盾构柔性推进电液控制策略研究
2015-07-10张合沛李凤远王助锋冯欢欢
张合沛,李凤远,王助锋,冯欢欢
(1.盾构及掘进技术国家重点实验室,河南 郑州 450001;2.中铁隧道集团有限公司,河南 洛阳 471009)
盾构柔性推进电液控制策略研究
张合沛1,2,李凤远1,2,王助锋1,2,冯欢欢1,2
(1.盾构及掘进技术国家重点实验室,河南 郑州 450001;2.中铁隧道集团有限公司,河南 洛阳 471009)
结合现有压力流量复合控制、分组联合控制、负载敏感控制等技术,在盾构电液控制方式上提出改进型压力流量复合控制策略,旨在解决推进油缸工作过程中易出现液压管路受冲击的问题,并通过理论实验对该策略进行验证,对盾构推进系统柔性控制提供一种思路。
盾构;液压冲击;控制策略;柔性;实验
盾构推进系统承担着推进任务并承载着从刀盘系统传递过来的外界载荷,当出现突变载荷较大或大偏载时,推进系统中液压元件溢流、工作介质压缩、液压管道变形以适应外界突变载荷。
经过优化设计的盾构推进系统可以衰减掉部分外界载荷从而减小其对系统造成的损坏。因此,许多学者针对盾构施工过程中的突变载荷及柔性控制策略设计做了相关研究。
柔性是指机械装备对外界环境变化适应能力的体现。盾构柔性推进电液控制主要目标是弱化外界载荷,改善作业环境,使其在载荷突变情况下仍能正常工作。本文设计了盾构柔性推进电液控制策略及盾构柔性推进电液控制流程,并通过盾构电液控制系统和自动化控制系统集成综合实验平台进行模拟实验及结果分析,为指导新一代盾构的设计研发提供了一种方法。
1 控制理论
盾构推进液压系统具有变负载、功率大等特点,且推进油缸数量较多,要求系统对每个推进油缸即可单独控制,也可分组控制,同时保证所有推进油缸的协调及同步控制。因此,在盾构推进液压系统中常采用压力流量复合控制和分组联合控制的方式,即将推进油缸沿圆周方向划分成若干区域(由于所处位置不同,每区的推进油缸数量不同)。
1.1 压力流量复合控制技术
在施工过程中,推进系统需要实现对推进速度及推进压力的双重控制,单纯的速度或压力控制系统均无法满足上述要求。
因此,在盾构推进液压系统中,利用压力流量复合控制的方式实现推进压力与速度的单独控制,大大弱化了二者之间的相互影响。依据所用液压控制元件的不同,压力、流量复合比例控制可分为节流控制和容积控制两种方式。其中,节流控制方式具有系统响应性高、可微流量调节、操作方便、结构简单等优点,但存在能耗较大、系统能效利用率较低等缺点,大多用于小功率液压控制系统;容积控制方式具有节能、能效利用率高等优点,但也存在控制系统动态响应能力差等缺点,多用于大、中功率液压控制场合。根据盾构作业环境及控制需求,主控油路选用容积控制方式,分控油路采用节流控制方式,即分别采用比例溢流阀与比例调速阀进行支路压力与流量的单独控制,如图1所示。
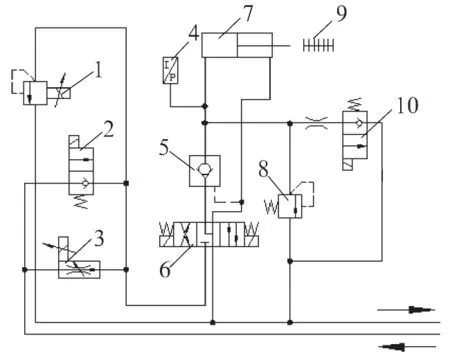
图1 推进系统单个分组液压原理图
系统中均设有压力传感器和位移传感器以实时监测推进油缸的推进压力及位移,并与比例溢流阀和比例调速阀分别构成推进压力及速度闭环控制,达到压力和流量的复合控制,实时控制推进油缸的推进压力及速度。
1.2 分组联合控制技术
盾构在掘进过程中,刀盘或刀架的精确进刀与对刀是非常重要的,若被切削的掌子面的地质较复杂,由于地层阻力的影响,使刀盘在前进过程中容易发生偏离,这时就需要通过推进油缸的协同控制来实现盾构姿态的微调整,若对每个推进油缸单独控制,控制成本及精度都会受到影响,因此,利用分组联合控制方式,对每个子区的推进油缸分别控制,既可以节约成本、提高控制系统可靠性,又可以实现盾构掘进姿态、方向的精确控制。
由于盾构推进阻力不均匀的原因,所以每个区的推进油缸数量及分布密度有所不同,通常是下边的分区推进油缸数量最多,密度最大,上边的分区推进油缸数量最少,密度最小,两边的分区推进油缸数量居中。
2 控制策略
利用了压力流量复合控制、分组联合控制、PID控制、PLC控制等技术原理对盾构柔性推进控制进行研究,基于盾构电液控制系统综合实验平台对盾构柔性推进电液控制策略进行设计。
利用以下控制原理来实现比例压力流量复合控制:首先,对推进油缸的压力、流量信号进行采集、处理、反馈,比例压力阀作为压力流量复合控制的主要执行元件,根据对称取值及平均值原则对系统压力、流量反馈信号进行算法处理,再进行压力、流量实时调整,达到比例压力流量复合控制;比例调速阀实现流量大致范围的控制,提供推进油缸正常推进和比例压力阀稳定溢流所必需的流量,如图2所示。
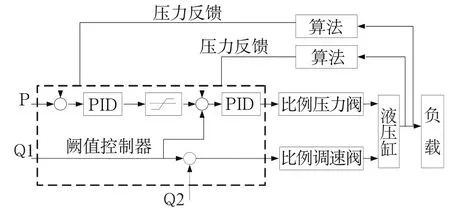
图2 推进系统压力流量复合闭环控制策略
3 控制流程
基于盾构自动化控制系统集成综合实验平台,结合上述控制技术及控制方法,进行盾构柔性推进电液控制软件流程设计,如图3所示。
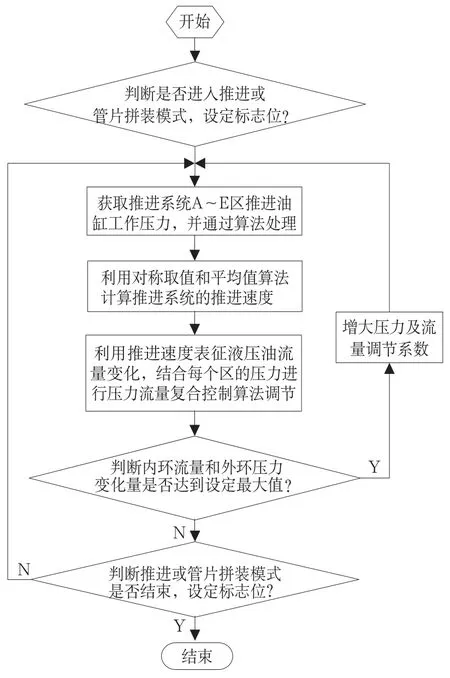
图3 柔性推进控制流程图
4 实验研究
在对推进油缸控制的过程中采用压力流量复合控制方式,结合电液比例控制技术,在控制软件设计上采用PID算法,提高盾构推进系统控制精度,达到柔性控制的实验目标。
在控制系统设计上对A、B、C、D、E五组推进油缸的供油端压力和出油端压力通过传感器进行数据采集、处理,得到五组推进油缸在工作过程中的液压油的实时压力,利用PID算法,根据五个区推进油缸工作压力的实时变化对电液比例阀进行动态调节,在推进速度计算上采用对称取值及平均值原则,使推进速度能够反映液压油流量的线性变化,在柔性控制上利用推进速度变化表征液压油流量变化,形成压力流量复合控制方式,提高系统的动态响应能力,避免对液压管路冲击现象的发生。
根据上述要求进行仿真实验,得到推进系统A~E组工作压力曲线如图4~图8所示。
盾构瞬时推进速度是每个推进工作区的行程传感器在两次行程数据采集、处理时间间隔(Δt)的行程差与Δt的比值为Vt。每个推进工作区的推进速度是根据连续10个瞬时推进速度求得的平均值,即

其中N为A、B、C、D、E。
盾构推进系统的推进速度是根据A、C、E3个工作区的平均推进速度求得,即

通过实验分析,结果如图9所示。
从仿真结果可以得出如下结论:①在控制系统中引入双PID控制,对推进系统在掘进过程中由于荷载突变引起的推进油缸压力变化有明显的抑制作用;②在推进速度计算上采用对称取值及平均值原则,推进速度能够较好反映液压油流量的线性变化情况;③该控制策略能够在非线性大负载工况下实现压力流量的复合控制,提高系统的控制精度和动态响应能力。

图4 推进系统A组工作压力曲线图

图5 推进系统B组工作压力曲线图

图6 推进系统C组工作压力曲线图

图7 推进系统D组工作压力曲线图

图8 推进系统E组工作压力曲线图

图9 推进系统推进速度曲线图
5 结论与建议
在盾构柔性推进电液控制系统设计过程中利用推进速度变化表征推进油缸流量变化方法,形成压力流量复合控制方式,在推进速度计算上采用对称取值及平均值原则,使推进速度能够较好反映液压油流量的线性变化,提高系统的动态响应能力,有效避免液压管路冲击现象。但,该控制策略仅在盾构电液控制系统及自动化控制系统集成综合实验平台进行模拟实验,未在盾构设备施工过程中应用检验,需要后期不断深入研究,去指导盾构控制系统设计。
(编辑 张海霞)
Research of shield fl exible promoting electro-hydraulic control strategy
ZHANG He-pei, LI Feng-yuan, WANG Zhu-feng, FENG Huan-huan
国家高技术研究发展计划(863计划)资助(2012AA041802)
TU621
B
1001-1366(2015)09-0070-04
2015-07-16
