六足仿生机器人腿部动力学分析与控制
2015-07-07于常娟张明路金玉阳
于常娟,张明路,金玉阳
(1.河北工业大学机械工程学院,天津 300130;2.廊坊师范学院数学与信息科学学院,河北廊坊 065000)
六足仿生机器人腿部动力学分析与控制
于常娟1,2,张明路1,金玉阳1
(1.河北工业大学机械工程学院,天津 300130;2.廊坊师范学院数学与信息科学学院,河北廊坊 065000)
为了实现六足仿生机器人的多种运动模式,提高不同路况环境的适应能力,提出了一种带有变形关节的新型腿部结构.采用拉格朗日方法建立了用于控制机器人腿部的动力学模型,设计了计算力矩+RBF神经网络复合控制器,其中计算力矩是已建模的部分,神经网络补偿动力学模型中未建模部分、结构参数的测量误差以及外部扰动.采用MATLAB对腿部的轨迹跟踪控制进行仿真,结果表明了该控制器跟踪精度更高,具有优良控制性能.
仿生机器人;新型腿部结构;动力学;计算力矩控制;神经网络
0 引言
近年来,自然界中的动物运动方式极大地激发了人们研究仿生机器人的灵感,各式各样的仿生机器人也应运而生.例如六足仿壁虎机器人[1],八足仿生蟹机器人[2].BigDog四足机器人[3].其中四足机器人具有运动速度快、灵活性高的优势.与四足机器人相比六足机器人具有稳定性更高、运动速度适中、承载和攀爬能力更强的优势,可应用于星际探测、复杂地形的减灾救援、海底作业、野外侦查及军事等方面.德国宇航中心研制了小型六足机器人DLR-Crawler,能够置于大型探测设备内,在大型探测器无法到达的地域内执行采样和探测等任务.美国国家航空航天局、斯坦福大学与加州理工大学喷气推进实验室共同研制了全地形六足地外探测器ATHLETE,其对复杂地形的适应能力较强.在国内,对六足机器人的研究起步较晚,沈阳自动化研究所研制了CR-02 6000米自治水下机器人,哈尔滨工业大学研制了小型六足机器人HITCR-Ⅰ.因此对六足仿生机器人系统的研究具有重要的理论意义和实际应用价值.本文针对全地形路况下的六足机器人进行分析研究,提出了腿部带有变形关节的新型六足机器人,并进行了腿部动力学分析和控制器设计.
机构动力学分析的主要方法包括:牛顿-欧拉法、拉格朗日法、凯恩法等.其中牛顿-欧拉法需要分析构件间的内力,非完整约束可以融入到受力分析方程中,求解驱动力矩时还需要把内力再消去,分析和计算过程繁琐,适用于结构简单的机构动力学分析.杨玉维等[4]通过牛顿-欧拉方法和拉格朗日方法相结合对该轮式悬架柔性单杆移动机械人进行了动力学分析与建模.凯恩方法不必分析构件间的内力,便于对具有非完整约束的系统和具有多余约束的系统进行动力学分析,计算过程比较简单,但是该方法不够直观.张国伟等[5]利用凯恩方法对并联机器人进行动力学建模.ChifuYang等[6]利用凯恩方法对空间并联机器人进行动力学建模.拉格朗日方法分析过程简单,解得形式封闭,方法易于理解.Chen C Y等[7]利用第一类拉格朗日方法对轮式移动机器人进行动力学分析建模,李欣源等[8]利用拉格朗日方法对柔性双轮平衡机器人进行动力学建模.本文利用拉格朗日方法建立了带有变形关节的腿部动力学模型.并结合计算力矩与RBF神经网络补偿控制器进行复合控制.
1 动力学建模
普通六足仿生机器人腿部具有3个关节,即根关节、髋关节和膝关节,当足端的位置确定后,腿部的姿态也随之确定,不能进行调整,所以腿的灵活性较差.本文提出新型六足仿生机器人具有6条结构相同的腿,又为每条腿多设计了1个变形关节,即具有4个转动关节,当变形关节的角度发生变化时可以改变腿部行走的姿态,从而可以模拟昆虫和哺乳类等动物行走的姿态,具有多模式运动的能力,进一步增强了机器人运动的灵活性并提高了越障能力.
如图1为六足仿生机器人机构简图.6条腿均匀对称分布于机身两侧.每条腿具有4个关节.图2为可变形腿的示意图.
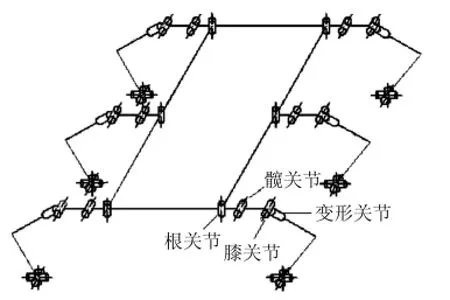
图1 六足仿生机器人机构简图Fig.1The mechanism prototype of hexapod biomimetic robot

图2 可变形腿示意图Fig.2Diagram of leg has a deformable joint
在这里假设机身是静止或匀速直线运动,忽略了机身对摆动腿的作用力,且与地面没有接触,使摆动腿的动力学分析简化.
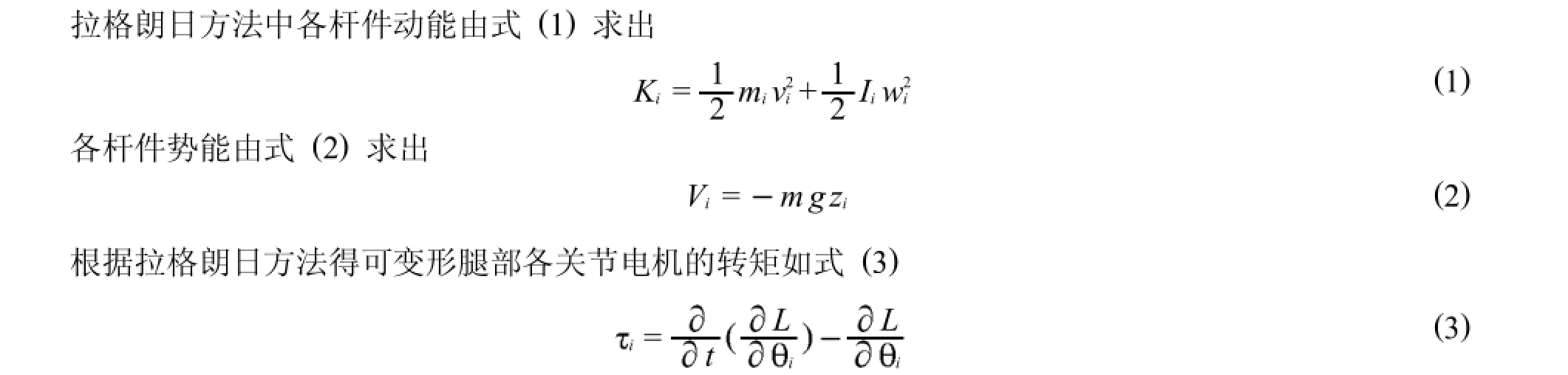
为便于进行控制器设计,把分离成惯性力矩项,向心力矩哥氏力矩项和重力矩项,得逆动力学模型式(4)

式中:为转动关节处的电机驱动力矩,是(1×4)向量;M为4×4阶惯性矩阵,满足对称正定有界性质;C,为向心力和哥氏力矩项,是4×4矩阵;M2C,为斜对称矩阵;G为重力项是(1×4)有界矩阵.这里由于篇幅限制不列出各转动关节处电机驱动力矩的具体值.
2 控制器设计
常用的基本控制方法有计算力矩控制、滑模控制、迭代学习控制和鲁棒控制等,基本控制方法结合神经网络控制和模糊控制等智能方法,可以发挥各控制方法的优势,弥补其不足[9-11].本文采用计算力矩控制与神经网络补偿控制复合控制六足机器人的腿部.计算力矩控制器输出已知模型部分的动力,RBF神经网络逼近模型的不确定部分和外界扰动.
当模型精确已知时,计算力矩控制器


3 仿真
变形关节的作用是改变六足机器人腿部的姿态,即模仿不同昆虫,哺乳动物等运动,当运动模式确定后,变形关节的角度即固定不变,是一个恒定值.
利用MATLAB实现机器人足端跟踪椭圆轨迹仿真,采用5次B样条插值进行关节空间轨迹规划得到转动角位移、角速度和角加速度都连续的关节期望轨迹.
可变形腿构件的几何参数:各杆长度为l1=2cm,l2=20cm,l3=15cm,l4=10cm.质量分别为m1=0.1kg,m1=2 kg,m2=1.5 kg,m3=1 kg.各杆质心距转动轴的距离p1=2 cm,p2=10 cm,p3=7.5 cm,p4=5 cm.
在可达空间中足端轨迹定义为椭圆的上半部分,每步跨度是10 cm,足端抬起的高度是5cm,从足端轨迹中选取若干间隔点,根据逆运动学逆解得到关节空间的对应角位移,利用5次样条插值法得到关节空间的期望轨迹.关节的初始位置设为[0.6,0.5,0.6,0.5],初始速度和初始加速度都设为[0,0,0,0].
网络结构采用输入层8个神经元,输入值为关节转角误差及误差的微分x=e,eT.隐含层5个神经元,即5个高斯基函数,输出层4个神经元,输出值即模型不确定部分的逼近值.
在考虑建模误差和外界扰动情况下计算力矩法单独控制与计算力矩控制+神经网络补偿复合控制该可变形腿的各个关节轨迹跟踪比较如图3,计算力矩控制+神经网络补偿复合控制经过8 s与期望轨迹基本重合,跟踪的误差极小,跟踪性能优良.可见虽然较计算力矩控制法+神经网络补偿复合控制趋近轨迹所用的时间较长但轨迹跟踪精度较高,考虑关节只有初始位置不在期望轨迹上,关节轨迹趋近需要一定时间,但是当实际轨迹趋近到期望轨迹后,以后的迈进过程中,关节会一直保持高精度轨迹跟踪.综合考虑,计算力矩控制+神经网络补偿控制优于计算力矩控制法,能满足实际控制的需要.

图3 计算力矩控制与计算力矩控制+神经网络补偿控制轨迹跟踪效果比较Fig.3Trajectory tracking of computed torque control vs computed torque plus RBF neural network control
4 结论
机构方面提出了一种新型带有变形关节的六足仿生机器人腿部.动力学方面,基于拉格朗日方法建立了腿部的动力学模型.控制方面,采用计算力矩控制器+RBF神经网络补偿控制器.利用MATLAB对腿部进行轨迹跟踪控制仿真,结果表明该控制器较传统控制器的轨迹跟踪误差更小,可用于该六足机器人腿部的轨迹跟踪控制.
致谢
本文得到了廊坊师范学院科学研究项目(LSLB201501)的资助.
[1]DonghoonSon,DongsuJeon,WooChulNam,etal.Gait planningbasedonkinematicsforaquadrupedgeckomodelwithredundancy[J].Robotics and Autonomous Systems,2010,58(5):648-656.
[2]ChenXi,WangLi-quan,YeXiu-fen,et al.Prototypedevelopmentandgaitplanningofbiologicallyinspiredmulti-leggedcrablikerobot[J].Mechatronics,2013,23(4):429-444.
[3]丁良宏,王润孝,冯华山,等.浅析BigDog四足机器人[J].中国机械工程,2012,23(5):504-514.
[4]杨玉维,张明路.6自由度轮式悬架柔性单杆移动机械手动力学研究与仿真[J].机械设计,2009,26(10):43-46.
[5]张国伟,宋伟刚.并联机器人动力学问题的Kane方法[J].系统仿真学报,2004,16(7):1386-1391.
[6]Yang Chifu,Zheng Shutao,Lan Xinjie,et al.Adaptive robust control for spatial hydraulic parallel industrial robot[J].Procedia Engineering,2011,15(1):331-335.
[7]Chen C Y,Li TH S,Yeh Y C,et al.Design and implementation of an adaptive sliding-mode dynamic controller for wheeled mobile robots[J].Mechatronics,2009,19(2):156-166.
[8]李欣源,阮晓钢,任红格.柔性双轮平衡机器人的动力学建模与分析[J].机器人,2010,32(1):138-144.
[9]Zhu Zhenqi,Li Jinsong,Gan Zhongxue,et al.Kinematic and dynamic modelling for real-time control of Tau parallel robot[J].Mechanism and Machine Theory,2005,40(9):1051-1067.
[10]Torres S,Me'ndez J A,Acosta L,et al.On improving the performance in robust controllers for robot manipulators with parametric disturbances [J].Control Engineering Practice,2007,15(5):557-566.
[11]陈维,王耀南,许海霞.一类不确定系统的神经网络L2--增益鲁棒控制[J].控制理论与应用,2010,27(6):745-752.
[12]Zuo Yi,Wang Yaonan,Liu Xinzhi,et al.Neural network robust tracking control strategy for robot manipulators[J].Applied Mathematical Modelling,2010,34(7):1823-1838.
[13]刘金琨.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社,2008:41-45.
[责任编辑 田丰夏红梅]
Dynamics analysis and control of the legs of hexapod biomimetic robot
YU Changjuan1,2,ZHANG Mingli1,JIN Yuyang1
(1.School of Mechanical Engineering,Hebei University of Technology,Tianjin 300130,China;2.College of Mathematics and Information,Langfang Teachers University,Hebei Langfang 065000,China)
A new leg structure with a deformable join was presented,so that the hexapod biomimetic robot can achieve multiple motion modes and improve adaptability to environment.By langrange method the dynamics model of the robot legs was obtained.Based on the computed torque and the RBF neural network,the hybrid controller was designed.The computed torque was made of the modeled part.The RBF neural network was used to compensate the unmodeled part, the measure error of the structure parameters and the external disturbance.Simulation results by MATLAB show that the tracking precision of the controller is higher and its control performance is superior.
biomimetic robot;new leg structure;dynamics;computed torque control;neural network
TP273
A
1007-2373(2015)05-0028-05
10.14081/j.cnki.hgdxb.2015.05.006
2014-11-03
国家自然科学基金(61473113);国家863计划项目(2011AA040201)
于常娟(1976-),女(汉族),讲师,博士生.
数字出版日期:2015-10-19数字出版网址:http://www.cnki.net/kcms/detail/13.1208.T.20151019.1023.008.html
