云底高度的地基毫米波云雷达观测及其对比
2015-07-05唐英杰马舒庆李思腾谢成华唐凡洁
唐英杰 马舒庆 杨 玲 陶 法 李思腾 谢成华 唐凡洁
1)(成都信息工程大学电子工程学院,成都 610225)2)(中国气象局气象探测中心,北京 100081)
云底高度的地基毫米波云雷达观测及其对比
唐英杰1)马舒庆2)*杨 玲1)陶 法2)李思腾1)谢成华1)唐凡洁1)
1)(成都信息工程大学电子工程学院,成都 610225)2)(中国气象局气象探测中心,北京 100081)
对2014年11月20日—12月31日中国气象局大气探测综合试验基地Ka波段毫米波云雷达、Vaisala CL51激光云高仪、L波段高空探测系统观测的云底高度进行对比分析。结果表明:在低能见度条件下,毫米波云雷达对云的探测能力明显优于激光云高仪,随着能见度的增加,两设备云探测能力差距在减小;毫米波云雷达与激光云高仪同时观测到有云时,二者观测的云底高度相关系数为0.92;毫米波云雷达与探空观测云底、云顶高度的相关系数分别为0.93和0.78;云雷达观测的云底高度均略低于激光云高仪和探空,云雷达观测的云顶高度略高于探空。
毫米波云雷达; 激光云高仪; L波段高空探测系统; 云底高度
引 言
云或云系是一种常见的天气现象,由湿润的大气在上升运动过程中绝热膨胀冷却达到饱和而生成。云通常覆盖地球表面的50%以上,是地球大气辐射收支平衡的主要调节者,是影响地球大气辐射平衡、热量平衡的重要因素[1-2]。当前在大气科学研究和气象业务中(如分析天气、地气辐射平衡、大气相变过程等),云系起关键作用[3-4]。美国地球科学委员会强调对于自然和人类的变化导致的气候变化的不确定性都是由云通过辐射传输和水循坏造成的[5]。云的研究从宏观(云状、云量、云底高度、云的厚度和云的移动速度)到微观(云粒子物理、化学、光学和辐射特性等)十分复杂。在云的宏观参数中,云量和云高是影响地球辐射收支的重要参数[6],其中,云底高低决定了云的分类和降水概率[7],如何准确获取云高、云量信息是目前气象探测领域面临的重要课题。
目前,获取云资料主要通过空基遥感和地基观测两种方式。卫星遥感可获得全球分布、昼夜连续的云观测资料,但其受空间分辨率及云层底部和多层云观测能力的限制,仍不能满足大气科学研究的需要[8]。地基探测云参数有多种方式,如毫米波云雷达、激光云高仪、全天空成像仪、热红外成像仪、探空等。其中,全天空成像仪只能得到全天空云量[9],没有云高信息且仅在白天工作,红外成像仪虽然能够昼夜观测,能够得到云高云量信息,但由于基于气候统计模型被动反演云高,测量误差较大,很难满足业务要求。探空气球能够穿过云层获得整层高精度大气廓线,可用于反演获得云的垂直分布,但其时间分辨率较低。而毫米波云雷达和激光云高仪能够准确获取高时空分辨率的云的水平垂直结构,是非常有效的探测工具。特别是毫米波云雷达,其波长更接近小粒子尺度,利用云粒子对电磁波的散射特性,通过分析云的雷达回波可以了解云的各种特性,云的回波参数可以反映云的宏观和微观结构、云的特性及其变化。在仪器性能的对比研究方面,章文星等[10]对2008年5—12月中美联合利用ARM移动观测设备(AMF)在安徽省寿县进行大气辐射综合观测试验结果进行分析。黄兴友等[11]对4台激光云高仪、2部红外测云仪、1台全天空成像仪以及1部云雷达的观测数据进行对比。为了遴选出满足业务需求的云观测设备,今后还需对这些仪器进行长期的对比试验,比较这些设备测量结果的一致性和在不同天气条件下的探测能力。
针对近年来固态雷达技术的迅速发展及固态毫米波雷达测云能力的不断提高,中国气象局气象探测中心在北京南郊的大气探测综合试验基地进行了多设备云高观测试验。本文对云雷达和云高仪在2014年11月20日—12月31的连续观测数据进行分析,对比两设备在不同能见度条件下数据获取能力及对云底高度的探测结果,并结合北京市观象台探空资料,对比分析云雷达与探空的观测结果。
1 观测设备和资料
1.1 毫米波云雷达
观测试验所使用的云雷达是由中国气象局气象探测中心、西安华腾微波有限责任公司和成都信息工程大学联合研制的Ka波段全固态全相参准连续波多普勒雷达,云雷达具有穿透云层、给出云体整体结构信息的能力[12],是探测云体三维精细结构的重要工具。其波长为8.6 mm,峰值功率为4 W,天线采用垂直顶空瞄准式工作方式,测量高度约为15 km,垂直空间分辨率约为30 m,时间分辨率为1~60 s可调。试验中将云雷达时间分辨率设置为60 s。云雷达以回波功率比仪器噪声大2 dB为阈值。
1.2 激光云高仪
观测试验所使用的云高仪是由芬兰维萨拉公司生产,并通过中国气象局考核的Vaisala CL51,垂直指向,发射激光脉冲信号,重复频率为10 KHz,探测距离约为15 km,垂直空间分辨率约为5 m,时间分辨率为1~60 s可调,试验时固定为60 s。云高仪得到后向散射光强度,根据后向散射光强度提取出云回波底高度等云体信息。具体方法:以后向散射光强度比仪器噪声大2 dB为阈值,大于阈值强度的区域的边界下沿为云底高度。
1.3 L波段高空探测系统
常规探空是由探空气球携带无线电探空器,配以无线电经纬仪或测风雷达[13]。我国业务布网的L波段高空探测系统,是由我国自行设计研发的GFE(L)1型二次测风雷达和GTS1型数字探空仪组成,采用二次测风雷达测距体制,能连续自动测定高空气温、湿度、气压、风向、和风速等气象要素[14]。其中,GTS1型数字探空仪采样周期为1.2 s(其数据也称为探空秒数据),每分钟采样频率约为50次,按照每分钟400 m的上升速度,L波段高空探测仪的空间垂直分辨率为8 m。具有高分辨率和实时采集的能力。这些分布在全国各地探空站的高精度探空数据可实时上传到中国气象局,本文使用北京市观象台(39°48′N,116°28′E,海拔高度为32.3 m)的常规探测资料。
1.4 观测期间天气状况及观测资料获取
本文所用资料包括2014年11月20日—12月31日中国气象局大气探测综合试验基地云雷达与云高仪连续并行观测的资料,北京市观象台探空资料,每日2次,分别为07:15和19:15(北京时,下同)。云雷达、云高仪、探空气球投放点的位置如图1所示,三设备位置相距不超过200 m。根据人工观测以及大气探测综合试验基地地面自动气象站的资料,经统计,2014年11月20日—12月31日的42 d中,晴空为13 d,有云为27 d,其中,出现雾、霾为30 d,出现降水为1 d。本文将从以下4种情况进行对比分析:①4种不同能见度条件下云雷达与云高仪数据获取情况,②云雷达与云高仪同时观测到有云情况下,其低、中、高云云底高度对比,③云雷达与探空所获取的云底、云顶高度对比,并进行实例分析,④北京当地1次降水天气过程中,云雷达与云高仪、探空观测的云底高度对比。

图1 云雷达、云高仪、探空气球投放点位置Fig.1 The position of cloud radar, ceilometer and rawinsonde
2 云雷达与云高仪资料对比
2.1 不同能见度条件下资料获取对比
对观测资料分类统计,云底高度小于2500 m为低云,云底高度大于等于2500 m且小于4500 m为中云,云底高度大于4500 m为高云。本文对比两种仪器数据获取性能方面,定义数据获取率为其中一种仪器观测到有云时间与两种仪器共观测到有云的时间的比值。对云雷达与云高仪连续并行观测的结果进行分析,结果分为4种:一段时间内云高仪和云雷达均观测到有云,一段时间内云雷达观测到有云而云高仪未观测到云,一段时间内云高仪观测到有云而云雷达未观测到云,一段时间内云高仪和云雷达均未观测到有云。以上情况下文简称观测结果1、观测结果2、观测结果3、观测结果4,本文将主要分析观测结果1、观测结果2、观测结果3。
在并行连续观测的42 d中(表1),获取的总有效样本量为53719 min,云雷达获取到有云时间为12319 min,云高仪获取到有云时间为9093 min,两设备获取到的有云时间占总样本量百分比较小,这与北方秋冬季节少云天气现象有关。其中,两设备在观测结果1有云时间为7823 min,观测结果2有云时间为4496 min,观测结果3有云时间为1271 min。云雷达总数据获取率比云高仪高24%。而多层云的数据获取率,云雷达为81%,云高仪为64%,对于云的数据获取能力,云雷达明显高于云高仪。

表1 云雷达与云高仪数据获取能力对比(单位:%)Table 1 The comparison of data acquisition capability between cloud radar and ceilometer(unit:%)
对观测资料进行不同能见度条件下的分类统计,如表1和图2所示,能见度小于1 km时,云雷达的数据获取率明显高于云高仪,因为能见度较小时,一般出现雾、霾天气,空气中存在大量水汽和气溶胶颗粒,对云高仪发射的激光有很强的衰减作用,导致激光很少或无法穿过近地雾、霾层到达云层。这一现象也说明雾、霾天气对于云雷达的数据获取性能影响相对于云高仪要小。而随着能见度的增加,两设备的数据获取率差距在减小,能见度不小于10 km 时,二者的数据获取能力基本相当。

图2 不同能见度条件下云雷达与云高仪的数据获取情况Fig.2 The data acquisition between cloud radar and ceilometer in different visibility conditions
2.2 云底高度观测对比
对2014年11月20日—12月31日云雷达与云高仪连续并行观测结果进行分析,图3为观测期间云雷达和云高仪在观测结果1时的云底高度点聚图。相关系数为0.92,达到0.05显著性水平,说明云雷达和云高仪同时观测到有云时,其探测的云底高度一致性较好。
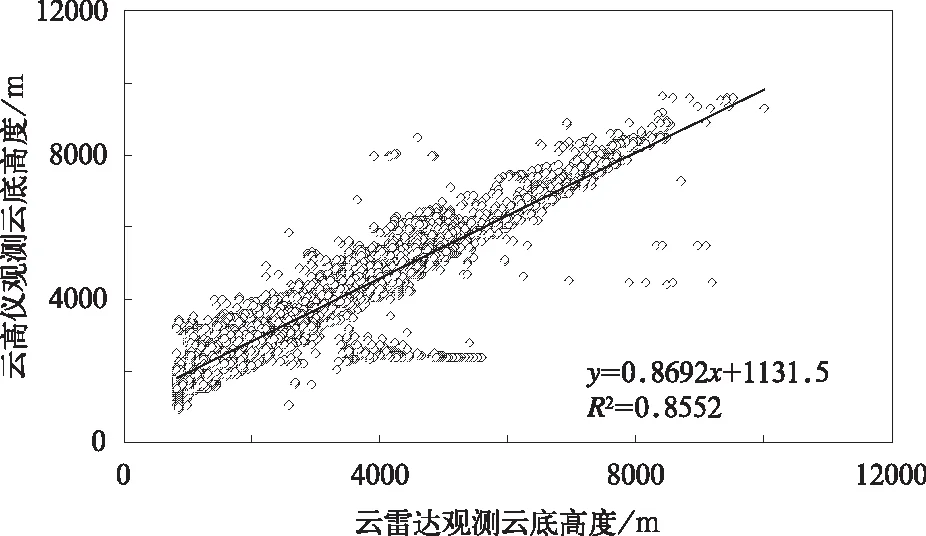
图3 2014年11月20日—12月31日云雷达与云高仪同时观测到有云时云底高度一致性对比Fig.3 Consistency comparison of cloud base height measured by cloud radar and ceilomter from 20 Nov to 31 Dec in 2014
表2为云雷达与云高仪在无降水情况下的低、中、高云平均云底高度对比。在满足观测结果1~3情况下,云雷达观测的低、中、高云平均云底高度与云高仪观测结果最大相差374 m。在观测结果1情况下,云雷达与云高仪分别同时观测到低、中、高云时,云雷达观测的平均云底高度比云高仪观测的结果偏小,最大相差683 m。一般来讲,云体内含水量分布特点是有一含水量最大区,其四周含水量值逐渐递减[3],云高仪发射的激光在受到雾、霾或其他气溶胶粒子衰减后,到达云体的功率变小,激光对云体四周稀薄的空气散射强度不能达到判断云的阈值,而毫米波对此衰减相对较小,因此,造成云雷达观测的平均云底高度比云高仪略偏小。

表2 2014年11月20日—12月31日云雷达与云高仪观测的平均云底高度对比(单位:m)Table 2 The comparison of average cloud base height measured by cloud radar and ceilometer from 20 Nov to 31 Dec in 2014(unit:m)
3 云雷达与探空资料对比
3.1 利用探空资料分析云垂直结构的方法
利用探空资料分析云垂直结构目前主要有3钟方法:温度露点差值法[15]、相对湿度阈值法[16]、温度和相对湿度廓线随高度变化的二阶导数法[17]。周毓荃等[18]对这3种方法进行了比较,并认为直接用相对湿度作为云判断的阈值,比较合理,需考虑3个方面:①不同温度下相对湿度的合理计算,当气温低于0℃时,要按照冰面饱和水汽压计算相对湿度,即利用实际水汽压除以冰面的饱和水汽压得到新的相对湿度;②云层中相对湿度最大值要大于87%,最小值不小于84%;③相对湿度在云顶有负的跳变,在云底有正的跳变。结合以上3个方面,并根据文献[19-20]分析不同温度下云相对湿度阈值的判别方法,以探空第1次观测到云时的高度为云底高度,探空最后1次观测到云时的高度为云顶高度,对北京市观象台2014年11月20日—12月31日42 d共84次的探空资料进行统计。受探空气球运动轨迹不定的影响,为了使云雷达与探空资料在时空上能更好匹配,云雷达取对应当日探空观测到云时刻的10 min平均值,分析对比二者云观测数据。
3.2 云雷达与探空资料对比
根据试验结果统计,云雷达与探空同时观测到云的有效样本量为19,图4为云雷达与探空同时观测到云时的数据对比,在这种情况下,云雷达观测到的平均云底高度为3379 m,探空观测的平均云底高度为3399 m,二者相差20 m,而云雷达探测到的平均云顶高度为6999 m,探空观测的平均云顶高度为7072 m,二者相差73 m。云雷达观测的平均云底高度和平均云顶高度均小于探空的观测结果,这可能是探空仪器性能的滞后效应引起的。而云雷达与探空观测云底、云顶高度的相关系数分别为0.94和0.77,达到0.05显著性水平。可见,云雷达与探空观测云底高度的一致性较好,而受探空气球运动轨迹影响,云雷达与探空在云顶高度的观测一致性上不及云底高度观测结果。由于探空设备中所使用的传感器存在一定滞后性,因此,探空资料观测的云底高度略低于云雷达,而云高仪发射的激光易被下层雾、霾和气溶胶粒子等所衰减,云雷达观测的云底高度同探空观测结果更为接近,云高仪观测结果略高于二者。

图4 云雷达与探空同时观测到有云时,云底高度(a)和云顶高度(b)对比Fig.4 The comparison of cloud base height(a) and cloud top height(b) observed by cloud radar and rawinsonde
3.3 实例分析
图5为2014年12月6日19:00—20:00和11月27日19:00—20:00云雷达与探空观测云垂直结构实例分析对比。如图5a所示,云雷达观测到高度在2460~7680 m的单层云,这与5b图中探空观测2583~8512 m单层云相对应。如图5c所示,11月27日19:00—20:00云雷达发射的电磁波穿过高度在1068~6278 m的第1层云,观测到其上空高度为8422~8978 m、反射率因子为-23 dBZ的卷云,分别对应图5c中厚度约为5215 m和674 m的两层云。可以看出,云雷达发射的电磁波,可以穿过较厚的低云,而获得其上空更高的云层,反射率因子更能直观地反映云体的垂直结构,并与探空结果保持较好的一致性。

图5 2014年12月6日19:00—20:00和11月27日19:00—20:00云雷达与探空观测云实例对比(a)2014年12月6日云雷达获取的云反射率因子,(b)2014年12月6日探空获取的温度和相对湿度变化,(c)2014年11月27日云雷达获取的云反射率因子,(d)2014年11月27日探空获取的温度和相对湿度变化Fig.5 Cloud observed by cloud radar and ceilometer from 1900 BT to 2000 BT on 27 Nov and 6 Dec in 2014(a)the reflectivity of cloud observed by cloud radar on 6 Dec 2014,(b)the temperature and relative humidity observed by rawinsonde on 6 Dec 2014,(c)the reflectivity of cloud observed by cloud radar on 27 Nov 2014,(d)the temperature and relative humidity observed by rawinsonde on 27 Nov 2014
4 一次有降水天气过程云底高度的对比
图6是2014年11月28日20:00—11月30日20:00一次降水天气过程情况,其中,图6a是云雷达观测到的降水天气过程反射率因子,由图6a可清晰地看到整个天气过程云体的结构变化。图6b是云雷达与云高仪在这一时段内观测到的云底高度。根据试验基地地面自动气象站每分钟降水订正数据,在11月29日18:00—18:20有短时降水,图6a、图6b中虚线框内部分为对应降水时段。由于常规探空资料每日仅两次数据,图6a、图6b中椭圆实线框内部分代表这次天气过程中获得4次探空数据时段内云雷达获取的反射率因子。根据地面自动气象站能见度和相对湿度资料显示,图6b中在样本量低于2000时,近地面相对湿度大于85%,能见度低于2 km,有浓雾或较厚的水汽层,这与图6a中实线框内表示的近地面有一层较厚、反射率因子较大的部分相对应。再由图6b中云雷达与云高仪观测的云底高度可知,样本量低于2000,云高仪受雾或水汽层影响,较少或无法探测到其上空的云信息,而样本量超过2000后,随着能见度的增加和相对湿度的减小,云高仪较好地观测到了其上空的云信息,观测的低、中云云底高度略高于云雷达。图6a方框部分显示,在降水发生时,云雷达较完整的观测到云和降水回波,而云高仪发射的激光由于受雨滴等衰减,少量或无法获取其上空云信息。表4为该次降水天气过程中,云雷达、云高仪、探空系统所测云底、云顶高度(云高仪不能获取云顶高度)。11月30日19:00—20:00降水过程已结束,天气晴朗无云,3个设备均未获取数据;受浓雾和近地面水汽层的影响,云高仪在11月29日07:00—08:00和11月29日19:00—20:00均未观测到云数据;探空受探空气球运动轨迹影响,在11月29日07:00—08:00未观测到云数据;云雷达在11月29日07:00—08:00和11月29日19:00—20:00均观测到云数据;11月30日07:00—08:00 3个设备均探测到云数据,云高仪和探空所测云底高度均高于云雷达,这与上文结论一致。

图6 2014年11月28日—11月30日一次降水天气过程(a)云雷达观测到的反射率因子,(b)云雷达与云高仪观测到的云底高度Fig.6 A precipitation weather process from 28 Nov to 30 Nov in 2014 (a)the reflectivity observed by cloud radar, (b)the cloud base height observed by cloud radar and ceilometer

时间云底高度云雷达云高仪探空云顶高度云雷达探空29T07:00—08:008155924029T19:00—20:00102011508780879430T07:00—08:001170186016595850596330T19:00—20:00
5 小 结
本文对2014年11月20日—12月31日云高仪、云雷达和探空的云数据进行分析,得出以下主要结论:
1) 在雾、霾及低能见度天气中,云雷达的数据获取能力明显强于云高仪,随着能见度的增加,两设备的数据获取率差距减小。在观测非降雨云且在观测结果1情况下,云雷达与云高仪观测的低、中、高云云底高度结果一致性较好,但云高仪观测的云底高度略高于云雷达。
2) 在2014年11月28—30日降水天气过程中,云雷达相对于云高仪能较好地观测到降水前后云底高度和云厚度的变化,且从云雷达的回波图上可清楚地看到云的形成与消散的整个过程以及云体结构变化,但不能准确区分降水时云底位置。
3) 探空资料分析云结构同云雷达观测结果对比,其吻合程度,受探空气球运动路径与云雷达探测方向的空间匹配程度的影响。试验中云雷达与探空观测云底高度和云顶高度的一致性较好,受探空仪器的滞后效应等影响,云雷达观测的云底高度略低于探空,而云顶高度略高于探空。
毫米波云雷达发射的电磁波,受雾、霾等气溶胶粒子影响较小,能穿透云层,获得更多的云体内部物理结构信息,且具有较好的多普勒速度分辨能力,但在降水发生时,无法准确区分云底。探空气球能够穿过云层获得整层高精度大气廓线,可用于反演获得云的垂直分布,但其时间分辨率较低。激光云高仪能获得较为准确的云底高度信息,但受雾、霾等特殊天气影响较大。将毫米波云雷达与其他遥感设备相结合,综合利用各仪器的优点进行联合观测,可以更好地研究大气演变规律。通过进一步发展,今后将具有重要的推广应用价值。
[1] 胡树贞,马舒庆,陶法,等.基于红外实时阈值的全天空云观测.应用气象学报,2013,24(2):179-188.
[2] 汪宏七,赵高祥.云物理特性对云光学和云辐射性质的影响.应用气象学报,1996,7(1):36-44.
[3] 盛裴轩,毛节泰,李建国,等.大气物理.北京:气象出版社,2003:444-445.
[4] 屈右铭,蔡荣辉,朱立娟,等.云分析系统在台风莫拉菲数值模拟中的应用.应用气象学报,2012,23(5):551-561.
[5] 仲凌志,刘黎平,葛润生,等.毫米波测云雷达的特点及其研究现状与展望.气象学报,2009,24(4):383-391.
[6] Houghton J T,Ding Y,Griggs D J,et al.Climate Change 2001.The Scientific Basis.Cambridge:Cambridge University Press,2001.
[7] Liou K N.大气辐射导论.郭彩丽,周诗建,译.北京:气象出版社,2004:122-127.
[8] 胡树贞,马舒庆,陶法,等.地基双波段测云系统及其对比试验.应用气象学报,2012,23(4):441-450.
[9] 高太长,刘磊,赵世军,等.全天空测云技术现状及进展.应用气象学报,2010,21(1):101-108.
[10] 章文星,吕达仁.地基热红外云高观测与云雷达及激光云高仪的相互对比.大气科学,2012,36(4):657-672.
[11] 黄兴友,夏俊荣,卜令兵,等.云底高度的激光云高仪、红外测云仪以及云雷达观测对比分析.量子电子学报,2013,30(1):73-78.
[12] 彭亮.ARM云雷达及其他相关仪器观测资料综合分析研究.北京:中国科学院研究生院,2009.
[13] 刘红亚,薛纪善,沈桐立,等.探空气球漂移及其对数值预报影响的研究.应用气象学报,2005,16(4):518-525.
[14] 李伟,李峰,赵志强,等.L波段气象探测系统建设技术评估报告.北京:气象出版社,2009.
[15] Poore K D,Wang J H,Rossow W B.Clould layer thicknesses from a combination of surface and upper-air observations.JClimate,1995,8(3):550-568.
[16] Wang J H,Rossow W B.Determination of cloud vertical structure from upper-air observations.JAppliedMeteor,1995,34:2243-2258.
[17] Chernykh I V,Eskridge R E.Determination of cloud amount and level from radiosonde soundings.JAppliedMeteor,1996,35:1362-1369.
[18] 周毓荃,欧建军.利用探空数据分析云垂直结构的方法及其应用研究.气象,2010,36(11):50-58.
[19] 蔡淼,欧建军,周毓荃,等.L波段探空判别云区方法的研究.大气科学,2014,38(2):213-222.
[20] 张日伟,严卫,韩丁,等.基于RS92探空资料的云垂直结构判定及其分布研究.遥感技术与应用,2012,27(2):231-236.
Observation and Comparison of Cloud-base Heights by Ground-based Millimeter-wave Cloud Radar
Tang Yingjie1)Ma Shuqing2)Yang Ling1)Tao Fa2)Li Siteng1)Xie Chenghua1)Tang Fanjie1)
1)(CollegeofElectronicEngineering,ChengduUniversityofInformationTechnology,Chengdu610225)2)(MeteorologicalObservationCenterofCMA,Beijing100081)
As cloud automatic observation achieved breakthrough progress, a long-term comparison test on different devices is needed to select the suitable cloud observation equipment for regular operation of China. A Ka-band millimeter-wave (35 GHz) cloud radar (KaCR) and a vaisala laser ceilometer (VCEIL) are installed in Meteorological Observation Center of CMA, and data are compared with L-band rawinsonde observations (LRAOBS) in Beijing Weather Observatory from 20 Nov to 31 Dec in 2014. Among these instruments, the KaCR observes the echo power value and its temporal resolution is from 1 s to 60 s, the VCEIL measures the back scattering intense data with the same temporal resolution of KaCR, and the LRAOBS works twice every day. Data acquisition ratio measured by KaCR and VCEIL under different visibility conditions are compared. A comparison test of cloud base heights and cloud top heights measured by KaCR and VCEIL is also carried out. A comparison test of cloud base height and cloud top height measured by KaCR and LRAOBS and a real example is analyzed. And the cloud base heights and cloud top heights measured by KaCR, VCEIL and LRAOBS during a precipitation process are compared too.
The result indicates that the detection ability of KaCR is better than VCEIL under low visibility condition, and their difference of detection ability reduces with the visibility increasing. The cloud base heights measured by KaCR and VCEIL are well consistent, with the correlation coefficient reaching 0.92. The correlation coefficient of cloud base height between KaCR and LRAOBS is about 0.93, and that between KaCR and LRAOBS is about 0.78. Cloud base height measured by KaCR is slightly lower than that measured by VCEIL and LRAOBS, and cloud top height measured by KaCR is slightly lower than that measured by LRAOBS. KaCR can clearly show the process of cloud formation and dissipation and the structure changes of cloud compared with VCEIL and LRAOBS, but cannot accurately identify the cloud base position when it rains.
millimeter-wave cloud radar; laser ceilometer; L-band rawinsonde observation; cloud base height
10.11898/1001-7313.20150604
公益性行业气象(科研)专项(GYHY201106047)
唐英杰,马舒庆,杨玲,等. 云底高度的地基毫米波云雷达观测及对比. 应用气象学报,2015,26(6):680-687.
2015-03-02收到, 2015-07-15收到再改稿。
* 通信作者, email: msgaoc@cma.gov.cn
