基于EKF⁃SLAM算法的水下膨胀弯测量技术
2015-06-29隋海琛王崇明雷鹏
隋海琛,王崇明,雷鹏
(交通运输部天津水运工程科学研究所,天津300456)
基于EKF⁃SLAM算法的水下膨胀弯测量技术
隋海琛,王崇明,雷鹏
(交通运输部天津水运工程科学研究所,天津300456)
水下计量技术普遍应用于海管法兰之间相对空间位置和方位角的测量,其结果直接关系到水下膨胀弯的设计和预制是否准确。文章阐述了基于EKF⁃SLAM算法,融合水下声学定位、惯性导航、多普勒计程仪、压力计、声速计等数据的水下声学惯导计量技术,它能够实现厘米级的测量精度,而且作业方式简单,不受水深和能见度的限制,可有效提高海上工作效率,节约海上施工成本。
EKF⁃SLAM算法;水下膨胀弯;水下声学惯导计量;尺寸测量
随着海洋石油事业的蓬勃发展,越来越多的海底管线铺设到海底,这就伴生出水下膨胀弯的连接工程,即海底管线之间用法兰和膨胀弯进行连接的形式,又称跨接管线。过去的经验表明,连接水下膨胀弯最关键的工序是海管法兰之间相对空间位置和方位角的测量[1]。只有精确地测量出膨胀弯两端法兰(或连接器)的各项参数,才能准确地预制出膨胀弯,从而顺利地安装。
膨胀弯法兰的水下测量,一般要求测量误差在0.05~0.10 m,属于精密的水下计量技术的范畴。目前最常见的方法为拉线法(Taut Wire),包括浅水使用的海管法兰测量仪[2]和深水使用的SWM、PMT、MRP等[3],它们能够直观地测量并读出数据,使用方法比较简便,测量原理也不复杂;但是,测量方式略为粗放,测量所得数据精度不高。此外,长基线(LBL)水下定位和三维声呐扫描等声学测量方法在水下计量中应用也非常普遍[4],虽然数据精度很高,但设备安装复杂、校准也很繁琐,海上作业工期较长,大大提高生产成本。
近年来,以IXBlue COMMET和Sonardyne SPRINT为代表的水下声学惯导测量方法得到了大量的应用,可与LBL测量方式媲美,很多膨胀弯都被精准、快速地测量并安装。这种也称为水下声学惯导计量(Subsea Acoustic Inertial Metrology)的技术通过使用基于扩展卡尔曼滤波(EKF)的SLAM算法,融合了水下声学定位、惯性导航、多普勒计程仪、压力计、声速计等数据,可快速实现膨胀弯数据的精确测量,整个过程中声学设备不需要校准、操作方式简单、多个目标可同时测量且不需要通视、对膨胀弯的长度也没有要求,大大节约了测量的时间和成本,也提高了测量精度。
1 EKF⁃SLAM算法介绍
卡尔曼滤波是一种状态空间信息融合算法。它以测量误差为依据进行估计和校正,通过递推得到最小均方误差意义下的全局最优的状态估计,广泛应用于运动物体的多传感器信息融合、导航、控制等领域。然而,许多动态系统和传感器模型是非线性的,在理论上难以找到严格的递推滤波公式,对这些系统就不能使用标准的卡尔曼滤波算法。对于一般的非线性估计问题,可以采用扩展卡尔曼滤波(EKF)等近似线性方法解决,通过对非线性函数的Taylor展开式进行一阶线性化截断、忽略高阶项,得到近似的系统状态估计,但前提是非线性函数必须是近似线性的。尽管如此,由于EKF简单易行,既能对状态的不确定性进行描述,又具有良好的迭代特性便于计算机实现,因此在工程上被广泛应用。
同时定位与地图构建算法(Simultaneous Localization and Mapping,以下简称SLAM)是基于扩展卡尔曼滤波(EKF)发展起来的,可以实现移动机器人在未知环境下的自主导航,近年来已大量应用于各种不同的环境中,如室内环境、室外环境、水下环境等[5]。SLAM算法可以描述为:移动机器人在一个分布有许多静止特征的未知环境中运动,通过自身携带的传感器(声呐、惯导、计程仪等)不断采集环境信息,确定环境中各个特征之间的相对关系,创建增量式环境地图,从而实现自身的定位,如图1所示。因为假设了所有环境特征是静止不变的,随着观测的不断推进,环境特征间的相关性会随着观测次数的增加而不断增强,从而使算法收敛,以环境特征表示的地图也变得越来越精确。虽然随着地图的增大,EKF⁃SLAM的实时性会变得很差,但在小尺度的环境下EKF⁃SLAM使用方便、精度很高,可以有效地处理非线性的卡尔曼滤波问题。
EKF⁃SLAM算法的系统状态向量由机器人状态和地图中的环境特征状态两部分组成,维数可随着新特征的增加而扩展。为了使机器人的状态与环境特征的状态相关,定义了一个增广状态向量,它同时包含机器人的状态和特征的状态。
SLAM算法的执行过程大体上可划分为4个阶段:预测阶段、观测阶段、更新阶段和扩充阶段,如图2所示。首先将机器人的状态和地图环境特征存储在增广状态向量中,然后通过先预测再观测的迭代递推过程来估算系统状态,实现对机器人的同时定位与特征地图的构造。
在预测阶段,机器人利用自身携带的惯导系统和计程仪等传感器进行位置推算,获得机器人下一时刻的位姿。在观测阶段,利用机器人携带的声学测量传感器(如声呐等)测量海底环境中的特征,并对声呐数据进行处理,提取点特征。将该点特征转换到全局坐标系下,并与已有的点特征进行数据关联,若是新特征,则进入扩充阶段,将它添加到地图中;若是已有特征,进入更新阶段,将两者的位置偏差作为新息,利用扩展卡尔曼滤波(EKF)算法,得到机器人状态和地图特征的最优估计;若是虚假信息则将其直接除去。

图1EKF⁃SLAM算法示意图Fig.1Diagram of EKF⁃SLAM algorithm

图2基于EKF的SLAM算法流程图[6]Fig.2Flow chart of EKF⁃SLAM algorithm
2 水下测量作业内容和方法
水下膨胀弯(或跨接管线)为井口与管汇接口之间的连接管线,测量的对象是安装膨胀弯的2个连接器,需要确定其严格的位置参数,如图3所示,包括:(1)两者之间的水平距离;(2)两者之间的垂直高差;(3)每个连接器的艏向、纵倾、横倾;(4)沿设计路由的水深剖面;(5)两者连线与设计路由的夹角α和β。测量精度要求为:相对距离误差小于0.1 m;角度测量误差小于1°。

图3水下生产系统中的跨接管线Fig.3Jumper&spool of subsea production system
测量中用到的关键仪器为水下声学设备(如IXBlue RAMSES)和声学信标,在整个应用过程中,不需要声学设备校准。为了使用SLAM算法实现测量作业,还需要以下辅助设备:光纤惯导系统(INS)用于Kalman滤波中的三维状态推算和姿态测量;多普勒计程仪(DVL)用于Kalman滤波中的速度测量,并有效减小INS的漂移;压力计用于消除高度(Z方向)测量的误差,提高滤波精度;声速计用于提高声学定位的精度,有助于SLAM算法的应用。
在SLAM算法中的移动机器人,即ROV,携带声学设备与惯导、计程仪组成的水下组合定位系统,其中声学设备定位可达到亚米级精度,结合计程仪可将惯导的系统漂移降低到几乎为零。而环境地图中的未知海底特征,则指的是需要测量的2个膨胀弯连接器。在测量过程中,应至少使用2个声学信标,并将其固定在连接器基座上。通过SLAM算法,系统不断预测、观测、更新2个声学信标的三维状态,随着观测次数的增加,2个信标形成的基线向量越来越稳固,其相对关系也越来越准确,在水平面的2个坐标轴上都形成高质量的参考系统。每次信标进行声学定位后,其进行的新息更正都会进一步减小残留的误差,通过顺时针和逆时针各2次的围绕飞行,即可使信标之间的距离精度达到厘米级精度。如果有新的信标加入,则SLAM算法会自动扩充特征信息,每2个信标之间的距离都可被精确测量出来。
上述辅助设备在完成距离测量后,还可进行其他测量工作。如使用光纤惯导系统测量每个连接器的艏向、纵倾、横倾等,使用压力计测量2个连接器之间的高差和路由水深等。
3 应用实例
以Eni Saipem与中海油在2013年完成的荔湾SSIV⁃01至CEP的工程为例。荔湾3⁃1气田位于中国香港东南约350 km,水深1 350~1 500 m,是我国第一个大型深水开发项目,其深水工程包括水下生产系统、水下管汇、内部管线、以及深水区至浅水平台的海底管线等。在水下管线的建设中,有大量的膨胀弯(跨接管线)安装作业,需要提供连接器之间的位置参数,其中水平距离和垂直距离的误差要求小于0.07 m,艏向误差小于2°,纵倾和横倾误差小于1°。
在测量过程中,使用到如下设备:搭载在ROV上的IXBlue COMMET声学惯导计量工具,由RAMSES、INS、DVL、声速计、压力计等组成;3个IXBlue RT9型声学信标,其中2个安装在膨胀弯的连接器基座上,另一个安装在设计路由附近的座底式三脚架上,用于数据的校核。作业前,在开始位置对声学计量工具中的INS进行了校准,在这个过程中ROV静置在海底,每20 min转动180°,直至艏向的标准差低于0.07°。
校准完成后,按照图4所示,使ROV围绕水下建筑物进行顺时针和逆时针各2次的飞行测量,飞行高度约在建筑物上方15 m,速度为0.7~0.9节,测量时间应保证能获得足够的数据为准。飞行的半径约为信标间距的2倍,其圆心正好是信标连线的中点。由于已建平台的影响,未能完成完整的360°圆圈。测量结束后,ROV回到开始位置静置5 min,检查INS是否发生漂移,以确认测量数据的有效性。完成INS的检查以后,使用ROV依次将声学信标从膨胀弯连接器基座和座底式三脚架上取下,并使用声学计量工具中的INS和压力计测量基座和三脚架的艏向、纵倾、横倾和高度。测量姿态时,INS的方向应与基座的艏向相一致。
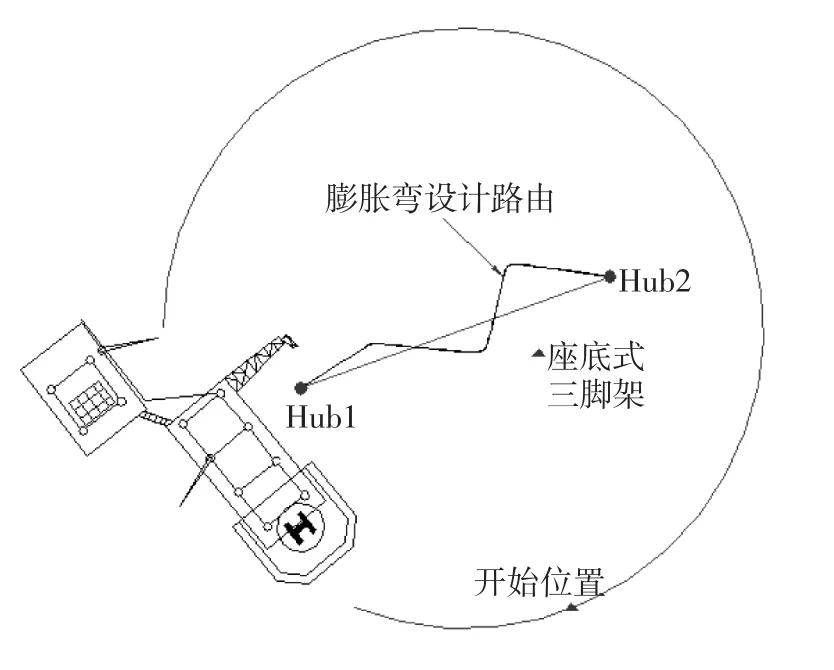
图4SLAM测量示意图Fig.4Diagram of SLAM Metrology

表1连接器声学计量结果Tab.1SLAM metrology result of Jumper

图5连接器连线与设计路由的夹角Fig.5Angle between line and route of Jumper
计算连接器之间的距离前,应先对获得的数据进行Y、Z方向的偏移改正和倾斜改正。连接器连线的方位角应沿管内气体的流向,由连接器的坐标计算得到。测量结果见表1,图5绘制出了连接器连线与设计路由的夹角α和β。
4 结论
以EKF⁃SLAM算法为基础的水下声学惯导计量技术,不受水深的限制,不受水下能见度的影响,仅仅在海底布设很少的信标,就可达到长基线(LBL)等级的测量性能。在作业前,仅需对惯导系统进行校准即可,简化了操作流程,提高了工作效率,节约了海上施工成本。通过观测次数的增加,提高了信标位置之间的相关性,保证了数据之间的检核和质量控制,加强了测量数据的稳定性和准确性。在测量过程中,对膨胀弯的长度没有特殊的限制,而且通过增加信标的数量,可以同时完成多个计量任务。如此种种的优点,使水下声学惯导计量技术倍受深水作业人员的青睐,在我国大力发展深水油气开发的今天,必将得到越来越广泛的应用。
[1]毛丽娟,刘婧,陈兆胜,等.海管膨胀弯安装常见问题浅谈[J].石油和化工设备,2013,16(7):44-45.
[2]朱绍华,魏行超,刘勃.使用法兰测量仪进行海底管线膨胀弯测量技术研究与应用[J].中国海上油气,2008,20(5):342-344. ZHU S H,WEI X C,LIU B.Study and application of measure technology by flange measure instrument to spool piece connection of subsea pipelines[J].China Offshore Oil and Gas,2008,20(5):342-344.
[3]白勇,龚顺风,白强,等.水下生产系统手册[M].哈尔滨:哈尔滨工程大学出版社,2012.
[4]IMCA S019,Guidance on Subsea Metrology[S].
[5]王文晶.EKF⁃SLAM在水下航行器定位中的应用研究[D].哈尔滨:哈尔滨工程大学,2007.
[6]王培勋.基于子地图连接的机器人同时定位与地图构建研究[D].青岛:中国海洋大学,2010.
Subsea acoustic metrology of jumper&spool based on EKF⁃SLAM algorithm
SUI Hai⁃chen,WANG Chong⁃ming,LEI Peng
(Tianjin Research Institute for Water Transport Engineering,Tianjin 300456,China)
Subsea metrology surveys are conducted to determine accurately the relative horizontal and vertical distance between subsea assets,as well as their relative heading and attitude.This information is then used by pipe⁃line engineers to design connection pieces to join the assets together.Based on acoustic measurement technology and the fusion of acoustic positioning,inertial navigation,Doppler velocity log,pressure gauge,sound velocity meter data under water,the EKF⁃SLAM algorithm was described in this paper.It can realize the cm level accuracy,and operating mode is simple,no depth and visibility constraints.It can effectively improve the work efficiency to save the time and cost.
EKF⁃SLAM algorithm;jumper&spool;subsea acoustic inertial metrology;dimensional measure⁃ment
P204
A
1005-8443(2015)04-0362-04
2015-01-12;
2015-02-27
中央级公益性科研院所基本科研业务费专项资金项目“水下组合导航定位技术研究”资助(TKS130209)
隋海琛(1975-),男,山东省寿光人,高级工程师,主要从事海洋测绘技术的应用和开发。
Biography:SUI Hai⁃chen(1975-),male,senior engineer.
