占空比值。图11c为当PWM波形占空比由0.1变为0.2时电机速度响应曲线。
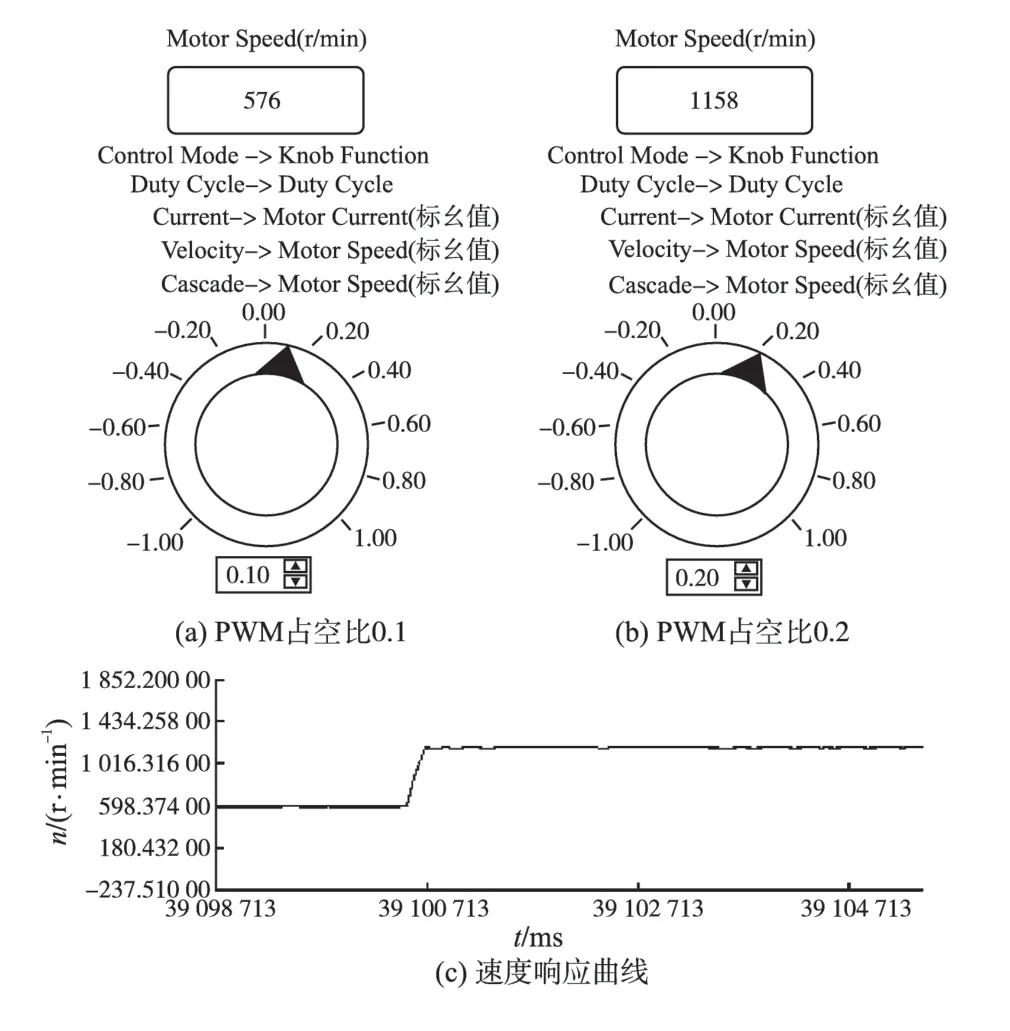
图11 PWM占空比调节和速度响应实验Fig.11 PWM duty ratio and speed response experiment
图11aPWM占空比设定为0.1时速度测量值为576 r/min;图11b PWM 占空比设置为0.2 时速度测量值为1 158 r/min,此时速度约为占空比为0.1 时的2 倍;图11c 为当PWM 波形占空比由0.1变为0.2 时,电机速度由576 r/min 跳变为1 158 r/min 时的速度响应曲线。可以看出速度从576 r/min 到1 158 r/min 响应在较为合理的范围内,实现了对直线电机的快速伺服控制。
根据实验结果可以得出:调节PWM 波形占空比可相应改变电机运行速度;并且速度测量值和PWM 占空比值,成比例对应。由此验证占空比调节和电机运行速度响应正常。
5 结论
本文在分析直线电机控制系统原理基础上,对比传统分立式器件和DRV8312 集成型电机芯片优缺点。实现运用基于TI公司DRV8312 电机驱动控制芯片的直线电机的伺服控制系统。通过实验所得电机运行状态参数和上位机界面实验结果可以看出,通过此方案可以实现直线电机的伺服控制,实现效果达到预期设定目标。
[1]叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2000.
[2]王健.大推力永磁直线伺服电机及驱动器设计[D].沈阳:沈阳工业大学,2005.
[3]冯恺侃.低压永磁同步电机驱动器设计与研究[D].上海:上海交通大学,2010.
[4]李兵强.电机控制通用开发平台研究和设计[D].西安:西北工业大学,2007.
[5]姜淑忠,李小海.电机驱动器中的电流传感器[J].电机与控制应用,2007,34(6):29-32.
[6]Texas Instruments Inc.TMS320LF/LC24 系列DSP 指令和编程工具[M].北京:清华大学出版社,2005.
[7]Texas instruments Inc.BLDC3-1 Brushless DC-Motor-Control[EB/OL].http://www.ti.com/,2013-4-30.
[8]Texas instruments Inc.Digital Motor Control-Software-Library[EB/OL].http://www.ti.com/,2003-10.
[9]Texas instruments Inc.6.5A Three Phase Brushless DC Motor Driver with Inrush Protection[EB/OL].http://www.ti.com/,2013-4.
