行波法在电气化铁道牵引网故障测距的仿真研究*
2015-07-08张佩炯
张佩炯
(中铁二院西北勘察设计有限责任公司,甘肃兰州730030)
行波法在电气化铁道牵引网故障测距的仿真研究*
张佩炯
(中铁二院西北勘察设计有限责任公司,甘肃兰州730030)
摘要:针对牵引网受到机车运行工况变化影响,以及一些不确定性因素导致出现接地故障的缺陷,提出了一种利用行波法对牵引网故障进行测距的应用方案。依据AT牵引网实际电路,在ATP中建立投切并联电容补偿模型,对机车运行时牵引网的电流进行仿真分析,得到发生短路时的故障数据,再利用Matlab对故障数据进行行波法测距,最后通过搭建硬件电路实验平台进行验证。仿真分析和实验结果表明,利用行波法对牵引网故障进行测距是行之有效的。
关键词:牵引变电所;故障测距;行波
1 引言
近年来,高速电气化铁道快速发展,但由于电力机车的受流方式是单相工频交流制,这导致三相高压电出现明显的不对称性,属典型的负序源。而电力机车又是负荷主体,从设备角度来考虑,它同时又是一个大功率电力电子变换设备,其电流曲线呈现出非正弦特性,尤其是3、5、7次谐波的含量挺大[1]。同时由于单相供电,各相负载不均匀而引起三相不平衡,且随负载实时运行机理而波动,从而会导致牵引供电系统的电压有较大幅度的波动。
高速电气化铁路的安全稳定运行直接受牵引网各个工作环节的影响,牵引网作为牵引供电系统的重要组成环节,对完成供电线向接触线乃至整个系统送电任务起着举足轻重的作用。
因此,在当前高速重载铁道建设快速发展的今天,有效开展牵引网故障测距研究并建立故障测距硬件设备平台显得尤为重要,且具有重要的现实意义。
2 牵引供电系统的基本构成
2.1牵引供电系统的供电方式
牵引变电所和牵引网是构成牵引供电系统的两大主模块[2],其通过接受电网电能,将电网的三相高压电降压、分相之后,由牵引网向电力机车供电,其系统总示意图如图1所示。
牵引网供电的典型方案主要包括带回流线的直接供电方式(DN供电方式)、AT供电方式、BT供电方式等[3],其供电方案示意图分别如图2、图3、图4所示。
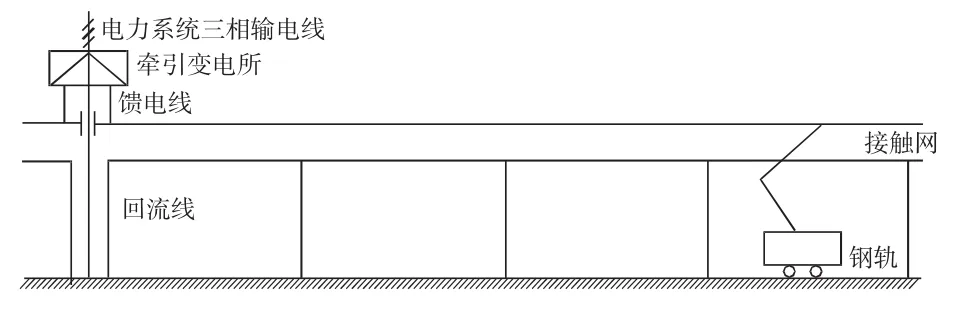
图2 牵引网DN供电方式
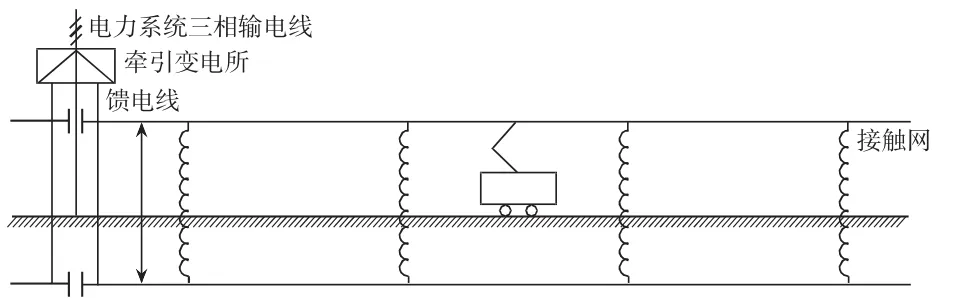
图3 牵引网AT供电方式
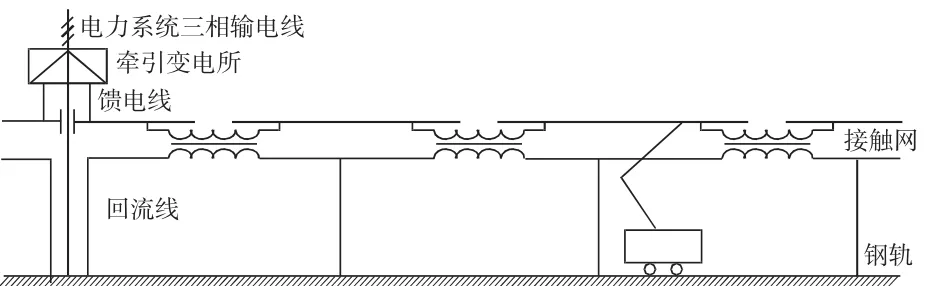
图4 牵引网BT供电方式
2.2牵引网的故障特点
从一牵引变电所引出左右两供电臂,无论电气化铁道的牵引网采用哪一种供电方式,它的一臂接触网接地总是相间短路,这也是牵引供电系统中常遇到的故障形式。因此,故障量的计算一般按两相短路计算,而两相短路不存在零序电流的通路,一臂接触网接地短路时,不向电力系统输送零序电流。牵引供电系统含地系统,故障电流很大,发生故障时,线路上有行波自故障点向两端传播。牵引网中发生接触网与钢轨(T-R)短路故障的几率最多,平均每月发生一次故障[4]。
电气化铁道不论何种供电方式,牵引变电所一般向复线上下行接触网并联馈电,上下行供电臂的末端并联。为提高电气化铁路接触网供电的可靠性,在牵引变电所中采用了自动重合闸的断路器。在短路故障发生时,断路器开断,然后经很短时间再重新关合,如瞬时故障己经消失,则重合成功;如短路故障仍未消除,断路器必须重新开断。如果接触网发生永久故障,上、下行线路将分开运行,故障线路将处于停电状态[5]。
2.3电力牵引负荷的特点
我国电力机车采用的牵引电机为带有补偿绕组的脉流串励电机,它之所以应用于电力牵引是由于其具有良好的牵引特性、机械稳定性、电气稳定性、负荷分配均匀性以及对网压波动敏感性差等许多优点[6]。其直流串励电动机原理图如图5所示。
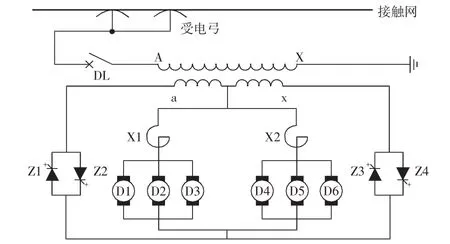
图5 牵引电力机车直流串励电动机原理图
电力牵引负荷的主要特点如下:
(1)牵引状态下时,负荷电流的谐波含量分别为三次谐波25%、五次谐波13%、七次谐波7%;
(2)再生制动状态下时,负荷电流的谐波含量分别为三次谐波含量25.46%、五次谐波14.71%;
(3)空投机车变压器或惰性过电分相状态时,二次谐波电流的励磁涌流含量为40%以上。
3 常见的故障测距方法
常见的传统故障测距方法主要有:电抗法、AT中性点吸上电流比法、上下行电流比法、转移阻抗测距法、单线双差比测距法、吸馈电流比法、行波法等。
多年来,国内外许多专家在不停地探索新的故障测距方法。但有些方法受牵引网运行、供电线路结构等因素的影响,使得测量位置不精确。而行波的传播速度比较稳定,准确度高,速度快,且受各种因素的影响较小[7]。
4 行波法测距原理及测距装置类型
行波法是利用各种数字信号处理算法来实现对故障线路测距的方法[8]。当系统有故障时,从故障点产生的暂态行波向两端传送,暂态行波在传播过程中遇到不均匀介质时,发生反射和透射,利用暂态行波到达的时刻和传播的时间来完成故障定位。馈线上所分布的参数特性使得行波能量在传递的过程中以电压波、电流波的形式在线路中以相应的速度运动,从而行波就形成了[9]。
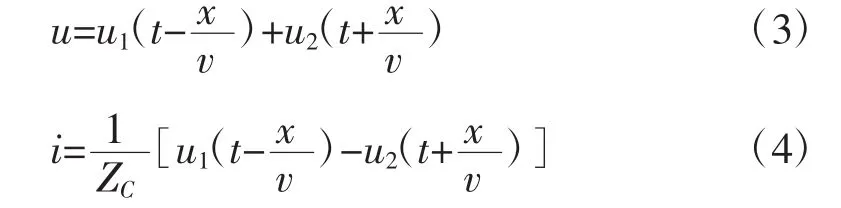
常规情况下,行波包括稳态和暂态行波。单根无损的分布参数,线路上的电压u和电流i,线路上的位置x和时间t,可用偏微分方程来表示,具体方程式为:
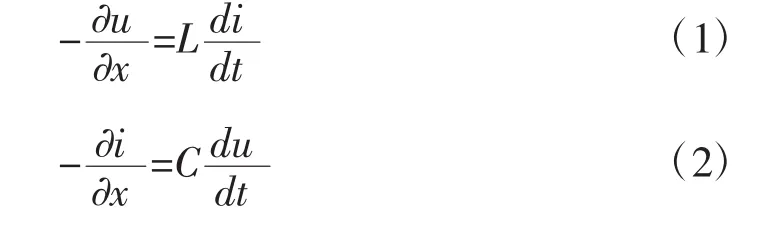
求上述方程组,得下式:
由于行波能够以相应的速率在线路中平稳传播,且测量的故障时间差受线路类型、故障过渡电阻、系统运行参数等因素的影响很小,因此行波法在故障测距方面有较好的实用性和可靠性[10]。现有的行波法测距装置常可分为A、B、C三种类型。
(1)A型测距装置
A型测距装置原理主要是通过索取故障处出现的第一波头和反射回来的第二波头的耗时间隔差来最终确定故障距离的。当线路出现故障后,则电压、电流行波在故障处和母线上不停地发出反射信号,通过高通滤波器滤出行波波头信号,进行故障距离计算。A型行波测距原理示意图如图6所示。
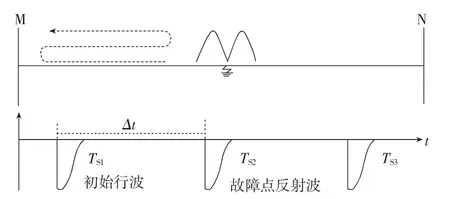
图6 A型行波测距原理示意图
假设线路的长度为L,波速为v,第一个波头和在故障处反射回来的第二个波头时间分别为TS1、TS2。
故障距离XS由下式计算可得:

A型测距装置的优缺点:结构较简单,在线路的一端安装即可,没有必要进行端对端数据关联;但在故障处反射过来的波受系统结构的影响较大,识别第二个波头很因难,测距效果可能不佳。
(2)B型测距装置
B型测距也称作两端测距。当线路发生故障时,行波从故障处向线路两端传播,一端检测到信号时计时开始,同时另一端检测到故障信号时发出指令,当计时端接收到信号时计时停止,从而来确定故障距离。测距装置的原理示意图如图7所示。
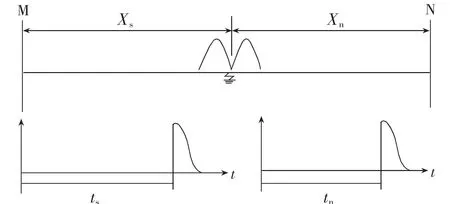
图7 B型行波测距原理示意图
假定ts和tn分别为故障初始行波波头到达两侧母线的时间,依据安装于线路两端的测距装置记录下的参数,计算故障距离的公式如下:

B型测距装置的优缺点:结构简单,测距可靠,精度高,但需双端安装测距装置;随着微波、光纤通信在电网领域的发展,B型双端测距装置的应用变得越来越广泛。
(3)C型测距装置
C型测距装置是在故障发生时由测距装置向故障线路发射附加的高频直流脉冲信号,首先由计算脉冲信号发出信号,此时计时开始,再让附加脉冲发出信号,通过故障处反射回来的时刻来确定故障距离。C型行波测距原理示意图如图8所示。
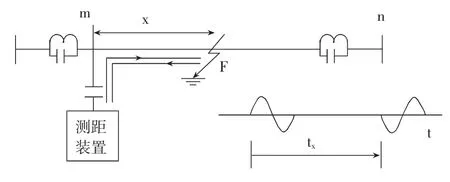
图8 C型行波测距原理示意图
C型测距装置的优缺点:结构简单,精度较高,但需附加高压脉冲信号发生器等设备,成本很不划算;在实际使用中,由于发射高压脉冲信号的强度不能太高,这样就很难区别故障点的反射脉冲,从而影响装置测距的可靠性;但在线路断开的情况下,C型测距装置能力可得以发挥,可以查出线路是否有故障,从而可有效避免手动、自动重合闸到永久性故障线路上。
5 行波法在电气化铁道牵引供电系统中的故障测距
5.1投切并联电容补偿器的行波测距仿真
仿真软件采用ATP和Matlab7.0,利用ATP强大的电磁暂态仿真能力,得到仿真数据,再通过Matlab软件绘制出故障后的电压、电流波形。
按常规设置,牵引所向上、下行接触网的供电臂末端并联馈电。单个供电臂长度为30km,每隔10km处设AT所,悬挂方式为全补偿简单链型悬挂,支柱侧面限界设置为3m。牵引所AT供电方式下工频电源的电压有效值为55kV,阻抗设为1+j10Ω。在仿真时,应考虑牵引母线、电流互感器、电压互感器、牵引变压器、隔离开关、绝缘子等设备对地的电容,其值可设为0.5μF,并且接于牵引母线处。
接触线的型号为TGG-100,导高为5800mm,直流电阻为0.197Ω/km。承力索型号为GJ-70,结构高度为1400mm,直流电阻为2.0Ω/km。正馈线的型号为LJ-185,等效半径为0.7cm,正馈线离轨平面的高度为6600cm,距离线路中心线的水平距离为3900mm,直流电阻为0.162Ω/km。钢轨的型号为P50,轨距为标准轨距1435mm,周长为60.6cm,直流电阻取0.24Ω/km,钢轨对大地的泄漏电阻为10Ω/km,钢轨距地面的高度为1m。假设大地的电阻率为100Ω·m。上下行的线路内侧钢轨间距为5m。假设当线路中有机车运行时,每列车的功率为6400kW,功率因数为0.85。
机车可以用一等效阻抗来表示,经计算,其值为97.656+j157.575Ω。假设当在牵引变电所中投入并联补偿电容器组时,所加的并联补偿电容器组为8串7并,且每一个电容器容量为100kVar,额定电压为10.5kV。并联补偿电容器组可以用一电容和电感等效,其电容值为2.5263μF,电感值为481.2846mH。建立投切并联补偿电容器组的ATP仿真模型如图9所示。
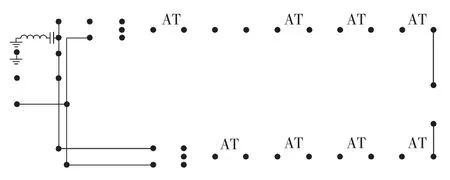
图9 投切并联电容补偿器的ATP仿真模型
在建模时,上、下行线路分别按三相架空线的模型建立线路的仿真模型,不考虑线路之间的电磁耦合,把接触线和承力索作为一相的两分裂导线,钢轨作为一相的两分裂导线,正馈线为一相导线。
假设在0.5ms时上行供电臂8km处发生接触网接地故障。图10为投入并联电容器组后故障点电流ATP仿真波形图。
统计和搜集投切电容器组后8km处的电流仿真数据,然后对这些数据进行小波变换,可以求出模极大值。图11为投切电容器组后8km处故障的仿真数据在Matlab中的小波变换及其模极大值。
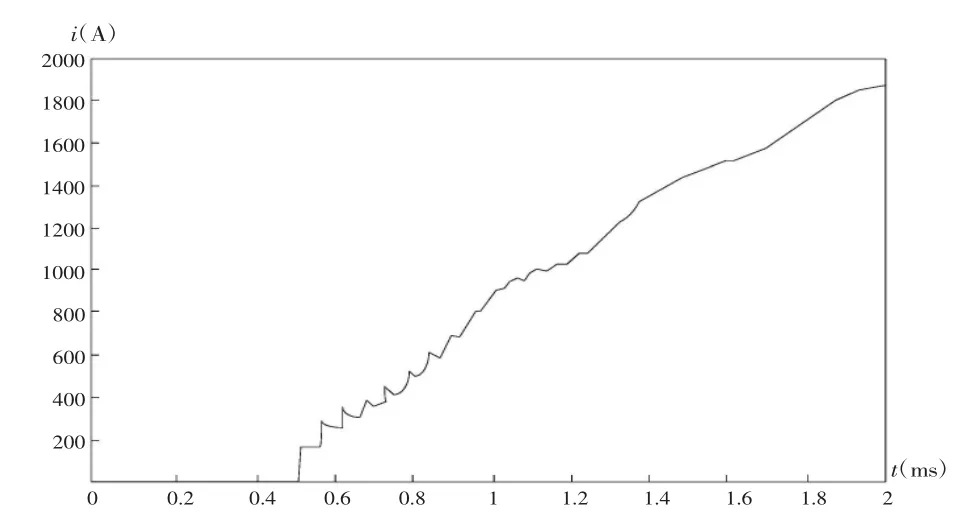
图10 投切并联电容补偿器后的电流ATP仿真波形
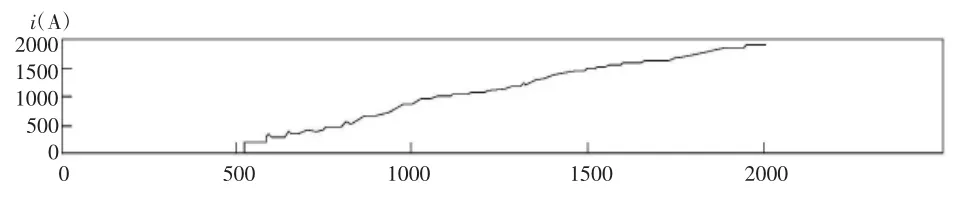
图11 投切并联电容补偿器后的小波变换及其模极大值
表1为空载情况下并联电容器组对行波测距的影响。
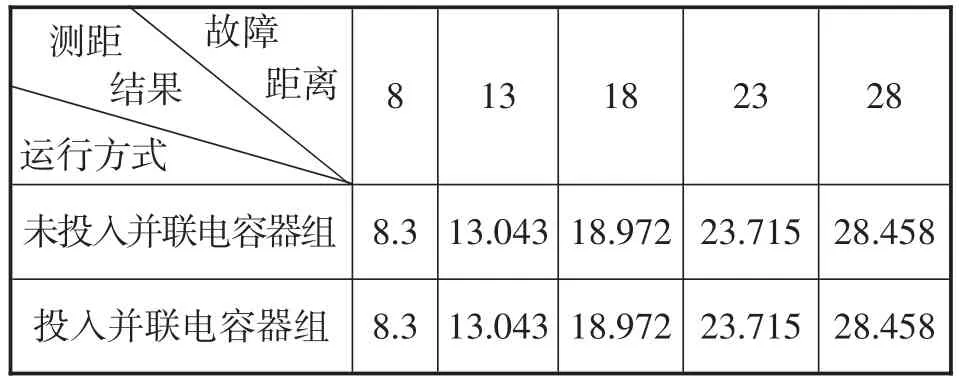
表1 行波测距(单位:km)
从上述仿真结果可以看出,投入并联补偿电容器之后,初始行波和故障点的反射波较明显,检测易于进行。由于牵引母线处的反射系数变大了,从而小波变换系数也较大。如表1所示,不论在牵引所中是否投切并联补偿电容器组,对行波测距结果都没有影响。从仿真数据可知,初始行波到达的时刻点为66点,而反射行波到达的时刻点为73点,经过计算得到故障距离为8.3km。
5.2实验验证
为了实验验证形波法测距原理和测距方案的有效性和可行性,兰州交通大学重点实验室设计了一套基于DSP技术的牵引网故障测距装置,目前硬件电路已设计完成,并进行了相关实验平台的搭建。图12为行波法故障测距实验平台装置的具体实物图。
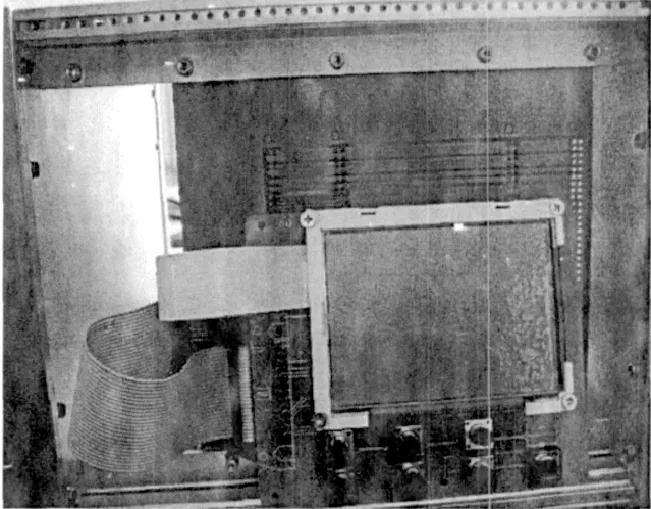
图12 故障测距实验平台装置
牵引网故障测距装置的硬件组成如图13所示,主要由二次变换器单元即电流互感器和电压互感器、A/D转换器、DSP、人机接口单元MMI模块、输入输出开关量单元、微型打印机等主要部分组成。
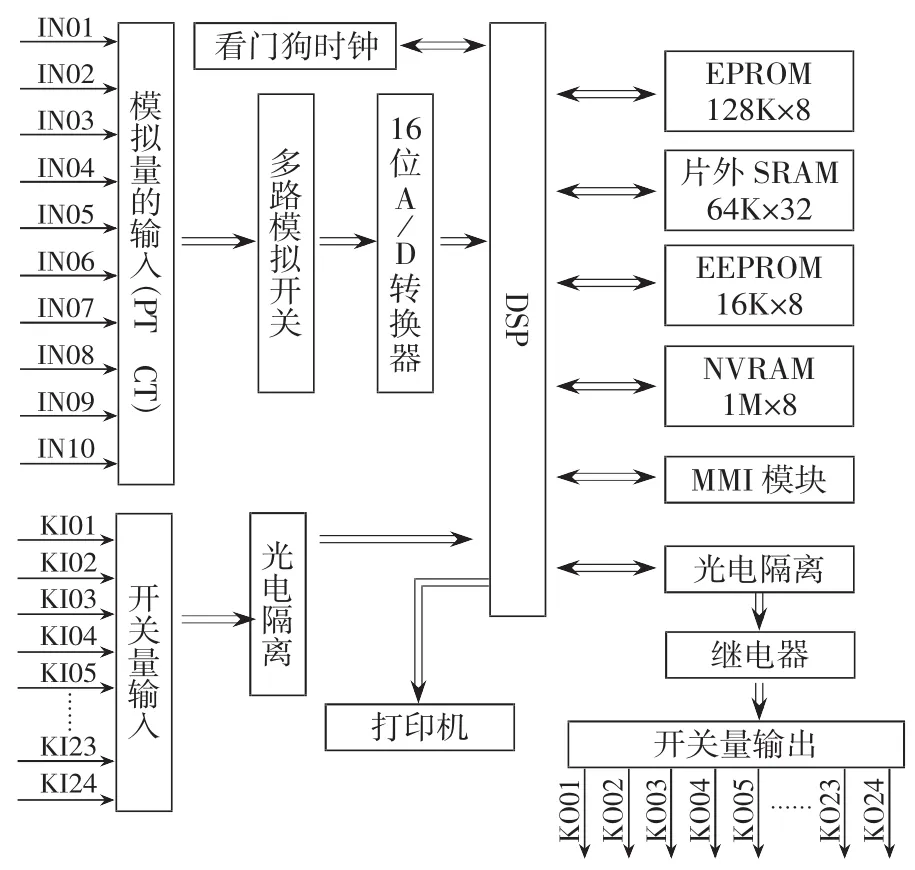
图13 故障测距装置硬件构成图
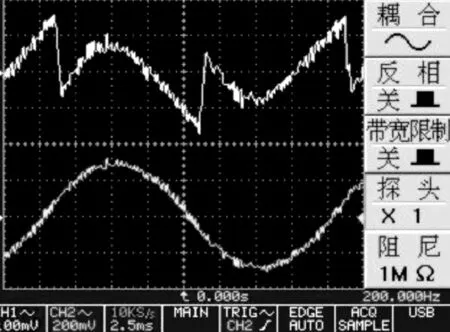
图14 投切并联电容补偿器前后电流波形
投切并联电容补偿器前后的电流波形如图14所示,黄色表示未投切补偿前的波形,蓝色表示投切补偿后的波形。
从波形图可以看出,在未投入并联电容补偿器前谐波含量较大,波形有许多干扰毛刺,波形畸变较严重,而投入并联电容补偿器之后,波形明显有较大改善,毛刺程度减小,呈现出正弦波形,这样有利于故障测距,能够有效提高测量精度。
5 结论
通过本文的仿真研究和实验验证,可得出以下结论
(1)当线路结构确定的状况下,牵引所是否投入并联电容补偿器组,对A、B型行波测距法来说,其结果没有影响。
(2)B型行波法测距在接触网故障测距方面有明显优势,并在测距精度上有很大提高。
(3)行波法故障测距在直供加回流和AT供电方式的供电系统中有很好的推广应用价值。
参考文献:
[1]董新洲,贺家李,葛耀中.基于小波变换的行波故障选相研究[J].电力系统自动化,1999,23(1):95-98.
[2]武中,王志刚,宋述勇,等.电气化铁道牵引变电所对电力系统影响及治理的仿真研究[J].31(12):77-82.
[3]吴命利.电气化铁道牵引网的统一链式电路模型[J].2010,30(28):52-58.
[4]杨乃琪,孟军,骆开源.电气化铁道牵引供电系统实验平台建设与开发[J].9(5):77-82.136-139.
[5]H.Yi,Y.J.Xiong.Analysis on operating Characteristic for 1000kV AC UHV Transmission Line.Power System Technology,2006,30(15):1-7.
[6]陈健鑫.基于信息融合技术的AT牵引网故障测距方法的研究及其仿真分析[J].36(19):25-28.
[7]贺威俊,简克良.电气化铁道供变电工程[M].北京:中国铁道出版社,1982.
[8]曹建猷.电气化铁道供电系统[M].北京:中国铁道出版社,1983.
[9]董新洲,葛耀中,徐丙垠,等.新型输电线路故障测距装置的研制[J].电网技术,1998,22(1):17-21.
[10]曹笃峰.电气化铁道行波故障测距研究[D].北京:北京交通大学出版社,1982.
中图分类号:TM63
文献标识码:A
基金项目:*国家自然科学基金(61263004);甘肃省自然科学基金(1112RJZA051)
文章编号:1005—7277(2015)03—0026—05
作者简介:
张佩炯(1984-),男,甘肃武山人,助理工程师,主要从事电气化铁路牵引供变电技术研究和接触网设计等工作。
收稿日期:2014-11-20
Simulation research on traction network fault location based on traveling wave method
ZHANG Pei-jiong
(CREEC Northwest Survey and Design Co.,Ltd.,Lanzhou 730030,China)
Abstract:Aiming at the traction network affected by the locomotive operation condition changes and some uncertain factors resulting in the defects of the ground faults,the scheme of using the travelling wave method to measure the fault location for the traction network is presented.Based on the actual circuit of the AT traction network in ATP shunt capacitance compensator model,the current of the locomotive traction network running is simulated and analyzed,thus to get the short-circuit fault data,and then can use Matlab to process the fault data and realize the measurement to the fault location by the traveling wave method.The hardware circuit experimental platform is set up.The simulation analysis and experimental results show that the scheme of using the travelling wave method to measure the fault location for the traction network is effective.
Key words:traction substation;fault location measurement;traveling wave