基于加权侦察覆盖指数的无人机侦察航路评价
2015-06-23李子杰刘湘伟
李子杰,刘湘伟
(电子工程学院,合肥 230037)
基于加权侦察覆盖指数的无人机侦察航路评价
李子杰,刘湘伟
(电子工程学院,合肥 230037)
利用无人机瞬时探测范围和无人机对雷达定位精度构建无人机有效可定位区。综合预定区域目标存在概率和沿侦察航路飞行无人机有效可定位区对栅格侦察覆盖指数,构建加权侦察覆盖指数指标。基于加权侦察覆盖指数,对无人机侦察航路优劣进行评价。
无人机,有效可定位区,加权侦察覆盖指数,侦察航路
0 引言
无人机侦察航路评价,常以单条航路侦察目标数量、有效侦察航路长度等为评价指标[1-3]。这些指标通常只适用于已知目标具体位置的成像传感器侦察无人机,对于携带雷达对抗侦察设备、对未知区域遂行侦察任务的侦察航路难以做出有效评价。本文首先分析无人机有效可定位区,进而提出加权侦察覆盖指数,并据此对无人机侦察航路进行评价。
1 无人机有效可定位区
无人机有效可定位区是指无人机对典型雷达瞬时探测范围边界线和可定位区域边界线所包围的区域。本文从无人机瞬时探测范围和对雷达定位精度两个方面逐步阐述无人机有效可定位区。
1.1 无人机瞬时探测范围
无人机在空中一直处于运动状态,其瞬时探测范围是指某一时刻,无人机在各个方向上对一定辐射强度雷达的瞬时最大侦察距离所围成的区域。设无人机侦察天线波束指向两翼方向一定范围,可确定无人机瞬时探测范围如下页图1所示,无人机瞬时探测范围Regionpar为区域A-B-C-D与区域A'-B'-C'-D'。
图1中Drec为无人机对典型雷达探测距离Rrec在Hradar高度上的投影[1]:
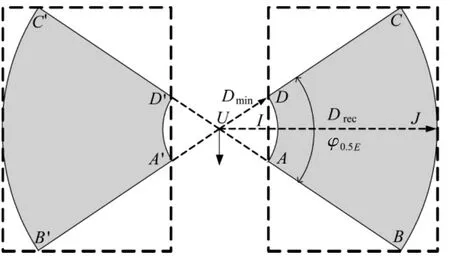
图1 无人机瞬时探测范围示意图
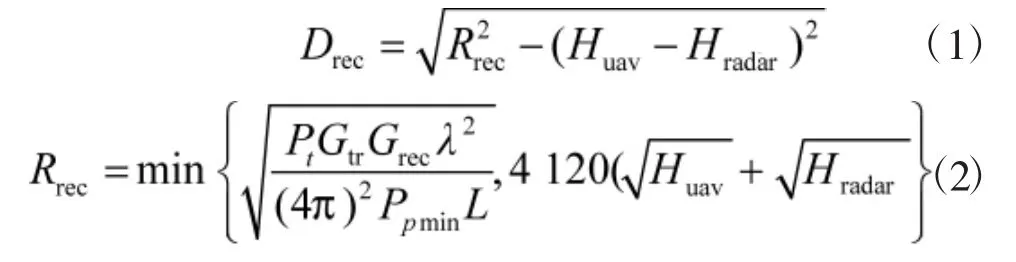
其中,Pt为雷达辐射功率(W);Gtr为雷达发射天线在无人机方向的增益(倍);Hradar为雷达高度(m),Huav为无人机飞行高度(m);L为各种损耗总和;λ为雷达工作波长(m);Ppmin为机载测频接收机最小可检测信号功率(W);Grec为无人机侦察天线增益(倍)。
特定高度水平飞行的无人机瞬时探测范围大小不随飞行航向和航程点变化。图1中所示扇环可由Drec、Dmin和φ0.5E唯一确定,其中,Dmin可表示如式(3)所示。θ0.5E为侦察天线俯仰向波束宽度。

1.2 无人机对雷达定位精度
无人机单站定位方法主要有测向定位法、测多普勒频率差定位法、测相位差变化率定位法等[5-7]。比较而言,测相位差变化率定位方法定位速度快、定位精度高,是无人机主要采用的定位方法[5]。假设无人机等高飞行,通过归纳关于无人机测相位差变化率定位的诸多文献可知,无人机对雷达定位精度主要与无人机坐标xi和yi、飞行速度vx和vy、相位差变化率φi、目标辐射源方位角βi、雷达工作频率fTi、航向角α及其变化率的测量误差△xi、△yi、△vx、△vy、△φi、△βi、△fTi、△αi、△·i等有关。在假设其他因素确定的条件下,无人机对雷达定位精度与无人机和雷达相对位置有确定关系:

由于篇幅有限,本文不对定位精度具体推导过程进行阐述,具体可参考文献[5-7]。
综合考虑无人机瞬时探测范围和对雷达定位精度,设定位精度标准为σstd,无人机有效可定位区域可表示为:

无人机有效可定位区域面积SRegionrec很难解析求值,可通过随机模拟方法求得,具体步骤如下:
算法1
步骤1:置Numrec=0。
步骤2:在以无人机所处位置(xi,yi)为圆心、Drec为半径的圆内产生随机点(x,y)。如果(x,y)满足σ((x,y),(xi,yi))≤σstd,(x,y)∈Reigonpar,则Numrec=Numrec+1。
步骤3:重复步骤2共Num≥10 000次。
步骤4:无人机有效可定位区域面积SRegionrec≈。
2 加权侦察覆盖指数
2.1 栅格侦察覆盖指数
根据对预定侦察区域信息掌握程度,可将预定侦察区域分类为无先验信息的预定侦察区域和有先验信息预定侦察区域。无先验信息预定侦察区域,即区域内目标雷达存在概率未知;有先验信息预定侦察区域,是根据前期情报积累和雷达部署常识,认为可能存在目标雷达的区域。预定侦察区域内可能同时存在多个子区域。在估计出各子区域部署雷达概率的同时,还要估计相应雷达的工作频段。为描述作战区域态势信息,本文首先将预定侦察区域进行栅格处理。取栅格中心坐标为网格坐标,栅格内部具有相同属性。
为描述无人机对某一栅格内目标的侦察、定位情况,本文建立栅格侦察覆盖指数这一无人机侦察效能评估指标。
定义1(栅格侦察覆盖指数):无人机沿侦察航路飞行,预定侦察区域内,处于有效可定位区内的某一栅格,被侦察的频段与栅格待侦察频段重合程度。有效可定位区外的栅格侦察覆盖指数为0。
设栅格gridm待覆盖频段范围为,其长度为,在侦察开始之前,预定侦察区域内各栅格侦察覆盖指数为0。栅格被侦察频段,为有效可定位区覆盖过gridm的所有无人机工作频段的并集:


2.2 加权侦察覆盖指数
栅格侦察覆盖指数反映的是无人机对单一栅格频域上的覆盖程度,并不能反映无人机对整个预定侦察区域在空域和频域上的覆盖程度。利用目标存在概率对栅格的侦察覆盖指数加权处理,能够反映无人机对预定侦察区域的侦察效能。无人机对预定侦察区域的加权侦察覆盖指数可表示为:

3 基于加权侦察覆盖指数的侦察航路评价实例分析
3.1 无人机有效可定位区
3.1.1 无人机瞬时探测范围
设无人机飞行高度4km,接收机灵敏度-50dBm,侦察天线方位向波束宽度φ0.5E=80°,俯仰向侦察波束宽度为θ0.5E=40°,接收天线增益10 dB;雷达配置高度0m,辐射功率100000W,发射天线增益32.5dB,工作频率1.44 GHz;总损耗L=15 dB。无人机瞬时侦察区域如图2所示,阴影区域为无人机瞬时探测范围,在无人机所在位置附近,存在一小区域,无人机侦察波束不能覆盖。
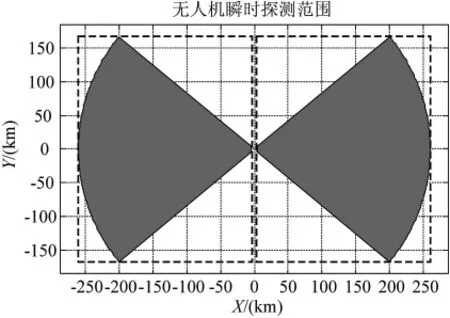
图2 无人机瞬时探测范围
3.1.2 无人机对雷达定位精度
设无人机侦察天线基线长度d=2.5 m,飞行速度v=60 m/s,航向角测量误差σα=3×10-4rad,航向角变化率测量误差σα·=2.5×105rad/s,速度测量误差σv=0.2 m/s,测向误差 σβ=3×10-4rad,测频误差σf=1.0×105Hz,相位差变化率测量误差σα·=2.5× 10-4rad/s,自身定位误差σP=10 m;目标雷达工作频率f=1.44 GHz。无人机对雷达定位精度如图3所示。
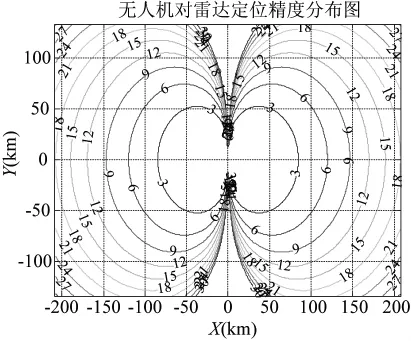
图3 无人机对雷达定位精度分布图
3.1.3 无人机有效可定位区域
由定义知,无人机有效可定位区域为阴影区域与相应定位精度等级的圆环交集。如图4所示为定位精度要求σstd=10 km时(其他参数同3.1.1和3.1.2小节)的无人机有效可定位区域。根据定义,定位精度要求不同,无人机有效可定位区域不同。
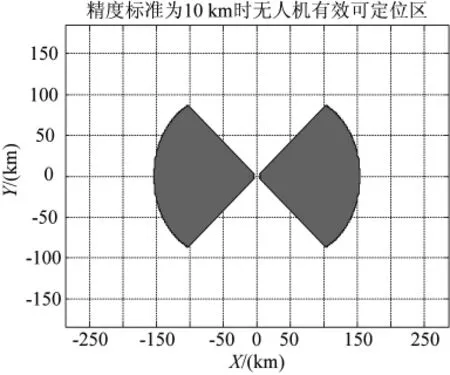
图4 无人机有效可定位区域
3.2 目标存在概率
首先将预定作战区域栅格化,并根据前期情报对预定作战区域内目标存在概率进行初始化。假设预定作战区域内被认为有8个子区域可能部署有敌方雷达,对目标存在概率和可能工作频段进行了估计,具体数值如图5所示。
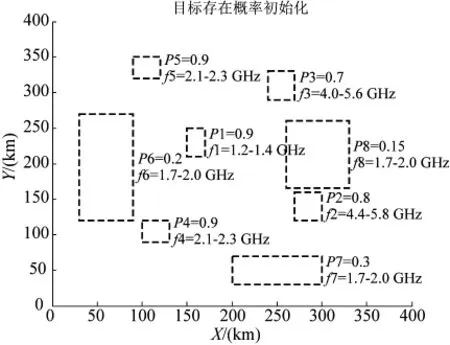
图5 目标存在概率和可能工作频段
3.3 加权侦察覆盖指数
在计算无人机对预定区域加权侦察覆盖指数之前,首先假设存在两条无人机侦察航路如图6所示,实线所示为无人机侦察航路1,虚线所示为侦察航路2,具体航程点坐标如表1所示。此外,设无人机工作频段为[0.5 GHz,2 GHz],飞行高度Huav=4 km,对典型目标有效可定位区远界和近界分别为Dmax=70 km和Dmin=3.5 km。
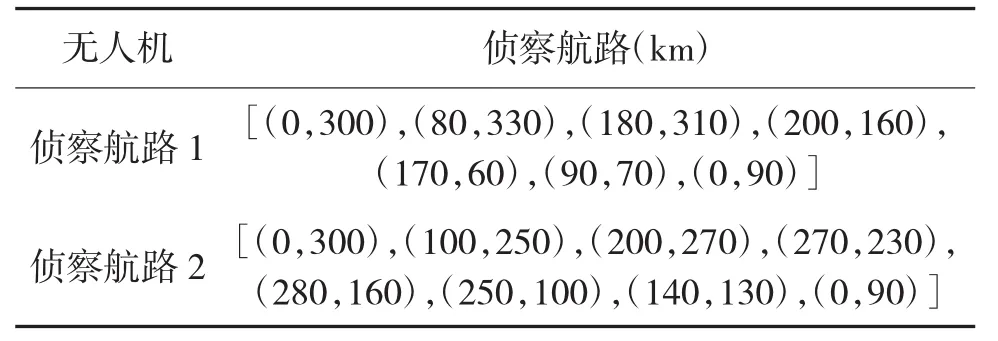
表1 无人机侦察航路航程点
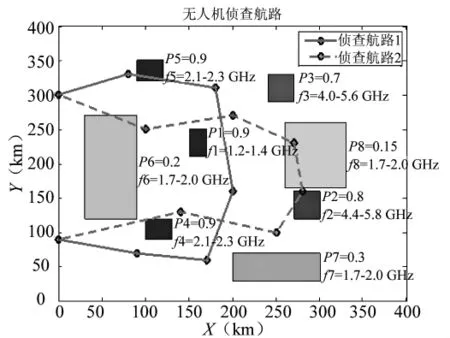
图6 无人机侦察航路
无人机分别沿侦察航路1和2对预定区域进行侦察,有效可定位区域如图7所示。
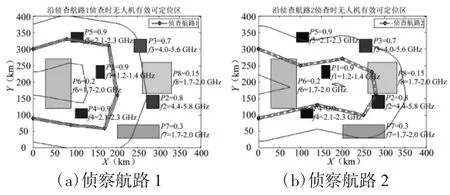
图7 沿侦察航路无人机有效可定位区域
由于无人机侦察频段范围为[0.5 GHz,2 GHz],故无人机对子区域1、2、3、4、5不具备侦察能力。由图7所示,沿侦察航路1飞行时有效可定位区域对子区域6、7、8的覆盖程度,远大于沿侦察航路2飞行时的覆盖程度。基于加权侦察覆盖指数定义,利用沿侦察航路无人机有效可定位区域信息,经MATLAB求得无人机沿侦察航路1和侦察航路2对预定区域加权侦察覆盖指数分别为:0.202 1、0.587 5。根据两条侦察航路对应的加权侦察覆盖指数,可确定侦察航路2优于侦察航路1。
4 结束语
加权侦察覆盖指数在兼顾评价无人机对重点区域侦察能力的同时,还能评价无人机全面侦察整个预定侦察区域的能力,是无人机侦察航路优劣的重要评价指标。开展基于加权侦察覆盖指数的无人机侦察航路规划将是下一步研究重点。
[1]田菁.多无人机协同侦察任务规划问题建模与优化技术研究[D].长沙:国防科技大学,2007.
[2]杨遵,雷虎民.一种多无人机协同侦察航路规划算法仿真[J].系统仿真学报,2007,19(2):433-436.
[3]柳长安,王和平,李为吉,等.无人机的协同侦察航路规划[J].火力与指挥控制,2004,29(1):60-63.
[4]邵国培,曹志耀,何俊,等.电子对抗作战效能分析[M].北京:解放军出版社,1998:63-64.
[5]潘琳.干涉仪测向与相位差变化率定位技术[D].西安:西安电子科技大学,2009:47-52.
[6]单月晖,孙仲康,皇甫堪.变化姿态角下相位差变化率无源定位方法研究 [J].电子学报,2002,30(12):1897-1900.
[7]司文健,平殿发,苏峰,等.基于相位差变化率的机载无源定位研究[J].舰船电子对抗,2010,30(4):76-79.
Reconnaissance Route Evaluation of UAV Based on Weighted-reconnaissance-covering Index
LI Zi-jie,LIU Xiang-wei
(Electronic Engineering Institute,Hefei 230037,China)
The model of effective and locatable area of UAV is established by integrating the instantaneous probing area and locating accuracy of UAV.The weighted-reconnaissance-covering degree is established by synthesizing the target existence probability of predetermined area and reconnaissance-covering degree of the grid while UAV flying along the reconnaissance route.Based on the weighted-reconnaissance-covering degree,the reconnaissance route of UAV is evaluated.
unmanned aerial vehicle,effective and locatable area,weighted-reconnaissance-covering index,reconnaissance route
V279
A
1002-0640(2015)04-0169-04
2014-01-15
2014-03-27
李子杰(1986- ),男,湖南常德人,博士研究生。研究方向:辅助决策。
