基于iGMR原理角度传感器TLE5012B应用指南
2015-07-01何喜富
何喜富
英飞凌科技(中国)有限公司

何喜富
英飞凌科技(中国)有限公司
1 TLE5012B简介
TLE5012B角度传感器基于iGMR技术,可检测平行于封装表面磁场的360°变化,应用于汽车和工业领域转角位置检测,如方向盘转角、电机位置等。
TLE5012B内部集成角度计算模块,可以将原始值(sine和cosine)进行数字处理后输出绝对角度,其内部集成自动标定和温度补偿功能,在温度范围和寿命周期里可以达到1°精度,符合汽车级认证,可工作在-40~150 ℃范围。
TLE5012B具备极其精确的角度分辨率(15 bit)以及快速的信号处理能力和较短的延时/更新率,适合精确测定高动态应用中的转子位置,同时TLE5012B具有先进的诊断功能及安全特性,确保了产品的高可靠性。
1.1 iGMR原理
所谓磁阻效应是指导体或半导体在磁场作用下其电阻值发生变化的现象,巨磁阻效应在1988年由彼得·格林贝格(Peter Grünberg)和艾尔伯·费尔(Albert Fert)分别独立发现,他们因此共同获得2007年诺贝尔物理学奖。研究发现,在磁性多层膜如Fe/Cr和Co/Cu中,铁磁性层被纳米级厚度的非磁性材料分隔开来。在特定条件下,电阻率减小的幅度相当大,比通常磁性金属与合金材料的磁电阻值高10余倍,这一现象称为“巨磁阻效应”。
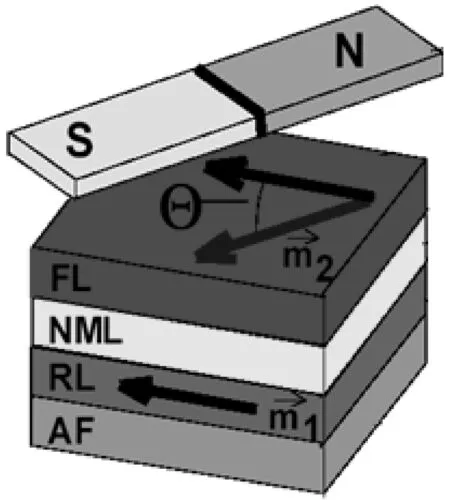
图1 巨磁阻磁性感应层结构
如图1所示,基于巨磁阻效应的传感器其感应材料主要有3层:参考层(RL)、普通层(NML)和自由层(FL)。参考层具有固定磁化方向,其方向不会受到外界磁场方向影响;普通层为非磁性材料薄膜层,将两层磁性材料薄膜层分隔开;自由层磁场方向随着外界平行磁场方向的改变而改变。
巨磁阻阻值由自由层和参考层之间磁场方向夹角决定,当自由层磁化方向和参考层磁化方向相同时,巨磁阻阻值最小。反之,当自由层磁化方向和参考层磁化方向相反时,巨磁阻阻值最大。
巨磁阻效应可以用量子力学解释,每一个电子都能够自旋,电子的散射率取决于自旋方向和磁性材料的磁化方向。若自旋方向和磁性材料磁化方向相同,则电子散射率低,穿过磁性层的电子较多,从而呈现低阻抗。反之,若自旋方向和磁性材料磁化方向相反,则电子散射率高,穿过磁性层的电子较少,从而呈现高阻抗。
1.2 iGMR角度检测原理
图2所示为巨磁阻角度传感器感应单元结构,由两组惠斯通电桥构成,分别为反映外界磁场余弦变化的VX巨磁阻感应单元和反映外界磁场正弦变化的VY巨磁阻感应单元。VX和VY巨磁阻感应单元结构类似,只是参考层磁化方向不同。使用全桥结构的好处是,可以获得两倍信号幅值以及消除温度效应影响。
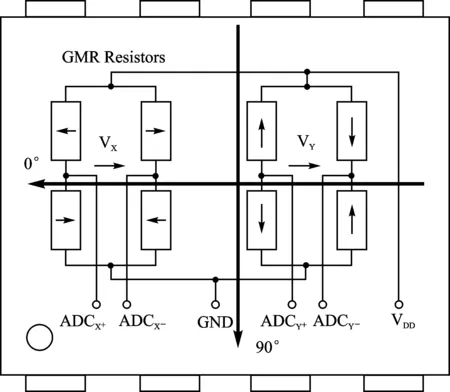
图2 巨磁阻惠斯通桥
当安装在转轴上的磁铁随着转轴旋转时,巨磁阻感应单元VX和VY能够检测出平行于其表面的外界磁场变化,并分别输出余弦和正弦信号。磁场信号经过A/D转换,通过传感器内部 CORDIC(COordinate Rotation DIgital Computer)模块进行反正切计算,得到所需要角度值,最后通过不同信号协议输出角度等信息。
2 通信协议
TLE5012B支持多种通信协议,即SSC(Synchronous Serial Communication)协议、PWM(Pulse-Width-Modulation)协议、SPC(Short-PWM-Code、兼容SENT协议)协议、HSM(Hall Switch Mode)模式以及IIF(Incremental Interface)协议。
TLE5012B SSC为三线制协议,允许双向通信,兼容SPI协议,可以通过SSC协议读取TLE5012B内部寄存器数据(如角速度、角度原始数值、温度等)以及配置寄存器(如解析度、自动标定、工作模式等)。SSC允许高速数据传输,波特率为8 Mb/s。一个总线上最多允许4个TLE5012B进行通信。SSC通信距离较短,建议在30 cm以内,所以适合板间通信。
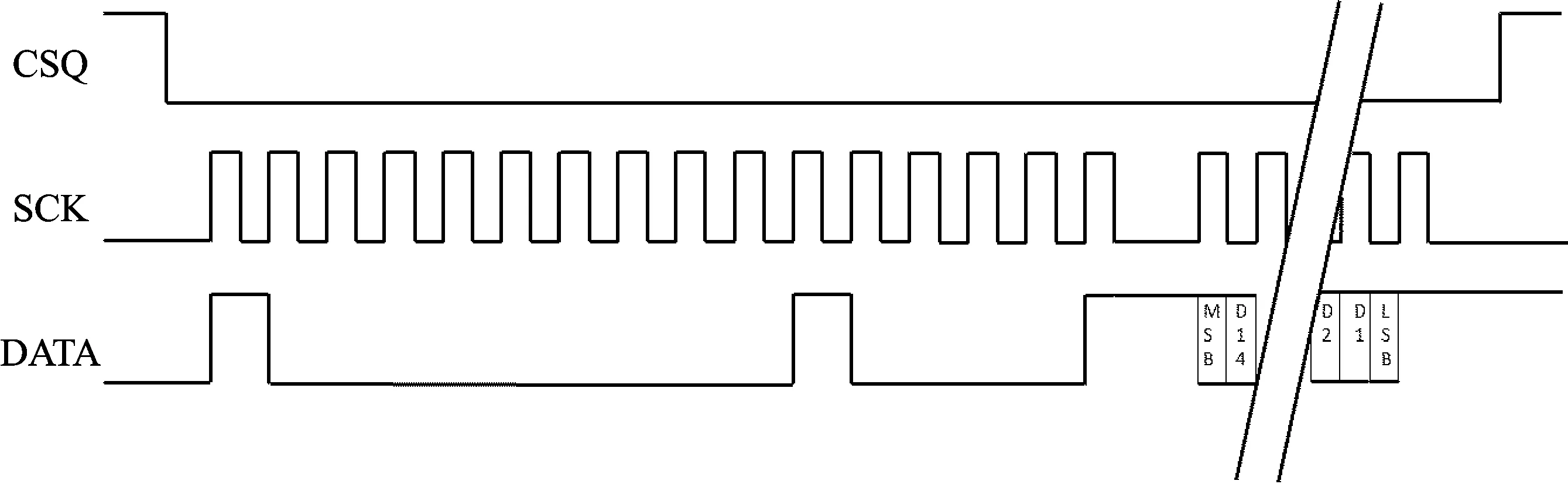
图3 MCU读取角度信息
PWM通信协议为单向通信方式,解析度为12 bit,有4种工作频率0.2 kHz、0.5 kHz、1 kHz以及2 kHz,可通过SSC接口配置工作频率。占空比代表角度信息,其中占空比在0~6.25%以及93.75~100%区间用于诊断,在6.25~93.75%区间代表角度。PWM通信距离可到5 m。
SPC协议兼容SENT协议,连续的两个下降沿之间的时间长度代表4 bit数据。不同的是SPC允许双向通信,且通信时MCU需要给TLE5012B发送一个触发信号以唤醒其传输角度信息。除角度信息外,还可传输温度信息,可通过SSC接口配置解析度为12 bit或者16 bit。一个总线上最多允许4个TLE5012B进行通信。SPC通信距离可到5 m。
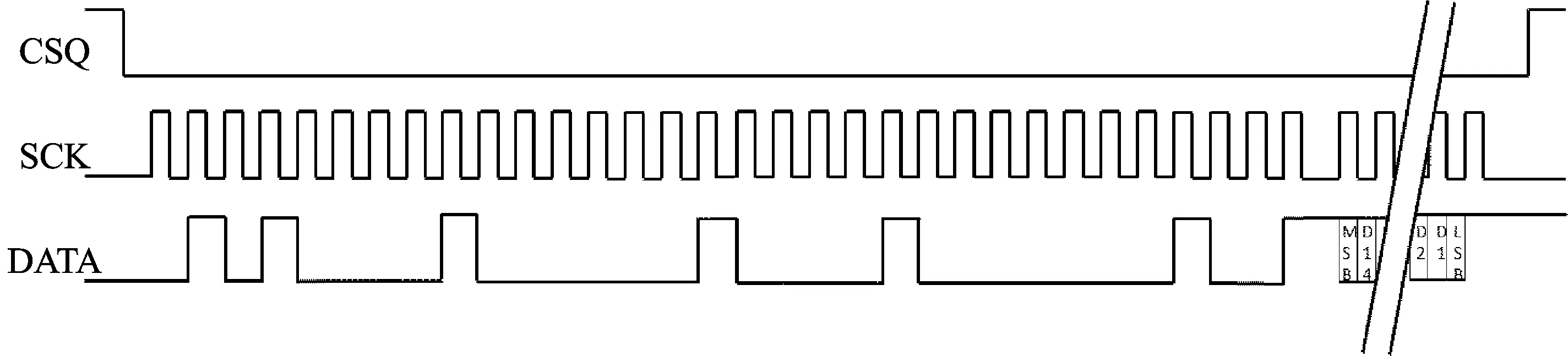
图4 寄存器配置
HSM模式可模拟3个霍尔开关,用于电机块换向。HSM包含3个单向通信接口,默认极对数为5,可通过SSC接口配置极对数等参数。
IIF协议可用于模拟光电编码通信,包含IFA、IFB以及IFC三条单向通信信号,可以取代光电编码器,用于高速电机位置检测。IIF增量编码信号为输出占空比50%的矩形波,每一个波形代表最小角度解析度,可以通过SSC接口配置成9 bit(每一圈512个脉冲信号)到12 bit(每一圈4 096个脉冲信号)解析度,MCU通过计算IIF信号脉冲数可以知道电机位置信息。
TLE5012B出厂时预标定了寄存器配置,用户可以在不作修改或者很少修改寄存器配置情况下使用。TLE5012B主要有4种版本,即:TLE5012B E1000 SSC+IIF、TLE5012B E3005 SSC+HSM、TLE5012B E5000 SSC+PWM、TLE5012B E9000 SSC+SPC。用户可以根据需要选择合适版本,限于篇幅,本文主要介绍SSC和IIF协议。
2.1 SSC协议
TLE5012B SSC数据传输方式为半双工,因此当和四线制SPI接口通信时,MCU SPI接口数据发送和数据接收引脚需要同时连接到TLE5012B data引脚上。当TLE5012B向MCU传输数据时,MCU的数据发送引脚需要拉高,反之,当MCU向TLE5012B发送命令时,MCU的数据接收引脚需要拉高。
SSC传输信息包含命令、数据以及安全信息,信号传输时CSQ需要拉低,并提供SCK信号,可以通过SSC协议读取以及配置TLE5012B内部寄存器数据。如图3所示为MCU通过SSC读取TLE5012B内部寄存器角度信息,MCU向TLE5012B发送8021H,经过twr_delay延迟后,TLE5012B会返回角度信息及状态信息。
如图4所示,为MCU通过SSC配置TLE5012B内部寄存器MOD_2。MCU发送命令5081H,修改MOD_2寄存器内容为809H。 经过twr_delay延迟后,TLE5012B会返回状态信息。当安全信息传输完毕后,下一个数据传输前片选信号CSQ需要退出然后再拉低。
为了保证配置信息准确无误,可以在写入数据前先读取所需要配置的寄存器内容,再配置该寄存器,最后再读一遍配置内容确认是否正确。
SSC传输数据里安全信息包括CRC校验,每一组新的数据传输都会产生新的CRC校验。TLE5012B CRC校验基于J1850总线规范,需要注意的是,进行CRC校验时,需要包含发送的命令以及接收到的数据。
2.2 IIF协议
TLE5012B E1000有两种IIF工作模式,即A/B Mode以及Step/Direction Mode。
图5所示为A/B Mode,其中IFA和IFB输出脉冲代表角度信息,两个信号相位相差90°,根据A相位是否超前B相位判定电机转动方向,IFC代表零点位置。
TLE5012B E1000默认IIF协议为A/B Mode,可以通过SSC配置为Step/Direction Mode。图6所示为Step/Direction Mode,其中IFA输出增量信号代表角度信息,
IFB代表方向信息,而IFC代表零点位置。
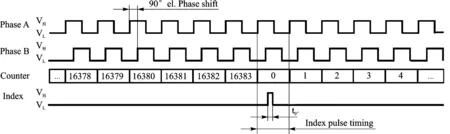
图5 A/B Mode
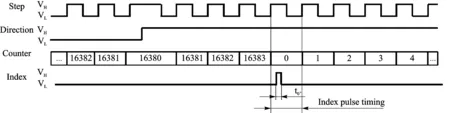
图6 Step/Direction Mode
TLE5012B内部14位计数器(IIF_CNT)用于增量编码计数,能够记录一整圈从0~16 383个脉冲, 可用于MCU和传感器之间的数据同步,其取决于内部寄存器设置(IIF解析度9~12 bit),同步时IIF_CNT需减掉2~5个LSB数据。
当TLE5012B E1000上电后,电机还没有开始转动,TLE5012B IIF引脚会输出一定脉冲数,此为TLE5012B E1000启动特性,MCU通过计算脉冲数可获得TLE5012B起始位置绝对角度信息,即:起始位置绝对角度=脉冲数×180°/211。
起始位置脉冲最大数目在180°位置,此时有2 048个脉冲。如果IFA相位在IFB相位之前,则该角度在0°~180°之间。如果IFB相位在IFA相位之前,则角度在180°~360°之间。起始位置脉冲结束后,TLE5012B进入正常工作模式。
3 TLE5012B设计
3.1 机械结构设计
TLE5012B用于电机转子位置检测方案,可以用于替代光电编码器、旋转编码器或者霍尔开关。磁铁装配在电机转轴上,安装有TLE5012B传感器的PCB固定在电机上,磁铁中心正对着位于TLE5012B中心的巨磁阻感应区域。当电机工作时,转轴带动磁铁转动,传感器能够检测到平行于其封装表面的磁场变化。这种方案优点是,电路以及机械结构设计简单、成本低、空间小。相比于光电编码器,TLE5012B不易受灰尘、油污等污染。与基于霍尔原理的磁性角度传感器相比,基于巨磁阻原理的TLE5012B精度更高。
为了减小由于安装或者生产带来的误差(如PCB安装、芯片贴片、磁铁装配)以及转轴径向跳动等因素导致的额外系统误差,尽量选择直径较大的磁铁,且安装时磁铁中心尽量正对着TLE5012B芯片中心巨磁阻感应区域。
3.2 磁路设计
TLE5012B需要工作在合适的磁场强度范围, 在-40~150 ℃温度范围内建议外部平行磁场强度为30~50 mT,因此设计磁路时需要确保工作气隙范围内磁场满足要求。由于巨磁阻传感器检测的是平行磁场,因此垂直于封装表面的磁场BZ对巨磁阻传感器没有影响,可以用磁通计检测磁路磁场强度,如图7所示。
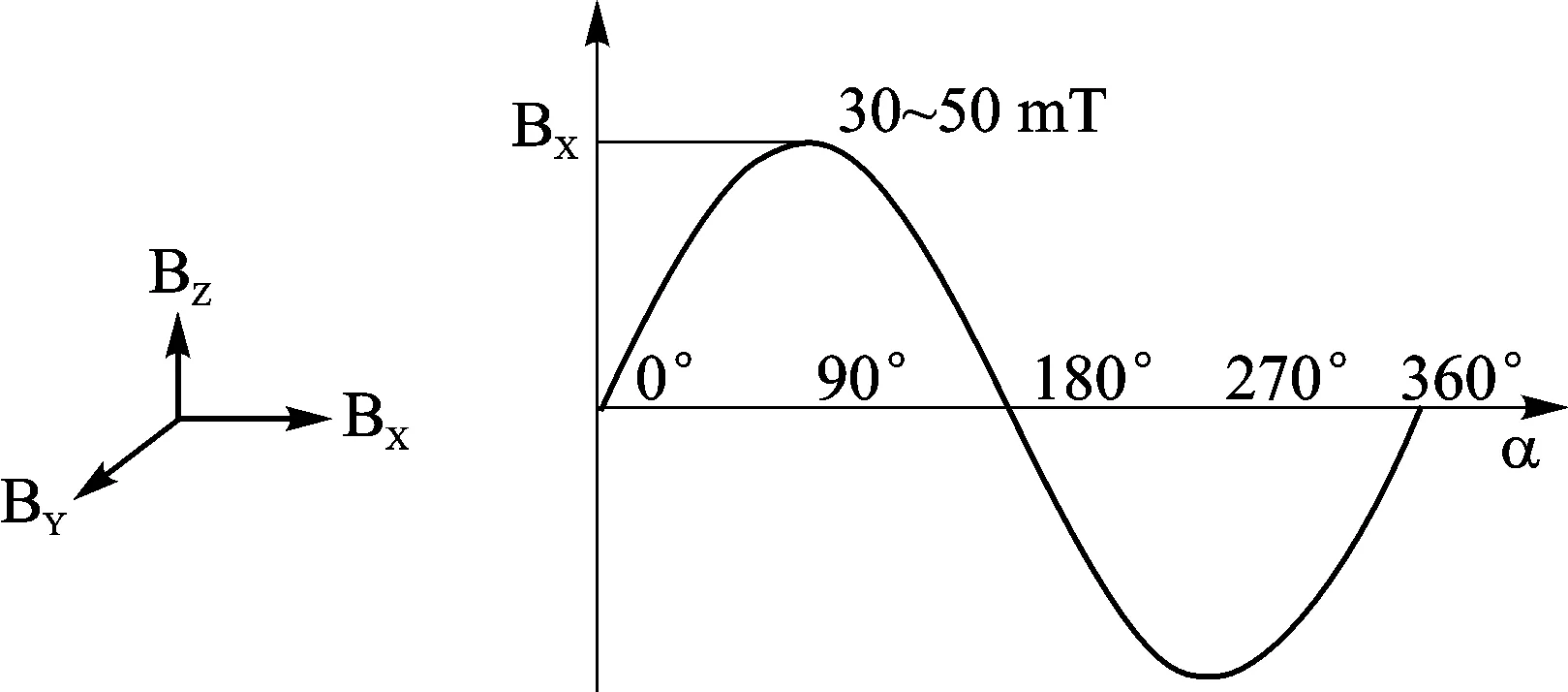
图7 工作磁场范围
外部磁场强度过小或者过大都会增加额外的角度误差。当外部磁场强度太弱时,不足以驱动自由层磁化方向很好地对齐外部磁场方向。当外部磁场强度太强时,会影响到参考层磁化方向,但是外界磁场强度过强并不会造成芯片的损坏,只是会影响检测精度,当外界磁场强度恢复到规定范围内时,检测精度又能够恢复到正常范围。
影响磁路磁场强度的因素主要有磁性材料、尺寸和厚度等。为了减小误差,在全温度范围内其磁性尽可能稳定,理论上可以选择稀土材料如钐钴或者钕铁硼等,也可以选择铁磁性材料。综合考虑温度特性、磁场特性等,推荐使用SmCo5材料。推荐磁路设计参数如下:剩磁Br为0.9 T,充磁方向为径向充磁,磁极对数为1对,直径10 mm,厚度1.7 mm,工作气隙(磁铁表面距离传感器表面)2.5 mm(确保磁场强度在工作范围内时传感器可工作在更大气隙)。
3.3 电路设计
TLE5012B E1000 版本应用电路略——编者注。
TLE5012B和MCU相连,可以通过SSC接口或者IIF接口获取TLE5012B角度等信息。TLE5012B E1000 IIF 接口(IFA、IFB以及IFC)默认为push-pull接口,可通过SSC配置寄存器设置为open-drain接口,此时输出接口和供电电源之间需相应增加上拉电阻。
SSC和IIF协议通信距离较短,对于需要长距离传输的情况,可以将信号进行差分处理,一种可行的电路设计略——编者注。
4 电机位置信息
4.1 位置信息
TLE5012B能够检测平行于其封装表面磁场的360°变化,其检测原理为通过检测外界磁场方向和芯片内部巨磁阻感应单元参考层磁化方向之间夹角来感应角度。当外部磁场方向如图2所示时,TLE5012B检测到角度为零度,需要注意的是此时反映的零点为磁场零点,而非电机的机械零点。即当传感器转动时其输出的角度是相对于磁场零点而言的,而非相对于电机的机械零点。
TLE5012B能够同时反映绝对角度信息和相对角度信息。获取绝对角度信息的方法有两种:通过SSC方式,或者利用TLE5012B E1000启动特性。利用SSC方式可以获得实时的绝对角度信息,但需要注意的是,TLE5012B E1000 启动特性结束后进入正常工作模式,此时获得的角度信息为相对角度。
4.2 零点位置标定
在没有将传感器磁场零点和电机机械零点对齐之前,传感器磁场零点并不一定等于电机的机械零点,因此传感器反映的角度均是相对于磁场零点而言。如果需要标定传感器零点位置,可以通过下面两种方式进行。
4.2.1 SSC方式标定零点
传感器接线方式参考TLE5012B E1000版本应电路,具体操作步骤如下:
① 将电机位置定位到所需要的机械零点位置。
② 通过SSC接口读取寄存器AVAL寄存器的数值,例如假设此时AVAL里数值为1FFEH,角度值为90°。
③ 移除AVAL寄存器里3位LSB角度值,获得12bit角度,即1FFEH移除3位LSB后变成3FFH。
④ 通过SSC接口读取ANG_BASE寄存器数值,例如假设此时ANG_BASE数值为072H。
⑤ 将ANG_BASE数值减去步骤3里获得新的AVAL数值(即072H-3FFH=C73H),并将该值存储到MCU的EEPROM中。
⑥ 每次TLE5012B上电后,将存储在MCU EEPROM里AVAL数值写入到TLE5012B ANG_BASE中。
通过以上步骤,便可以完成电机零点位置标定。需要注意的是,由于TLE5012B不具备存储能力,因此每次上电以后均需要将外部EEPROM存储的AVAL数值写入到TLE5012B ANG_BASE中。
4.2.2 IIF方式确定零点
在不能通过SSC方式对TLE5012B零点标定情况下,还可以利用IIF协议中IFC信号找到磁场零点,再将该信号与机械零点比较找到两者之间角度偏移量。当电机转动到磁场零点时,TLE5012B E1000的IFC引脚会发送一个脉冲信号,代表磁场零点位置。根据磁场零点和机械零点相对位置信息可以求出偏移量,当需要相对于机械零点的绝对位置信息时,可以通过补偿该偏移量求得。

�士然
2015-01-25)