基于DSP的扭矩-转速复合信号模拟器设计*
2015-07-01刘渊张天宏田彦云
刘渊,张天宏,田彦云
(南京航空航天大学 江苏省航空动力系统重点实验室, 南京 210016)
基于DSP的扭矩-转速复合信号模拟器设计*
刘渊,张天宏,田彦云
(南京航空航天大学 江苏省航空动力系统重点实验室, 南京 210016)
介绍一种基于DSP的发动机控制器实物在回路仿真的扭矩-转速复合信号模拟器,其将扭矩-转速复合信号的一个周期信号分解为包含高-低-高-低4个时间段的2个脉冲,利用DSP的高速定时中断精确控制每个脉冲的高低电平切换时刻;通过对输出信号的精确测量,补偿因中断延迟造成的周期和相位的误差;通过串口中断接收模型计算机输出的扭矩-转速的特征参数,将其存储于定义的一种先进先出缓冲区结构体中,并在定时中断中对特征时间参数进行保护性更新。
DSP;扭矩-转速模拟器;TMS320F28335;先进先出缓冲区
引 言
对于航空涡轴、涡桨发动机,为了进行扭矩和功率的匹配控制,会在其功率输出轴上安装一种扭矩-转速复合信号传感器。该传感器的旋转件是一个扭转轴,扭转轴在同一个截面上布置反映入口轴和出口轴扭转角度大小的轮齿(一般有4个大致均匀错开的齿,其中一对互成180°的齿对应入口轴,另一对齿对应出口轴),传感器的静止件是一个磁感探头,当扭转轴旋转时,磁感探头基于磁电感应原理输出感应电动势信号,该信号表征了扭矩-转速复合信号,即信号的脉冲频率反映转速大小,相邻脉冲信号的相对相位的改变反映扭矩大小及其方向。在发动机控制器实物回路仿真试验系统中,需要根据发动机仿真模型的输出,动态地模拟输出轴扭矩-转速的信号变化,即需要动态地模拟脉冲信号的频率和相邻脉冲信号相对相位的改变,从而构成控制系统的闭环仿真回路,实现扭矩和功率的匹配控制。模拟的扭矩-转速复合信号的频率精度和相位精度将直接决定仿真系统的有效性和置信度。
目前,工程上针对扭矩-转速信号模拟问题,一般采用以下两种方法:
① 缩比物理模拟,即使用扭矩缩比的扭矩-转速传感器,通过电机驱动其旋转,并通过测功器等扭矩加载装置产生扭矩;
② 基于微控制器的电子模拟,即使用2路频率信号发生器,其中一路频率信号以边沿中断和可编程的相位延迟触发第二路频率信号,两路频率信号通过一个加法器合成电路得到扭矩-转速复合信号。
方法①可提供扭矩缩比的复合信号,信号特征与真实机载传感器一致,但需要电机驱动装置和扭矩加载装置,因此过于复杂且成本高,违背了硬件在线仿真的便利性原则,而且电机的转速控制和扭矩加载的精度及实时性也难以保证。
方法②采用电子的方式进行模拟,因需要2路频率信号发生器和1个中断接口而占用较多资源,且需要额外的合成电路,增大了信号模拟的复杂程度;由于采用边沿中断控制相位延迟大小,中断延迟等因素会造成相位精度的误差;因两路频率信号发生器的频率更新不同步会导致更新点信号周期不完整,从而可能会导致控制器测量错误。
因此,本文设计了一种简洁、精确的扭矩-转速模拟器,其不需要额外的合成电路,节省了控制器的资源。通过对输出信号的精确测量补偿了因中断延迟造成的周期和相位误差,从而有效提高了信号模拟的精度。此外,该模拟器不存在两路频率信号发生器频率更新不同步的问题,而且在定时中断中对特征时间参数进行保护性更新,从而在保证扭矩-转速复合信号模拟具有较好实时性的同时,避免了更新不当导致周期信号不完整的问题。该模拟器的成功研制为航空发动机数字控制系统的设计开发提供了一定帮助,具有较高的工程价值。
1 系统总体方案设计
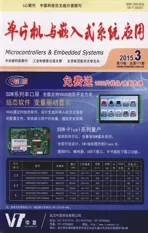
航空发动机扭矩-转速复合信号模拟器系统原理框图如图1所示。扭矩-转速复合信号模拟器首先通过串口中断接收模型计算机输出的扭矩-转速的特征时间参数,当接收到一个完整数据帧后,再通过串口发送通信成功应答消息,然后根据接收到的特征时间参数进行数据处理,得到目标方波信号的高低电平脉宽值,最后根据高低电平脉冲宽度,定时器中断服务程序分别置相应的端口为高电平和低电平,从而模拟出所需扭矩-转速复合信号并提供给电子控制器。
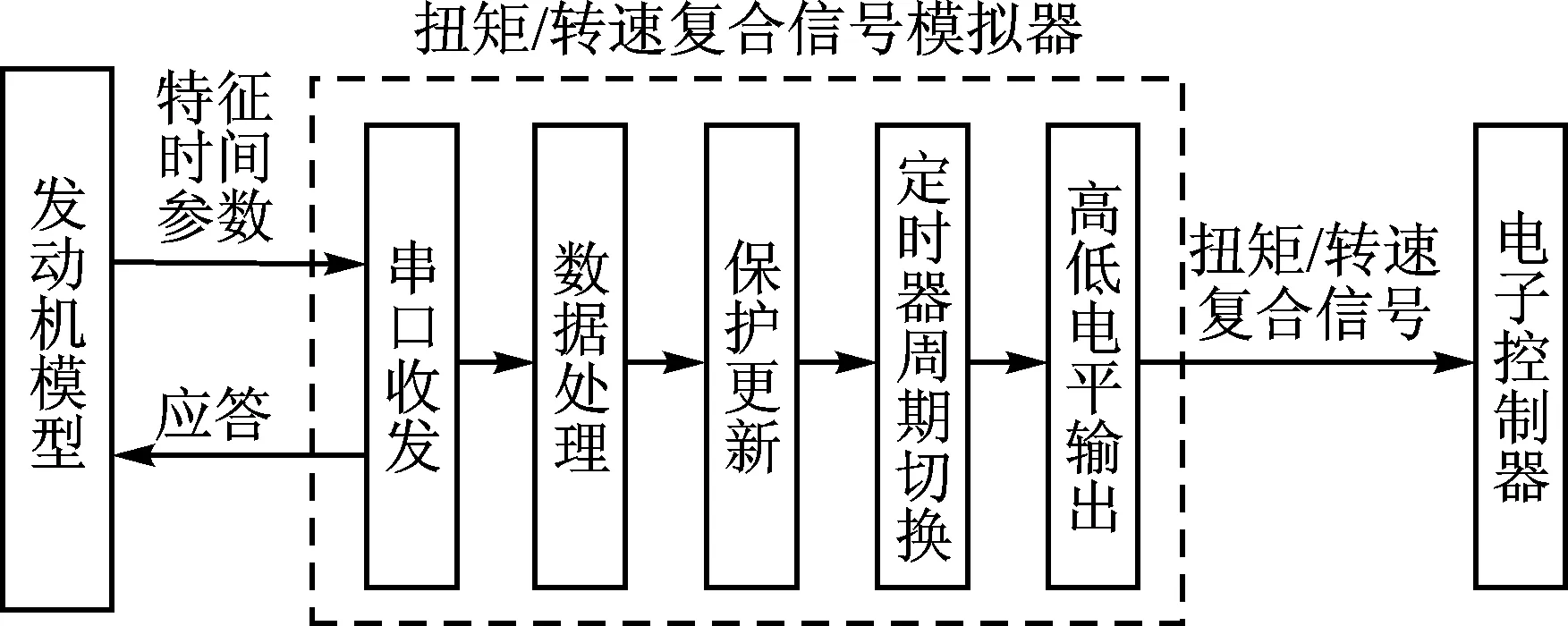
图1 系统原理框图
2 系统硬件设计
扭矩-转速模拟器硬件电路采用了核心板加底板架构,硬件结构框图如图2所示。由于该模拟器是航空发动机数控系统开发中的一个重要工具,因此必须选择运算速度快速且可靠性高的处理器。模拟器选择TI公司的TMS320F28335作为CPU,其具备强大数据处理能力和较高的运行速度,并且拥有多个高精度定时器和多路SCI接口,可满足定时和通信要求。模拟器的DSP核心板即为TMS320F28335的最小系统,其外设都以插座的形式预留给底板。底板电路模块具备两路输出通道,主要包括USB转串口模块及电平转换模块。
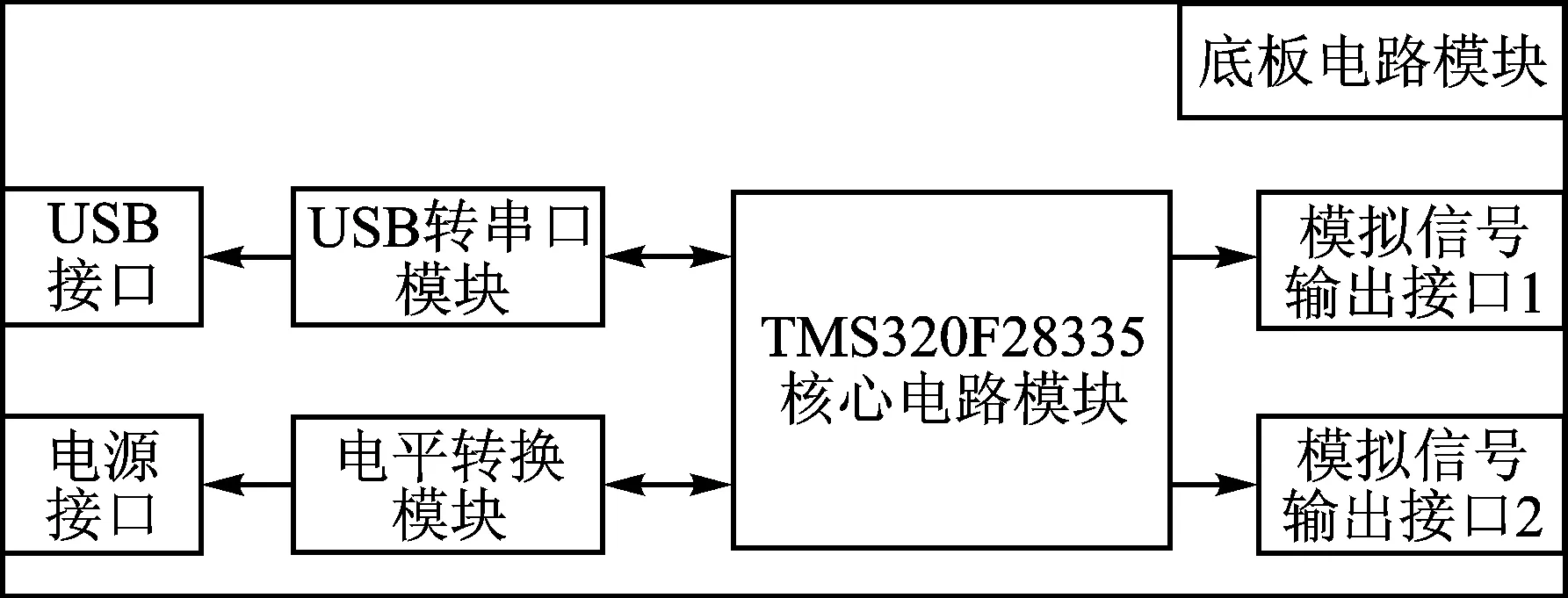
图2 硬件结构框图
3 系统软件设计
本系统的软件流程如图3所示。在程序运行机制上,采用前后台编程模式,让后台主流程运行在一个无限循环当中,中断服务程序作为前台程序运行,这样的运行机制保证了重要中断事件响应速度快,提高了软件的实时性。
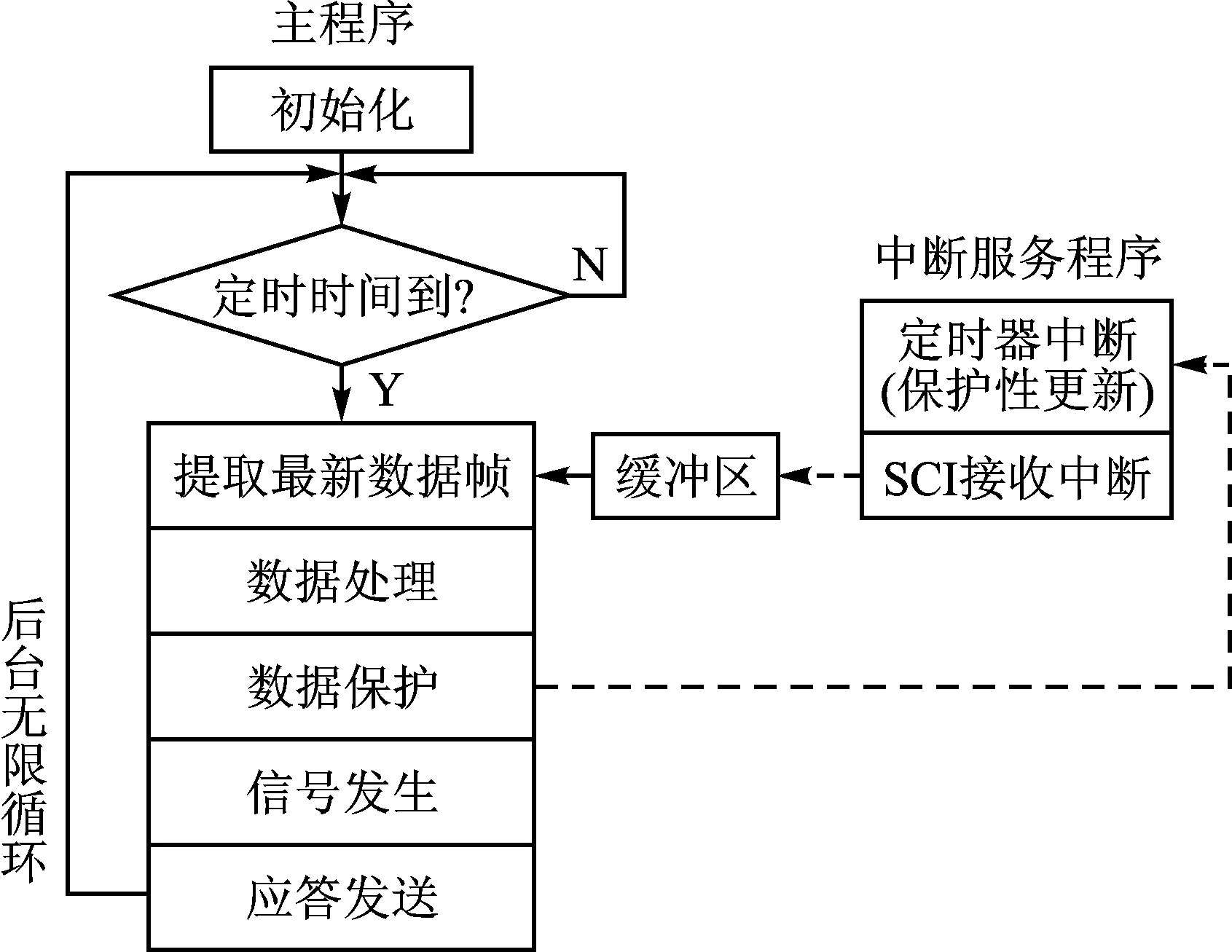
图3 系统软件流程图
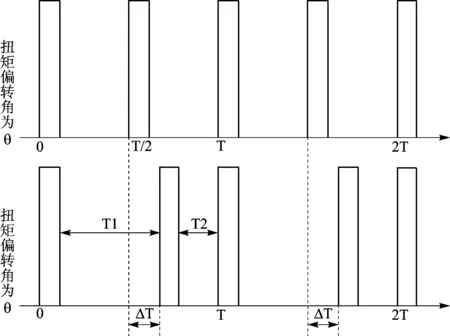
图4 输出扭矩-转速复合信号图
输出扭矩-转速复合信号图如图4所示。图中上方表示无扭矩时扭矩-转速复合信号模拟器输出的方波信号,下方则表示相同转速下扭矩偏转角为θ时所输出的方波信号。其中,T为功率输出轴转动半圈时的方波周期,其反映了转速大小;ΔT则为相对于无扭矩时的相位偏差,其反映了扭矩大小及方向。在一个周期信号内包含高-低-高-低4个时间段的2个脉冲,脉冲的高电平周期为一个相对于T较小的固定值,低电平脉宽值分别为T1和T2。
3.1 数据通信及处理模块设计
扭矩-转速复合信号模拟器通过串口中断接收模型计算机输出的扭矩-转速的特征时间参数T和ΔT,当接收到一个完整数据帧后,通过串口发送通信成功应答消息。为减少串口通信时CPU的开销,DSP的SCI支持16级接收FIFO,但由于扭矩-转速复合模拟器在接收模型计算机发送的数据时需要对数据进行验证,因此为保证接收数据的实时检测,仅使用一级FIFO,波特率为36 400。共7个字节,以0x55、0xAA开头,接着是两个字节的T和两个字节的ΔT(低位在前,高位在后),最后为和校验。具体通信协议如下所示。
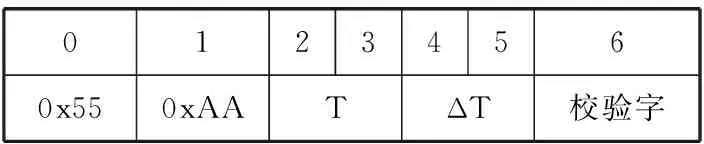
01234560x550xAATΔT校验字
区别于一般的SCI接收算法,本模拟器的软件首先定义了一个先进先出缓冲区结构体,SCI接收到的数据最初均存储于其中,在定时器1的作用下,每20 ms主流程根据缓冲区内数据长度及特征字,判断出具有完整数据帧的最新有效特征时间参数,提取该特征时间参数并清理缓冲区。这种方法保证了数据的完整性和更新的实时性。
在得到T和ΔT值后,还不能直接提供给定时器中断服务程序,必须对数据进行处理以得到低电平的周期,计算公式如下:
T1=T-2+ΔT
T1=T-2-ΔT
高电平脉宽值取一个相对于T较小的固定值,此处为100 μs。
3.2 模拟信号发生模块设计
明确了方波信号的高低电平周期值后,将其提供给定时器0的中断服务程序,通过switch语句对GPIO进行交替置位,从而达到方波信号模拟的效果。此外,在定时器中断内,利用两个全局变量保护性更新同一个周期内的两个低电平特征时间参数,防止在一个周期内低电平周期被篡改,从而保证了方波信号每个周期的完整性与正确性。
具体程序如下:
interrupt voidcpu_timer0_isr(void){
switch(state1){
case0:
CpuTimer0Regs.PRD.all = 15000-360;
//设置高电平脉宽,中断补偿
CpuTimer0Regs.TCR.bit.TRB = 1;
//开中断
GPIO_High1; //GPIO口置高
state1=1; //状态位置位
T1_box=T1; //数据保护
T2_box=T2;
break;
case1:
CpuTimer0Regs.PRD.all = T2_box-360;
//设置低电平脉宽,中断补偿
CpuTimer0Regs.TCR.bit.TRB = 1;
//开中断
GPIO_Low1; //GPIO口置低
state1=2; //状态位置位
break;
case2:
CpuTimer0Regs.PRD.all = 15000-360;
//设置低电平脉宽,中断补偿
CpuTimer0Regs.TCR.bit.TRB = 1;
//开中断
GPIO_High1; //GPIO口置高
state1=3; //状态位置位
break;
case3:
CpuTimer0Regs.PRD.all = T1_box-360;
//设置低电平脉宽,中断补偿
CpuTimer0Regs.TCR.bit.TRB = 1;
//开中断
GPIO_Low1; //GPIO口置低
state1=0; //状态位重置
break;
default:
break;
}
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
//关中断
}
当扭矩-转速复合信号模拟器输出模拟方波波形后,利用精密示波器测量输出信号高低电平脉宽值,并将其与目标值作比较,在定时器中断程序中补偿因中断延迟造成的周期和相位的误差。由于中断延迟造成的周期和相位的误差基本不变,因此只需补偿一次。不同目标值时,补偿前后的脉宽值如表1所列 。

Torque-speed Composite Signal Simulator Based on DSP
Liu Yuan,Zhang Tianhong,Tian Yanyun
(Jiangsu Province Key Laboratory of Aerospace Power System,Nanjing University of Aeronautics and Astronautics,Nanjing 210016, China)
Composite signal simulator of torque-speed used in aero engine controller based on DSP is introduced in this paper.The design decomposes the periodic signal of torque-speed composite signal into two pulses containing high-low-high-low four intervals,and it uses high-speed interrupt timer of DSP to precise control high and low switching time of each pulse.Through precise measurement of its output signals,periodic and phase error caused by interruption delay can also be compensated.The simulator receives characteristic parameters from model computer by serial interrupt,restores them into a defined FIFO structure and protectively updates the parameter of characteristic time in timer interruption.
DSP;torque-speed simulator;TMS320F28335;FIFO buffer
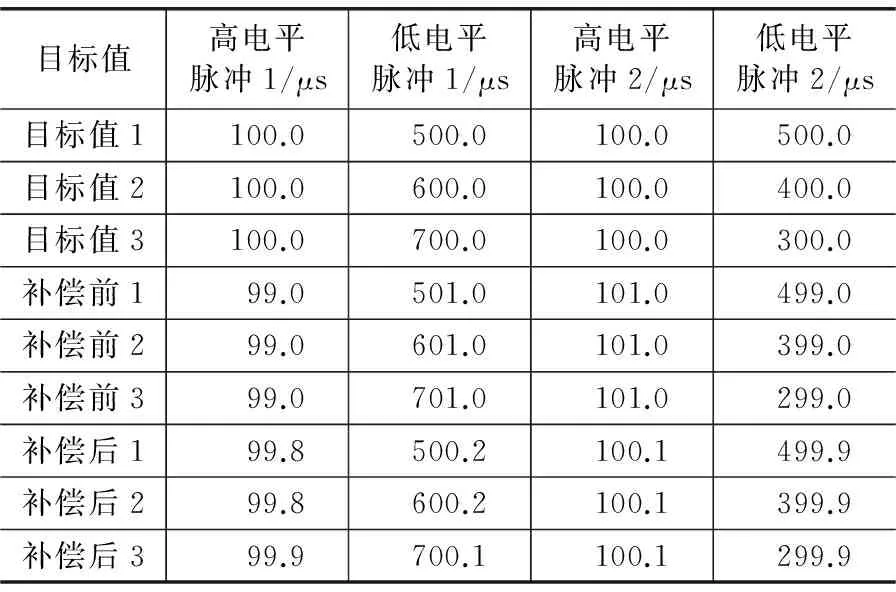
表1 补偿前后脉宽值
南京航空航天大学研究生创新基地(实验室)开放基金资助(kfjj201462),中央高校基本科研业务费专项资金资助。
TP216.8
A