基于灰度共生矩阵纹理特征的车型识别系统*
2015-07-07程丽霞徐迎晖
程丽霞 徐迎晖
(广东工业大学自动化学院)
基于灰度共生矩阵纹理特征的车型识别系统*
程丽霞 徐迎晖
(广东工业大学自动化学院)
针对车型识别技术在智能交通管理中存在的问题,提出基于灰度共生矩阵纹理特征的车型识别系统。该系统由车辆图像采集及预处理、车脸分割、纹理特征提取、最小距离分类器等组成。经过实验,该车型识别系统的准确率达到90%。
车型识别;灰度共生矩阵;纹理特征;最小距离分类器
0 引言
公路收费站根据车辆的类型收取相应的费用,采用自动车型识别系统可大大降低人工识别车型的工作量。学者们在智能车型识别系统领域提出了很多方法。文献[1]和文献[2]采用支持向量机分类车型,该方法以提取车辆侧面图像的特征作为研究对象,不同类型车辆的细节信息不能被提取出,无法精确识别车型。文献[3]采用背景差分法提取目标车辆的Harris角点,计算待识别车辆与标准样本Harris角点的Hausdorff距离,选择距离最短的为识别结果,该方法虽然只需研究车辆的某些特殊点,但对噪声没有良好的鲁棒性。文献[4]以车脸图像灰度共生矩阵的纹理特征量作为标准样本,计算待识别车辆的纹理特征量与标准样本的欧氏距离,选择距离最短的为识别结果,该方法克服了文献[1]~文献[3]的不足。但文献[4]在图像滤波方面没有给出模板的大小和具体的车脸分割方法,这两步图像处理效果的好坏直接影响后续的车型识别。
本文提出基于灰度共生矩阵(gray level co-occurrence matrix,GLCM)纹理特征的车型识别系统,主要对文献[4]存在的不足加以研究。在图像滤波方面,对高斯滤波、各种参数大小模板的中值滤波进行比较;明确了分割车脸图像的方法。
1 基于灰度共生矩阵纹理特征的车型识别系统
基于灰度共生矩阵纹理特征的车型识别系统由车辆图像采集及预处理、车脸分割、纹理特征提取、最小距离分类器等组成,其结构图如图1所示。

图1 基于灰度共生矩阵纹理特征的车型识别系统结构图
车型识别流程:首先,采集一段在公路上拍摄的监控视频,提取出各帧图像,由于摄像头静止拍摄固定场景,因此在车辆出现期间,背景部分基本无变化,通过背景差分算法可得到车辆图像;然后,对车辆图像中值滤波,利用车辆图像的水平、垂直积分投影方法分割出车脸图像;接着,对各车脸图像进行标准化,建立标准车脸图像库,提取标准车脸图像的纹理特征,建立纹理特征库,用纹理特征库的数据训练最小距离分类器;最后,将待识别的车脸图像的纹理特征量输入最小距离分类器进行识别分类。
2 图像采集及预处理
2.1 图像采集
本文从公路车辆视频中提取各帧图像,选择一张不含运动目标的图像作为参考;然后计算当前帧与参考图像对应像素位置的灰度差值,若差值不为0的像素数目超过设定的阀值则认为图像中存在运动目标,否则没有运动目标,将检测出有运动目标的当前帧作为前景图像加以保存(本文视频的帧速率为13帧/秒);最后将运动目标刚好离开拍摄范围的相连3帧图像的平均图像作为背景图像加以保存。
2.2 图像预处理
2.2.1 图像灰度化
拍摄的图像一般为24位真彩色图像,其图像像素值由R(红)、G(绿)、B(蓝)3种基色组成。图像的数据量较大,使处理图像的时间过长,而且提取目标、中值滤波、分割车脸、生成灰度共生矩阵等操作都在灰度图像上实现。因此,需将存储的前景图像、背景图像灰度化,以便后续图像处理能正常进行。本文采用加权平均法对图像做灰度化处理。

其中: R(i,j)、G(i,j)、B(i,j)分别表示在(i,j)处像素的红分量、绿分量、蓝分量;f(i,j)表示在(i,j)处像素的灰度值。
2.2.2 运动目标提取
背景差分法是获取运动目标的最普遍方法,该方法简单并能完整地提取出运动目标。2幅图像直接相减获得的目标图像

其中,Dt(i,j)是运动目标图像;ft(i,j)是第t帧图像;(i,j)是运动目标刚好离开拍摄范围的相连3帧图像的平均图像。
2幅图像直接相减,若像素差值出现负数则将其灰度值设置为0,其效果如图2所示。
2幅图像绝对相减所获得的目标图像

图像绝对相减获得的运动目标图像如图3所示。
由图2、图3可见,图像直接相减获得的目标图像噪声小,并且车辆与背景分离良好,有利于下一步的车脸分割。

图2 图像直接相减获得的运动目标图像

图3 图像绝对相减获得的运动目标图像
2.2.3 中值滤波
采集图像的质量会受到外界因素干扰,如光照强度、灰尘、空气湿度等。若图像中噪声较大,难以准确确定车脸位置。为降低噪声的影响,采用中值滤波对图像进行处理。实验图像的分辨率为宽320像素×高240像素,通过调节模板参数比较处理结果,采用3×3模板时能获得较好的降噪效果。
3 车脸分割
为减少数据量,提高系统识别速度,本文只研究车脸图像。车脸的具体范围:车辆左右雾灯的外边沿分别作为车脸图像的左右边界;车辆前挡风玻璃的下沿作为车脸图像的上边界;车辆保险杠作为车脸图像的下边界,四边界所围的区域称之为车脸。利用水平、垂直积分投影的方法分割出车脸。由水平积分投影确定车脸图像的上、下边界,垂直积分投影确定车脸图像的左、右边界。目标图像的水平投影如图4所示,垂直投影如图5所示,分割后的车脸图像如图6所示。

图4 水平积分投影图像

图5 垂直积分投影图像

图6 车脸图像
分割后的车脸图像通常大小各异,且明暗程度也存在较大差异,使提取的纹理特征量没有统一的衡量标准。为此,需要将车脸图像缩放成统一大小。经过大量实验,车脸图像大小确定为宽120像素×高50像素。然后对车脸图像进行灰度拉伸、直方图均衡化,使图像的衡量标准统一。经过一系列处理得到的标准车脸图像如图7所示。按照上述方法,将样本图像全部标准化,建立标准车脸图像库。

图7 标准车脸图像
4 纹理特征
4.1 灰度共生矩阵
纹理反映图像的内部结构信息,表示在图像中某方向θ上相距为d的两像素存在着特定的关系。灰度共生矩阵是一种基于像素间的特定关系来描述纹理的方法。GLCM的每个元素[P(i,j)]表示在θ方向上,相距d的2个灰度级分别为i和j的像素出现的概率或次数。若图像灰度级为L,则灰度级i,j=0,1,2,…,L-1。θ一般取0°、45°、90°和135°;d一般取1、2、3等。
4.2 提取纹理特征
本文选择GLCM 5个常见非线性相关的纹理特征作为研究对象:energy(能量)、contrast(对比度)、entropy(熵)、relativity(相关)、local stationarity(局部平稳性)。
1) energy:是GLCM元素值的平方和,亦称为能量。能量越大,纹理就越粗;反之,纹理就越细。

其中,f1表示图像纹理的粗细程度;p(i,j)表示像素值分别为i和j的2个像素出现的次数或概率;L表示图像的灰度级数。
2) contrast:反映图像的清晰度和纹理沟纹深浅的程度。对比度值越大意味着图像的清晰度越高,纹理的沟纹越深;反之,纹理的沟纹越浅。

其中:f2表示图像的对比度;n=|i-j|。
3) entropy:是图像所具有的信息量的度量。纹理信息也属于图像的信息。熵表示纹理的非均匀程度或复杂程度。熵越大意味着纹理越复杂。其中:f3表示图像具有的信息量。

4) relativity:反映GLCM的元素在横向或纵向上的相似程度。

5) local stationarity:度量图像纹理局部变化的多少。其值越大,表示局部越均匀;反之,局部变化不均匀。

其中f5表示局部图像纹理变化的大小。
5 车型识别
本文用最小距离分类器识别车型。最小距离分类器的原理[4]:任何一个模式类在特征空间中都处于较为聚集的状态,将同类型样本特征量的平均值作为该模式类的中心;计算待识别样本的特征量与每类模式中心的欧式距离;选择距离最短的模式类作为该样本的分类结果。
本文基于灰度共生矩阵纹理特征的车型识别系统对小轿车、SUV、面包车、大客车、小货车、大货车等车型进行了实验,品牌包括大众、丰田、雪佛兰等。以图8实验车脸图像为例,本文设定图像的灰度等级L为256,GLCM的大小为8×8,像元距离d为1。计算4个方向(0°,45°,90°,135°)上的GLCM,其中1个GLCM为
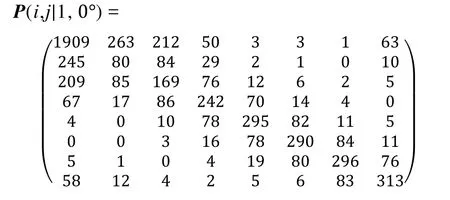
灰度共生矩阵P(i,j|1, 0°)的纹理特征值能量为4406974、对比度为12502、熵为34561.6569、相关为1909、局部平稳性为1632.2393。将这5个特征值按顺序分别作为元素组成一个列向量。按照上述方法,在所建立的标准车脸图像库中,分别提取每幅图像的纹理特征,建立纹理特征库。

图8 实验车脸图像
将待识别样本的纹理特征向量与纹理特征库中每类车型的平均纹理特征向量进行距离计算,选择距离最短的为识别结果。3个品牌车的实验结果见表1。
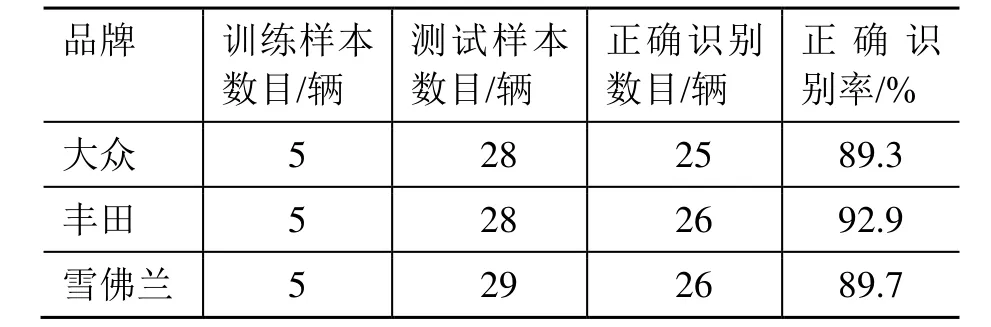
表1 实验结果
6 实验
本文实验系统开发平台为 Microsoft Windows7操作系统,前端开发工具采用VS2010,图像处理中应用OpenCV函数包。实验中,在公路上拍摄了100幅车辆的正面序列图像,将图像进行处理。在标准车脸图像库中选取15幅车脸图像作为训练样本,85幅车脸图像作为测试样本,正确识别的车型有77幅,识别率达到90%。
7 结论
本文提出的基于灰度共生矩阵纹理特征的车型识别系统稳定、正确识别率高、实时性好,但适用范围窄,例如光照强度等因素严重影响准确度。若光线强烈,车辆的颜色较暗时,前景图像中车辆所在的区域会比背景图像暗,用前景图像减去背景图像所得到的车辆图像不完整,提取的纹理特征量就不能准确地代表该车型,致使识别结果不准确。因此后续还需进一步研究去光照的算法。
[1] 王慧斌,芦蓉.基于视频的车型特征提取及识别方法研究[J].微型电脑应用,2010,26(10):50-53.
[2] 冯超,贺俊吉,史立.基于支持向量机的轿车车型识别[J].上海海事大学学报,2011,32(3):85-89.
[3] 周爱军,杜宇人.基于视频图像 Harris角点检测的车型识别[J] 扬州大学学报:自然科学版,2008,11(1):67-70.
[4] 马蓓,张乐.基于纹理特征的汽车车型识别[J].电子科技,2010,23(2):94-97.
Vehicle Type Recognition System Based on the Texture Featur of Gray Level Co-Occurrence Matrix
Cheng Lixia Xu Yinghui
(School of Automation, Guangdong University of Technology)
The technique of vehicle recognition system still has problem in the intelligent traffic management, this paper gives a vehicle recognition system based on gray level co-occurrence matrix texture features. The system consists of vehicle image acquisition and preprocessing, car face segmentation, texture feature extraction, the minimum distance classifier etc. The accuracy rate of the vehicle type recognition system achieves to 90% by the experiment.
Vehicle Type Recognition; Gray Level Co-Occurrence Matrix; Texture Feature; Minimum Distance Classifier
程丽霞,女,1990年生,在校硕士研究生,研究方向:数字图像处理、车型识别、嵌入式系统。E-mail: 785338465@qq.com
国家自然科学基金项目(61102034);广东省工业高新技术领域科技计划项目(2013B010401028)资助。
徐迎晖,男,1977年生,博士,副教授,硕士研究生导师,研究方向:信息安全、车型识别、嵌入式系统、多媒体信号处理等。
