基于自动飞行控制系统的反应型风切变改出策略研究
2015-06-24宣东宇漫霜
宣东 宇漫霜


摘要:对大气扰动下的大型飞机CATIII自动着陆控制律设计过程中应对反应型风切变改出控制以及基于最优和预测控制方法的飞机进场下滑干扰抑制进行了研究。通过典型飞行状态模拟和动力学模态建模仿真,验证了反应型风切变纵向改出的俯仰控制律、横侧改出的协调转弯控制律设计的有效性。
关键词:自动飞行控制系统;反应式风切变;风场强度
DOIDOI:10.11907/rjdk.151133
中图分类号:TP302
文献标识码:A 文章编号:16727800(2015)006001904
基金项目基金项目:
作者简介作者简介:宣东(1969-),男,浙江杭州人,上海飞机设计研究院高级工程师,研究方向为飞机设计及研制管理;宇漫霜(1970-),女,陕西西安人,民用飞机模拟飞行国家重点实验室高级工程师,研究方向为飞行试验验证。
0 引言
低空风切变、大气紊流等非定常大气扰动现象严重影响了飞机飞行品质、乘坐品质和飞行安全。据中国民航局统计,1949-2005年,由于大气扰动及伴随的恶劣天气造成的飞行事故(含灾难性事故、一般事故)占总事故的30%以上[1]。据美国联邦航空局(FAA)统计,在1960-2000年,由大气扰动直接导致或间接影响的飞行事故比例为41%[2]。随着飞机自身可靠性的不断提高,由于环境因素导致的飞行事故比例正不断上升。此外,飞机起飞离场和进场着陆时间约只占总飞行时间的5%,但有48%的飞行事故发生在该阶段。这其中,由于低空风切变造成机组情境意识缺失及判断操作失误的约占该阶段事故的66%[3]。鉴于低空风切变对飞机起降安全性的严重威胁,FAA、美国宇航局(NASA)、荷兰德尔夫特技术大学(DFT)、加拿大多伦多大学(UTIAS)等许多著名的航空研究机构就风切变中人工操纵和自动改出控制策略进行了深入研究。在人工操纵改出方面,FAA推荐了PitchGuidance、DiveGuidance、AltitudeGuidance 3种典型的纵向改出策略[4]。尽管风切变改出问题已研究多年,但并不是每次穿越风切变飞行都能成功改出。
随着大型商用飞机自身的安全性和自动化程度的不断提高,可以通过设计高可靠性的自动着陆控制系统取代机组人工操作,降低人工操纵的复杂度和操作负荷。飞机在着陆进场阶段若遭遇扰动风或恶劣天气,其飞行安全将遭受严重威胁。CATIII自动着陆系统可提高飞行的精确性和可靠性,同时降低飞行员的工作负荷,提高在恶劣气象条件下进场着陆的安全性[6]。在CATIII自动着陆控制系统的基础上,研究反应型低空风切变的安全改出飞行策略,并加入到飞机自动飞行控制系统中,则具有很强的现实意义和工程实用价值。
1 含扰动风影响的动力学建模
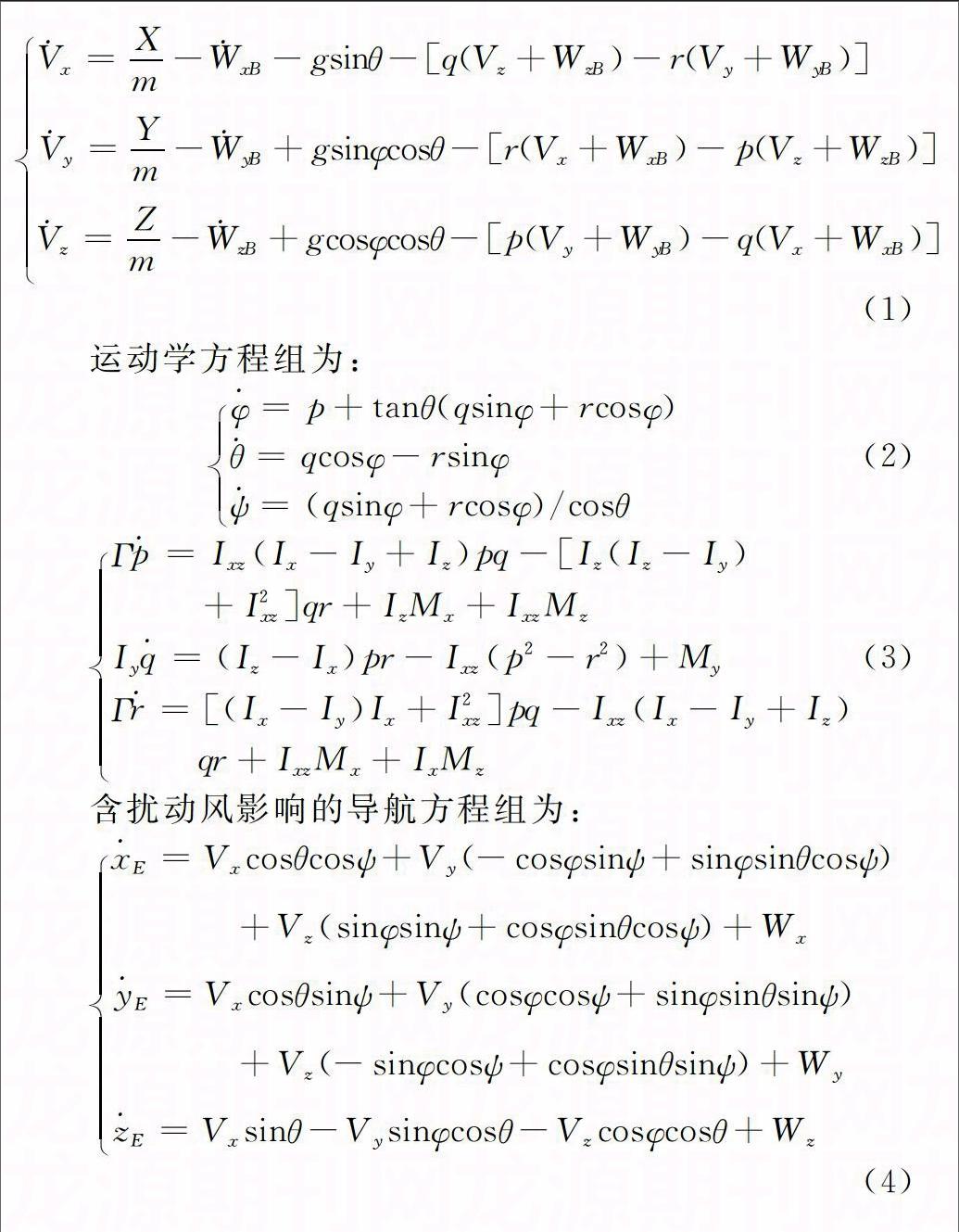
建立飞机六自由度动力学模型以准确描述飞机空中运动的状态,将对飞行仿真研究、控制律设计及验证研究起到基础性支撑作用。飞行动力学建模是飞行力学的经典内容,在此不再赘述,仅引用相关概念和公式。针对高亚音速民用飞机(Ma<0.9)作如下假设:①将飞机视为刚体,质量是常数,重力加速度亦不随高度变化;②将地面坐标系视为惯性坐标系,不考虑地球的公转和自转,且采用平面大地假设;③忽略发动机转子的陀螺力矩效应;④飞机机体坐标系的OBxBzB平面为结构对称面,从而惯性积Ixy=Iyz=0。
飞机在空中的运动除受重力作用外,还受到空气动力、发动机推力及外部扰动。在这些力和力矩的联合作用下,飞机产生沿着三轴的平动和绕三轴的转动。在飞行力学中,将飞机空中运动描述为质心运动方程、运动学方程、力矩方程和导航方程在内的12个状态方程。再将建立的微下击暴流扰动风矢量[Wx,Wy,Wz]T加入到相应的方程中。
2 自动飞行控制律设计与验证
2.1 用于纵向改出风切变飞行的控制律设计与验证
2.1.1 俯仰控制律设计
通过对FAA推荐的风切变纵向改出策略分析可知,纵向改出风切变的机动飞行主要通过控制飞机的俯仰角来实现。通过控制飞机的俯仰角速度,可实现俯仰角姿态控制。
俯仰控制律设计框图如图1所示。由俯仰角速度反馈构成控制内环,俯仰角反馈构成外环。通过实时计算升降舵偏角,使俯仰角速度和角度分别跟踪目标角速度qc和角度θc。实际飞机是通过角速度陀螺和姿态陀螺仪实时测量反馈q和θ,本文仅使用简化的比例环节表示其传递函数。
2.1.2 仿真验证
将以上设计的俯仰控制律加入到动力学模型中进行非线性仿真,以进行控制律验证。以V=76m/s、H=600m、γ=0为初始条件,将模型进行配平得到飞机的平飞状态,模拟B747飞机在600m高度平飞,然后爬升到900m高度并保持一段时间后,再下降到600m高度保持平飞这一飞行过程来验证俯仰控制律。具体仿真结果如图2所示。
仿真过程中,飞机在600m高度保持平飞(如图中前100s所示),之后令θc=5deg直至爬升至900m高度(如图中100~156s所示)。保持平飞一段时间,再以θc=-2deg使飞机下降到600m高度并保持平飞(如图中320~600s所示)。从仿真结果看出,俯仰角速度和角度均能够较好地跟踪指令信号,高度保持较好,实现良好的俯仰角姿态控制。
2.2 自动着陆控制律设计与验证
2.2.1 下滑道跟踪控制律设计
以俯仰控制律为基础,进一步进行飞机高度和速度的控制,从而实现飞机自动着陆控制。自动着陆控制系统如图3所示。在俯仰控制律的基础上,加入速度和下滑道偏差的控制外环,以保证飞机进场着陆过程中,飞行速度和垂直速度稳定,从而沿着预定的下滑道下滑。
由图4可以看出,引入控制律后仍可使飞机水平平稳飞行,接收到下滑控制指令后(γ=-2.5deg),飞机速度有所降低,俯仰角减小,进入下滑飞行状态,此时迎角增大以维持必要的升力,使飞机保持在平稳下滑飞行状态。从平飞调整到下滑的平稳状态大约使用了30s的调整时间,30s后可以沿下滑道平稳飞行。下滑控制仿真结果表明,下滑控制律设计正确。
2.2.3 拉平控制与仿真验证
飞机在着陆之前,须通过拉平将下降率保持在0.6m/s以下,从而减轻着陆时的垂直冲击。如图5所示,在着陆前,要将飞机的航迹倾角从-γ变为-γR,须修正下滑道偏差d以实现飞机垂直速度改变。
在下滑控制中加入下滑修正量d,当飞机下滑至15m以下时进行拉平控制,调节下降速度,使飞机可以拉平以备着陆。
仍以V=76m/s、H=450m、γ=0的初始条件进行模拟试验。将拉平控制加入到下滑控制中,模拟飞机下滑-拉平-着陆的完整自动着陆过程。仿真结果如图6所示。
从图6中可以看出,飞机沿下滑道平稳下降。在下降到15m以下时,进行拉平控制,飞机的飞行状态发生变化,俯仰角增大,飞机下降速度降低,进入平缓的拉平阶段,最终实现着陆。从飞机高度变化曲线可以很清楚地反映飞机下滑-拉平-着陆的整个过程。
下滑和拉平控制仿真表明,建立的动力学模型和控制律基本正确,可以实现飞机自动着陆。在此基础上,可进行飞机进场着陆时改出风切变的仿真分析。
2.3 用于横侧改出飞行的协调转弯控制律设计与验证
2.3.1 协调转弯控制律设计
飞机的转弯是在方向舵和副翼的共同作用下完成,根据这一特点,以升降舵和副翼为输入,以偏航转弯率和横侧加速度为输出,进行转弯控制律设计,如图7所示。采用根轨迹设计法进行协调转弯控制律设计。
2.3.2 协调转弯仿真验证
将设计出的转弯控制律加入到动力学模型中,模拟进行90deg转弯,从而验证转弯控制律。将动力学模型配平在定直平飞状态,12s后进行转弯飞行,转过90deg后再进入定直平飞状态,仿真结果如图8所示。
从图8中可以看出飞行过程中,飞机的速度、迎角、俯仰角基本保持不变;俯仰角速度、侧滑角速度保持为0。转弯过程中,存在着一定的侧滑(β=-1.17deg),偏航角速度约为1.17deg/s,转弯完成后,偏航角转过了90deg。从右下角的图中可以看出,飞机完成90deg转弯。以上仿真结果表明,协调转弯控制律的设计是正确的。
3 结语
本文对大气扰动下的大型飞机CATIII自动着陆控制律设计过程中应对反应型风切变改出控制以及基于最优和预测控制方法的飞机进场下滑干扰抑制进行了研究。应用典型飞行状态模拟和动力学模态建模仿真,验证了反应型风切变纵向改出的俯仰控制律、横侧改出的协调转弯控制律设计的有效性。
参考文献:
[1]中国民航局.民用航空飞行事故汇编(1949-2005),2008(3):5657.
[2]FEDERAL AVIATION ADMINISTRATION[J\].Airplane Upset Recovery Training Aid,2008(6):435436.
[3]THE BOEING COMPANY.Statistical summary of commercial jet airplane accidents worldwide operations[Z\].Statistical Summary,2011.
[4]ATILLA DOGAN.Guidance strategies for microburst escape[D\].Michigan:University of Michigan, 2000.
[5]NUEVO.Getting to grips with category ii and iii operations[Z\].Customer Services Directorate,1998.
责任编辑(责任编辑:孙 娟)
