脑-计算机接口技术与应用前景*
2015-07-03贾花萍赵俊龙
贾花萍,赵俊龙
(1.渭南师范学院 数学与信息科学学院,渭南714099;2.渭南市中心医院)
引 言
脑-计算机接口(Brain-Computer Interface,BCI)系统是在人脑和计算机或其他电子设备之间建立的通信系统,将脑电信号(EEG信号)作为系统输入,输出的信号可用于进行如控制光标上下移动、睁眼或闭眼以及控制假肢等操作,也就是人们通常所说的“意念控制系统”。运用这种方法,人们就可以通过“动脑”来让外界知道自己的想法或控制相关设备,而不需要多余的语言或动作[1],这种系统为思维正常但有运动障碍的人提供了与外界交流的机会。在脑-计算机接口系统中,“脑”是指神经系统或者有机生命形式的脑,而并不仅仅指的是“思想”;“计算机”是指任何用于处理或计算的设备,可以是硅芯片或者简单电路。
一般情况下,人们通过运动神经和肌肉组织表达自己的想法,但是残疾人或者有运动障碍的人与外界进行交流则需通过不同的途径。虽然残疾人可以通过假肢得到一定程度的帮助,但是对于有些并不具备任何肌肉活动能力的残疾人,如完全瘫痪的人和肌萎缩性脊髓侧索硬化症(Amyotrophic Lateral Sclerosis,ALS)患者来说,假肢没有任何意义。脑-计算机接口系统是人脑与计算机或者其他电子设备之间建立的直接交流和控制通道[2]。这种新方式让有运动障碍的人能够直接用“思想”控制外部设备,给思维能力正常但身体残疾的人的生活带来了极大的方便。
1 脑-计算机接口技术
简单的说,脑-计算机接口系统就是将人类的思维和计算机结合,即从人脑到计算机之间的一条通信电路。图1是简单(脑-计算机)接口系统结构图,通过实体界面如计算机界面刺激脑组织传递特有的感觉信息,这种刺激编码后经大脑认知,产生特定的目的,通过大脑命令计算机产生相应的行为。如浙江大学2012年12月向世界展示的“脑-计算机”研究成果:一只头上戴着电极帽的猴子,帽子上的电极连在计算机上,通过科研人员的不同指挥,猴子做出了4种不同的手部动作(抓、勾、握、捏)。
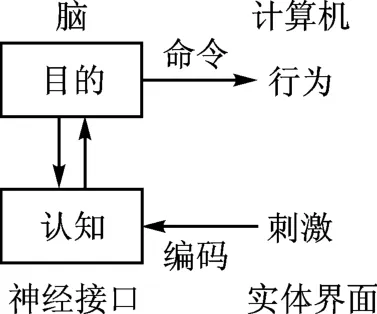
图1 脑-计算机接口系统结构
2 脑-计算机接口系统组成
脑-计算机接口系统基本工作原理如图2所示,包含脑电信号的采集、分析及控制3部分。来自外界的刺激信号会对大脑产生相对应的神经电活动(即EEG信号),EEG信号与即将发生的肢体活动相对应,计算机对EEG信号进行预处理及特征提取后,采用各种分类算法识别EEG信号,通过识别结果来判断出引发脑电变化的动作意图,计算机传输信号并驱动外部设备,将动作意图转换成机器的实际动作,这样有运动障碍的残疾人就可以与外界进行交流了。
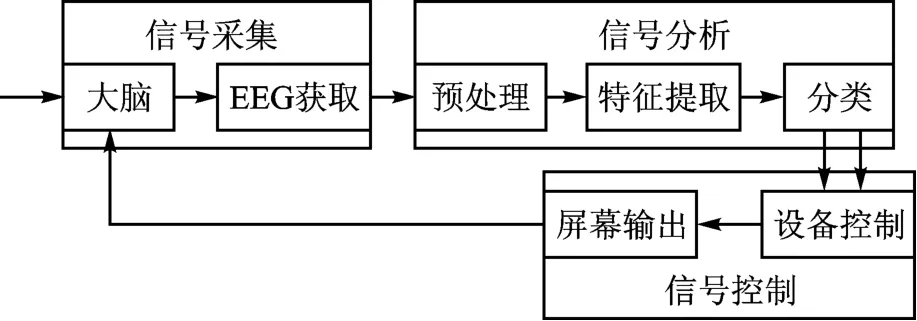
图2 脑-计算机接口系统基本工作原理
2.1 信号采集
目前,EEG信号的采集主要有两种方法:一种是介入式采集,将电极植入脑皮层下,这种方法获得的EEG信号噪声较小,精度较高,能够精确测量大脑神经元某个部分的活动状态,但是脑内的电极结构和功能稳定不能够得到保证,植入电极的定位和试验安全性也存在问题;另一种方法是非介入式EEG信号采集,该方法用来测量头皮表面的EEG信号,这种方法更加安全而且试验时间较短,目前EEG信号的采集主要是通过这种方法,但是使用这种方法采集到的EEG信号噪声大、精度低。非介入式EEG信号采集过程中,确定头皮电极位置采用的是国际脑电图学会建议的标准电极安放法—10/20系统法,如图3所示。
2.2 信号分析
经过预处理和离散化后的EEG信号的特征需要被提取,方法有多种,典型方法有傅里叶变换、时/频域分析法、参数估计法、低通滤波等,这些特征提取方法的应用主要是区分代表思维任务的主要特征。如果特征集代表的思维任务特征相互之间重叠过多,对意识任务分类难度就会加大,提取后的特征将作为分类器的输入。近年来,神经网络分析[5-7]、小波分析、遗传算法、支持向量机(SVM)、混沌分析等在脑电分类中得到广泛的运用,代表了EEG信号现代分析方法的新进展。
2.3 信号控制
信号控制部分的功能是将分好类的信号转换为实际动作(如开关灯、字母输入、轮椅控制等),有的系统设置了反馈环节的脑-计算机接口系统,可以帮助受试者清楚地了解其思维产生的控制结果,实时反馈能够明显提高脑-计算机接口的性能。在大脑中,反馈通常考虑到两种纠正机制:一种是运动执行过程中的在线控制和错误更正;另一种是学习,在一个或更多动作的执行后,逐渐产生对指令的适应。在脑-计算机接口系统中,对于用户获得脑电反应的控制是反馈训练时必不可少的。脑-计算机接口技术基于模式识别方法和意识任务,并没有明确要求进行反馈训练,但是反馈可以加速学习过程并提高性能。其中,光标控制是颇受欢迎的反馈类型,如2002年国际BCI竞赛数据,一位健康的受试者根据电脑屏幕的指示将光标进行上下移动,从而得到其皮层慢电位的视觉反馈。
3 面临的挑战
目前,脑-计算机接口技术仍在不断发展,但是,能够在现实生活中使用的系统几乎不存在,大多数系统还处于在实验室中进行测试的阶段。通过研究脑-计算机接口系统,人们对脑电产生的神经生理学机制有了认识,并且深刻了解了神经系统及其大脑功能,为解释大脑活动的本质提供了重要线索。脑-计算机接口系统还存在着许多问题,解决这些问题的关键在于脑电信号的特征提取和分类。以下是脑-计算机接口系统面临的问题:
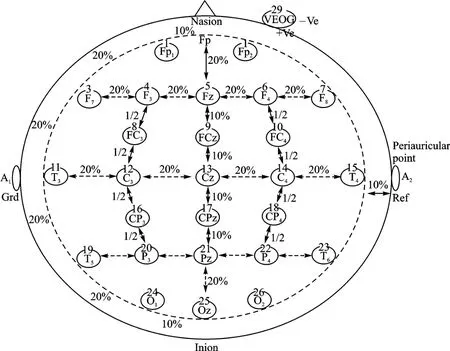
图3 10/20电极安放示意图[4]
①连接到神经系统,会导致永久性脑损伤,造成感觉、运动的损失,或持续疼痛。
②病毒的攻击可能引发脑部疾病。
两者舵的使用情况见图6和图7,可很直观地看出,使用指数函数修饰的控制器进行航向控制时,动舵幅度较模糊控制小很多,通过使用MATLAB进行计算可以得到,图6的平均舵角为1.94°,图7的平均舵角为2.27°,平均舵角下降了0.33°,降幅约为15%,而舵的使用情况在一定程度上可反映出船舶能量的消耗,以及船舶营运过程中船员的舒适感。所以,使用指数函数修饰的航向保持控制器,不仅能够降低能源的消耗,而且还在一定程度上改善船员的工作生活环境。
③由于脑电信号十分微弱,包含眼电、肌电等尾迹,如何减少脑电信号的干扰成分、提取有效的脑电信号特征、寻找最优的特征提取算法和分类算法。此外,还存在分辨率不高和通信速度慢等问题[8-9]。
④脑-计算机接口设备需要用线连接到设备,是非便携式的,需要携带电脑。
⑤脑-计算机系统的速度太慢,有运动障碍的残疾人与外界进行交流时,实时性要强,要能够接近正常人间的交流速度。
⑥现有设备价格昂贵,不适合普通人购买,而且现在应用于实际生活中的较少,大多还处在实验室阶段。
⑦脑-计算机接口技术的研究要满足用户的个体差异,适应用户的多样化要求。
⑧脑-计算机接口技术在现实中应用时,要减少电极数量,降低使用的复杂程度。
4 应用领域
脑-计算机接口技术具有广阔的应用前景,是很多学科领域的研究热点。
(1)医学领域
现在,很多脑瘫、脊髓损伤、肌肉萎缩、脑中风、多发性硬化等疾病损伤了肌肉或者控制肌肉运动的神经通路,而脑-计算机接口系统可以帮助有运动障碍的残疾人用思维控制电脑,让他们像正常人一样上网阅读,进行开、关灯等操作。对于失去肢体的人来说,神经假肢技术可以利用脑电信号来控制和支配假肢,该假肢被称为神经假体。同时,在抢险、救援及人类没有办法进入的危险区域,也可以借助神经假体来完成。
脑-计算机接口技术在中风病人和肢体损伤病人的康复训练中得到了广泛的应用,可以帮助残疾人或失去运动能力的老年人进行主动康复训练,BCI护理机器人可以从事基本护理工作,提高残疾人或老年人的生活质量[10]。
脑-计算机接口技术在医疗检测方面也有着良好的应用前景,麻醉医生可以通过脑电信号监测病人的麻醉深度信息,减少或降低麻醉药物对病人大脑的损害。
慢性的脑部疾病癫痫主要是由于大脑神经元的异常放电引起的暂时性脑功能失调,会引起人的不同行为障碍,如感觉、意识和运动方面。因此,对癫痫脑电信号(EEG)的检测与记录、病灶定位、癫痫预测(可以做到提前预防)及癫痫的病情分析具有极其重要的意义,而且在对多动症及癫痫的治疗过程中,脑-计算机接口技术也可以有效避免药物对病人身体的损害。
脑-计算机接口专家加州大学伯克利分校神经学副教授Jose Carmena通过在鼠类上植入脑机接口研究大脑神经回路。2014年,他参与了美国军方7 000万美元的研究项目,该项目通过大脑植入物分析、控制情绪,来治疗美国士兵的多种精神疾病,未来将可以大大降低因精神疾病造成的自杀事件[11]。
在视觉和听觉假体方面,脑-计算机系统的应用包括:人工电子耳蜗、脑干植入、合成视觉、人造硅视网膜等。
(2)非医学领域
脑-计算机接口系统可以为人们提供一种全新的娱乐方式,如用思维玩电子游戏。通过脑-计算机接口技术,人们通过“意念或思维”控制鼠标、键盘或操作杆来完成电子游戏或进行机器人足球赛等[12]。
在交通领域,利用脑-计算机接口技术实现无人驾驶汽车、火车、飞机等,《神经工程学》杂志报道,用思维来控制直升机航模,可以实现稳定的飞行,其躲避障碍物的成功率高达90%[13]。
脑-计算机接口技术不仅给残疾人带来了很大的帮助,而且为正常人提供了“第三只手”,在双手被占用的情况下,让人们可以根据特殊环境的需要,进行一些多目标的并行控制操作,充分发挥人的潜能[14]。
除此而外,脑-计算机接口技术还可应用在智能家居等领域。
结 语
脑-计算机接口技术发展30余年来,已经成为各学科领域的研究热点,涉及多个交叉学科的综合研究,包括计算机技术、信息技术、生物医学工程、人工智能、康复工程等领域。但随着技术的发展与科技的进步,脑-计算机接口技术在未来将会使人们在沟通手段、行动方式、生活方式等方面发生巨大的变革。
[1]Editorial G.Brain-computer interface technology:a review of the second international meeting[J].IEEE on Neural Systems and Rehabilitation Engineering,2003(11):94-109.
[2]刘辉,杜玉晓,彭杰,等.脑-计算机接口技术发展[J].电子科技,2011(5):116-119.
[3]杨瑞霞.脑机接口技术研究[J].山东轻工业学院学报:自然科学版,2009(2):46-49.
[4]吴捷,张宁.小波相干分析及其在听觉与震动刺激事件相关诱发脑电处理中的应用[J].生物物理学报,2007,23(6).
[5]贾花萍.基于神经网络集成的思维脑电信号分类方法[J].计算机与数字工程,2011(4).
[6]贾花萍.基于PNN神经网络的EEG信号分类方法研究[J].河南科学,2011(7).
[7]贾花萍.基于神经网络的光标上下移动EEG信号分类方法[J].现代电子技术,2010(10).
[8]Wolpaw J R,Mcfarland D J,Vaughan T M.Braincomputer interface research at the wadsworth center[J].IEEE on Rehabilitation Engineering,2000,8(2):222-226.
[9]Pfurtscheller G,Neuper C,Guger C,et al.Current trends in Graz brain-computer interface (BCI)research[J].IEEE Trans Rehabilitation Engineering,2000,8(2):216-219.
[10]高诺,鲁守银,张运楚,等.脑机接口技术的研究现状及发展趋势[J].机器人技术与应用,2008(4).
[11]未来科技五大趋势:太空漫游、脑机接口和隔空互动[EB/OL].[2014-12].http://new.caijing.com.cn/tech/20141110/3745117.shtml.
[12]王行愚,金晶,张宇,等.脑控:基于脑-机接口的人机融合控制[J].自动化学报,2013(3).
[13]李琦.人机接口技术:用思维控制机器[J].中国战略新兴产业,2014(8).
[14]伏云发,王越超,李洪谊,等.直接脑控机器人接口技术[J].自动化学报,2012,38(8):1229-1246.
