液压传动机构位姿检测方法研究
2015-07-07李海虹解晶琳邹久礼张学良
李海虹,解晶琳,邹久礼,张学良
(太原科技大学机械工程学院,山西太原 030024)
实验技术与方法
液压传动机构位姿检测方法研究
李海虹,解晶琳,邹久礼,张学良
(太原科技大学机械工程学院,山西太原 030024)
为了准确测取液压传动机构的位姿数据用以跟踪控制,该文通过分析转角测量方法的优缺点,根据机构的运动学分析,转换测试思路,提出以液压缸行程的线位移测量取代关节转角测量。以挖掘机工作装置分析为例,在建立液压缸行程与各关节转角的转换模型基础上,利用单片机和Lab VIEW联合开发数据采集及后处理系统,实现各关节转角的实时显示和保存,为自主挖掘的伺服控制系统提供了可靠的位姿数据。
液压传动机构;轨迹跟踪;位姿检测;液压缸行程检测;数据采集
由于液压装置比同体积的电气装置具有更强的动力输出,且液压传动具有无级调速等诸多优点,所以液压传动机构得到了广泛使用。但是,随着传动精度要求的逐步提高,液压伺服控制系统的性能已经成为目前液压技术的重要研究内容,而如何迅速且可靠地获得检测信号是伺服控制系统前端技术研发的关键之一[1],因为没有检测信号或信号不准确时,再完备的伺服系统也无法实现有效控制。
以液压挖掘机实现自主挖掘的研究为例,伺服控制系统需要对挖掘机工作装置的实时位姿进行检测,并用于实现轨迹跟踪、纠偏、轨迹重新规划,以及路径规划更新等[2-9]。依据运动学分析可知,铲斗轨迹由各工作装置的关节转角计算得出,所以最直接的位姿检测方法就是测量各关节铰的角位移[10]。
目前,关节转角数据主要由编码器进行相对式角度测量或由倾角传感器进行绝对式角度测量。采用编码器测量各关节的相对转角存在以下问题[11-12]:(1)工作装置关节采用销轴连接,不便安装传感器;(2)编码器属于高精密传感器,而销轴连接均采用间隙配合,因此轴向与径向位移比较大,导致编码器无法准确测量挖掘机各装置的关节转角;(3)挖掘机工作环境恶劣,常伴随有较大冲击载荷,不仅造成销轴连接处的磨损与变形,而且进一步会影响测量数据的准确性,更有损坏传感器的可能。
而用倾角传感器测量时,需要根据特定转换算法,通过杆件与重力方向夹角计算得出绝对角度,不同机构间的算法通用性较差,而且振动冲击对倾角传感器的影响很大,导致输出信号不稳定,不利于实时控制。
本文综合考虑了工作可靠性、精度和成本等因素,根据挖掘机几何装置模型分析及其运动学分析,转换思路,重新设计测试方案。新测试系统采用线位移传感器,并配套以AD转换电路、串行通信电路、上位机软件等组件,实现铲斗的轨迹跟踪。
1 理论建模
本设计首先需要建立液压缸线性位移与转角的转换模型。挖掘机工作装置如图1所示,3个线位移传感器分别安装在铲斗油缸、斗杆油缸和动臂油缸处。
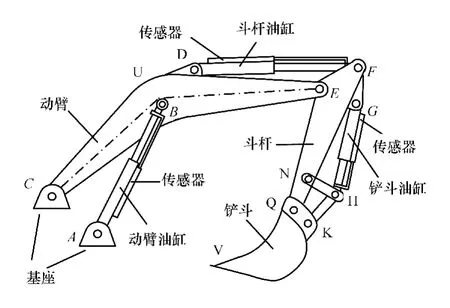
图1 挖掘机工作装置及传感器安装简图
忽略挖掘机工装装置关节转角连接处的销轴大小,建立挖掘机工作装置中的动臂及斗杆关节几何模型简图如图2所示。其中∠ACO′1和∠BCF为结构设计尺寸,不同机型的设计选值不同,在同一分析对象中为固定值,可以从挖掘机设计图纸上直接量取。
1.1 动臂关节转角转换
由图2中可得:
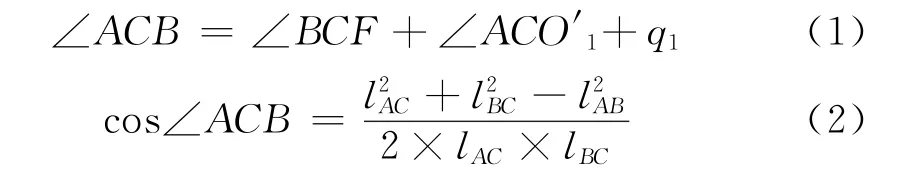
动臂关节转角q1有

1.2 斗杆关节转角转换
由图2可知,斗杆关节转角q2有:

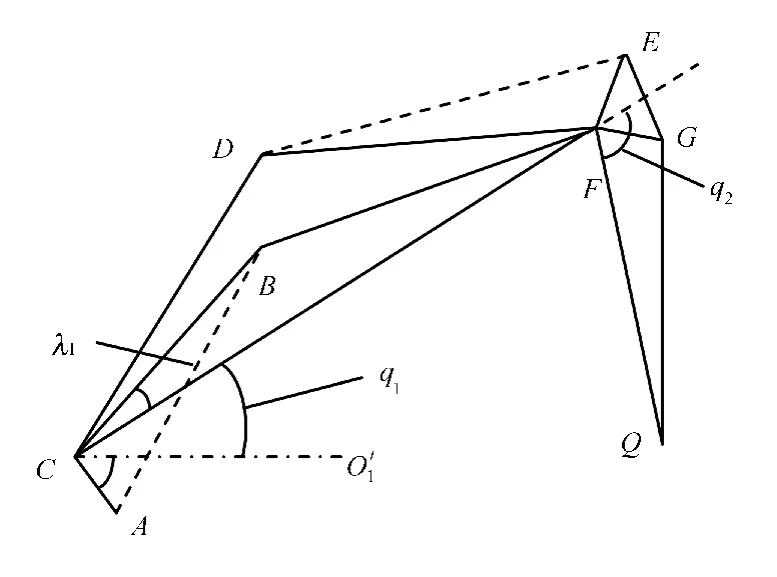
图2 动臂与斗杆机构几何模型
其中∠CFD、∠EFG、∠GFQ为固定值,可以从设计图纸上直接量取。∠DFE为

1.3 铲斗关节转角计算
铲斗油缸行程发生变化时,会带动四连杆机构NQKH,铲斗固结连杆机构的其中一根杆上,因此铲斗关节转角的计算比较复杂。铲斗油缸关节模型简图如图3所示。

图3 铲斗关节局部机构几何模型简图
铲斗油缸行程变化联动四连杆机构,造成铲斗固结连杆机构的KQ杆发生运动,铲斗关节转角的计算如下:
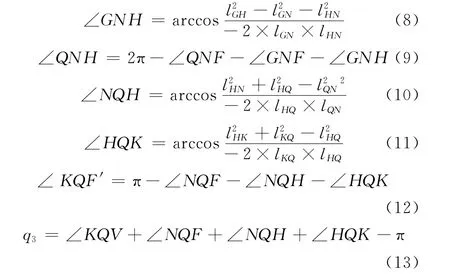
其中∠NQF、∠KQV、∠GNF、lGN、lFN、lGF、lFQ、lHN、lQN、lHK、lKQ为设计常量值,铲斗油缸长度为变量lGH, lNK和lHQ为联动变量。
2 检测系统设计
根据以上的理论建模,结合现有实验条件,设计的位姿检测系统包含以下3个环节:
(1)采用线性位移传感器直接测量液压缸行程;
(2)利用单片机完成数据采集;
(3)利用Lab VIEW完成数据处理、保存及回放等。
2.1 传感器选择和模拟
在实际测量中,传感器可以采用滑块位移传感器。通过紧固装置将其分别安装在动臂油缸、斗杆油缸、铲斗油缸上。具体安装时,将传感器采用固定装置分别安装在液压缸壳体上,拉杆安装在液压缸光杆上,实现液压缸光杆与传感器拉杆的同步位移,进而完成液压缸行程的测量。滑块位移传感器将线位移数据转换成0~5 V模拟电压,并输入测量系统。
在实验室设计与调试时,输入信号是由单片机提供的0~5 V可调电压代替线性位移传感器的输入电压来完成数据采集与处理程序的编写与调试。
2.2 数据采集及处理系统设计
数据采集系统主要完成数据的采集与上传。采用两级控制并分别完成数据的采集和上传。下位机有单片机PCF8591组成的数据采集系统,负责数据的采集;上位机是由Lab VIEW开发,负责数据的接收和显示。整套数据采集系统实物图见图4。
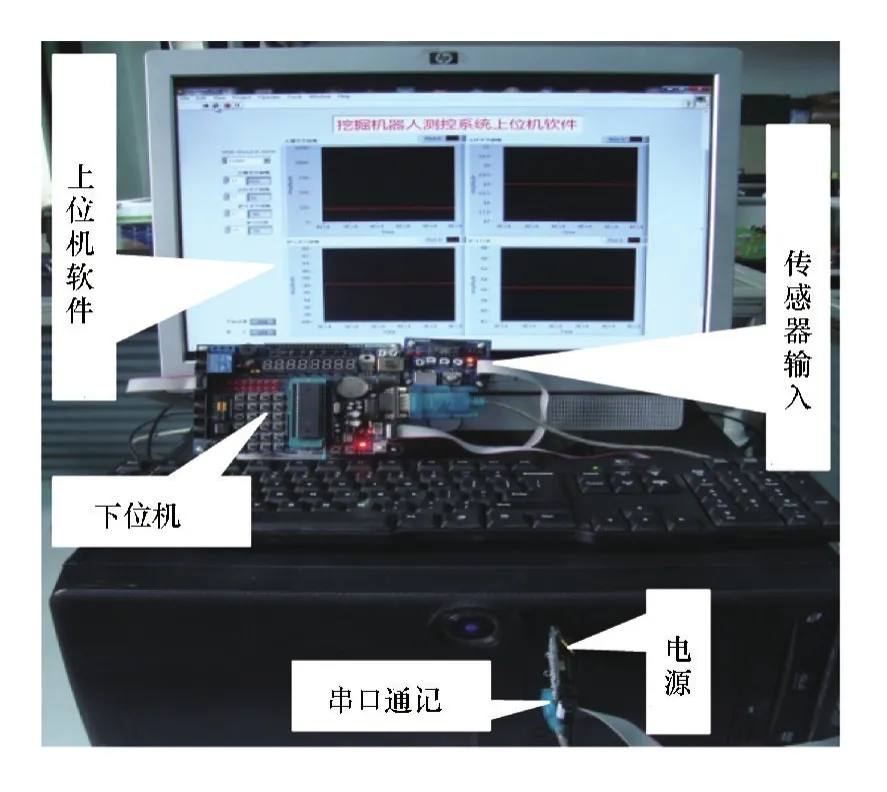
图4 数据采集系统实物图
2.2.1 下位机设计
下位机负责数据的采集任务。线性位移传感器输出0~5 V的模拟电压,采用4路8位逐次逼近式AD转换器PCF8591对此模拟电压进行模数转换。其中3路进行3个液压缸数据采集,预留出第4通道作为挖掘机回转机构的转角测量。
PCF8591采集到的数据采用I2C总线串行输入/输出,但是所选用的单片机并没有预留的I2C接口,因此要完成单片机与PCF8591的通信,需要编写I2C协议。设计时将单片机2个管脚P1.2、P1.3分别作为模拟SCL、SDA接口连接在PCF8591的SCL、SDA端口上,采用I2C协议呼叫应答机制循环读取PCF8591的转换结果。
2.2.2 上位机设计
利用单片机和Lab VIEW联合开发平台完成数据处理、保存及回放等功能的设计,实现挖掘工作装置的各关节转角数据的实时显示,并以Excel格式文件保存在由Lab VIEW编写的上位机软件中。
具体设计:模数转换后,单片机读取PCF8591的转换结果,得到一个8位二进制数据,并将该数据通过串行口传输到上位机中,由上位机完成二进制到十进制转换,用于对液压缸行程的具体计算。因为传感器输出为0~5V的模拟电压,PCF8591AD转换器输出0~255的二进制数据,而被测液压缸实际行程是0~1 250 mm,所以在Lab VIEW中编写相关程序将转换得来的8位的二进制的数据转换成0~255的十进制数据,再由0~255所对应的0~1 250 mm行程计算液压缸的行程。
3 检测系统仿真
系统仿真时,数据采集指令由Lab VIEW向单片机发出,并对单片机所采集到的数据进行显示和保存。单片机通过串口与Lab VIEW通信。串口的具体设置:波特率57 600,8位数据位,1位停止位,0个校验位。上位机每隔612 ms向单片机发送数据采集指令,单片机循环读取PCF8591转换结果,将转换结果通过串口发送到上位机。上位机读取缓冲区的数据字节数m,将m赋给VISA READ,通过VISA READ读出缓冲区中数据,输出为字符型数据。采用Lab VIEW中String To Byte Array Function将这m字节的字符转换为十进制的0~255数据,利用Decimate 1D array将混杂在1 000个4个通道的数据分别送到4个数组中,进而实现四通道数据分离。将分离出的数据送到Wave Form Chart中用以实时显示挖掘机关节转角的变化过程。完成相关参数设置后,点击运行,得到的液压缸驱动的挖掘机工作装置的关节转角见图5。
需要说明的是:由于在实验室环境下采用的传感器输入为单片机模拟的,模拟电压是由人工单次调整的,而单次调整后每一个模拟值为一固定值,所以造成图5中的各个关节及其铲斗位姿是单一值,且显示为一条直线。若真实传感器提供变化的0~5 V连续变化的模拟电压时,则图中将显示连续的变化曲线。
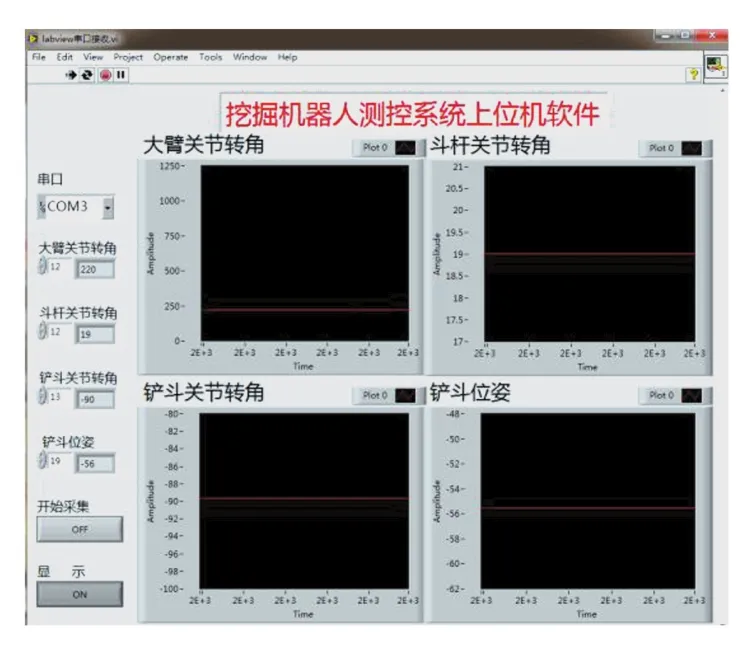
图5 关节转角测量结果显示界面
4 结束语
由于硬件条件限制,本次设计的位姿检测系统暂时采用了串口通信,如果实验条件允许采用高性能的数据采集系统,则可以显著提高通信速率,进而提高数据采集的实时性。本设计主要是针对采用液压传动辅助位姿变换的各种机构,提出一种轨迹跟踪的实现方法,该方法转变了直接进行关节转角检测的思路,转换成更为可靠且可行性更高的线位移测试方法。这种设计思路的转换,对诸多液压传动机构的位姿检测系统的设计具有借鉴意义。
References)
[1]巩明德,田博.遥操纵多自由度电液伺服并联机械手力反馈控制策略[J].吉林大学学报:工学版,2012(增刊1):62-66.
[2]王福斌,刘杰,陈至坤,等.基于模糊聚类判别的挖掘机器人行为控制[J].东北大学学报:自然科学版,2011,32(12):1745-1748,1769.
[3]王福斌,刘杰,焦春旺,等.基于ANFIS的挖掘机器人挖掘轨迹仿真[J].东北大学学报:自然科学版,2011,32(4):554-559.
[4]任志责,陈进,贺康生,等.基于运动学分析的挖掘机器人轨迹规划新方法[J].中国工程机械学报,2012,10(2):150-155.
[5]刘阔,刘杰,杨克石,等.挖掘机器人的模型与自适应模糊滑模控制[J].中国工程机械学报,2009,7(1):1-6.
[6]贺继林,赵鑫,张大庆,等.新型智能挖掘机自动轨迹控制研究[J].广西大学学报:自然科学报,2012,37(2):259-265.
[7]LeDuc Hanh,Kyoung Kwan A H N,Nguyen Bao Kha,et al.Trajectory control of electro-hydraulic excavator using fuzzy self tuning algorithm with neural network[J].Journal of Mechanical Science and Technology,2009,23:149-160.
[8]Bradley D A,Seward D W.The Development,control and operation of an autonomous robotic excavator[J].Journal of Intelligent and Robotic Systems,1998,21:73-97.
[9]Liu Yang,Hasan Mohammad-shahidu,Yu Hongnian.Modelling and remote control of an excavator[J].International Journal of Automation and Computing,2010,7(3):349-358.
[10]刘强,冯培恩,潘双夏.基于速率观测器的挖掘机器人时延鲁棒控制研究[J].中国工程机械学报,2008,6(3):276-281.
[11]黄宗升,秦石乔,王省书.光栅角编码器误差分析及用激光陀螺标校的研究[J].仪器仪表学报,2007,28(10):1866-1869.
[12]吕宪勇.挖掘机工装轨迹控制系统设计及实验研究[D].哈尔滨:哈尔滨工业大学,2011.
Study on position and orientation measurement for a hydraulic transmission mechanism
Li Haihong,Xie Jinglin,Zou Jiuli,Zhang Xueliang
(College of Mechanical Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China)
Trajectory tracking is necessary to servo control for many mechanisms which shift pose by hydraulic transmission mechanism.The aim of this research is to find how to detect the pose accurately for trajectory tracking.Based on the kinematic analysis,a novel method is presented to measure hydraulic cylinder displacement but angular displacement of joints by analyzing the shortcoming of measuring angular displacement directly.Taking an excavator’s working device as the example,a transformation model from the angular displacement of joints to journey of hydraulic cylinder is built.A prototype is developed for data acquisition and processing by using the SCM and Lab VIEW,which could show and save the real-time angular displacement of joints.
hydraulic transmission mechanism;trajectory tracking;position and orientation measurement; journey detection of hydraulic cylinder;data acquisition
TH137.3
A
1002-4956(2015)4-0033-03
2014-09-17修改日期:2014-11-20
山西省青年科技研究基金项目(2010021021-2);太原科技大学教育教学改革研究项目(2014-13)
李海虹(1978—),女,山西太原,博士,副教授,硕士研究生导师,研究方向为机械制造及其自动化专业、机构动力学及测控技术.
E-mail:lihaihongty@sina.com