基于五电平逆变器直接转矩控制的研究
2015-06-21雷明
雷 明
(中国空空导弹研究院,河南洛阳 471009)
基于五电平逆变器直接转矩控制的研究
雷 明
(中国空空导弹研究院,河南洛阳 471009)
传统的二电平直接转矩控制采用滞环控制,可选电平数少,控制精度低,特别是对电机的转矩特性影响比较大。可通过采用多电平逆变器代替二电平逆变器,重新调整开关表来改善控制特性。另一方面,五电平产生60个有效的电压矢量,如何分配这60个电压矢量也对控制效果影响很大。本文通过分析传统二电平的应用缺陷和控制电机需要圆形磁链的需求,利用MATLAB/ SimulinK仿真验证比较了二电平和五电平对同一电机的控制效果,验证了该方法的有效性。
五电平;转矩控制;电压矢量分配;SimulinK仿真
0 引 言
近年来,多电平高压逆变器在大功率电机的控制中越来越受欢迎,五电平的逆变器作为多电平逆变器中的主力,也得到越来越广泛的应用。异步电机的直接转矩控制是电机控制中的主要控制方式之一[1],但其采用滞环控制,控制精度低,如果采用五电平逆变器,则可选电压矢量大大增多,控制精度可以提高。五电平逆变器的研究也有许多成果,但大多是SPWM方法[2-3]和SVPWM方法[4]的延伸,没有利用五电平有效矢量较多的优势和结合控制电机的实际需求:圆形磁链[5],因此如何分配电压矢量获得更接近于圆形磁链以减少转矩的波动,是一个值得研究的问题,本文将重点阐述电压矢量分配的方法。
1 五电平逆变器的拓扑结构
五电平逆变器的拓扑结构有钳位式和级联式两种[5],本文采用中点钳位式拓扑结构,其示意图如图1所示。
从图1中可以看出,每一相由8个开关管构成,五电平的产生如表1所示。当S1,S2,S7,S8开通,而S3,S4,S5,S6关闭,则A相相对于中点N输出电压为-Vdc(用-2来表示);当S2,S3, S7,S8开通,而S1,S4,S5,S6关闭,则A相相对于中点N输出电压为-Vdc/2(用-1来表示);其他情况则依次类推。

图1 钳位式五电平逆变器

表1 五电平的开关表
2 有效向量的组合
五电平逆变器一共可以组合出60个有效矢量和一个0矢量[6]。其矢量图如图2所示。将这60个矢量编号,1~10向量逆时针旋转60°得到2~20,接着逆时针旋转60°得到3~30,依次类推。

图2 五电平逆变器电压矢量图
电压矢量由A,B,C三相电压共同组成,例如矢量1,由A相为+1(+Vdc/2),B相为0,C相为0共同组成,可以简单的表示为1 0 0;矢量6由A相为+2(+Vdc),B相为0,C相为-1(-Vdc/2)组成,也可简单的表示为2 0-1;也可以由A相为+1(+ Vdc/2),B相为-1(-Vdc/2),C相为-2(-Vdc)组成,简单表示为1-1-2。在图2中,最外层(第一层)的向量只有唯一的表示方法,而次外层(第二层)的向量有两种表示方法,第三层的向量有三种表示方法,第四层有四种表示方法,0向量有5种表示方法。在实际使用中,对于多余一种方法表示的向量可任取一种进行组合使用。前10组向量的组合方式如表2所示,其他向量的组合方式和1~10向量的组合方式类似,不再一一列出。

表2 电压矢量组合方式
3 电压空间矢量对电机定子磁链和转矩的影响
异步电机的电磁转矩和定子磁链与电压空间矢量之间的关系可表示为

由式(1)可知,定子磁链由电压空间矢量积分得到,在稳态时只改变磁链的角度(方向),不改变大小。由式(2)可知,异步电机的电磁转矩可以用定子和转子磁链的矢量积来表示。由于定子磁链幅值保持不变,而转子磁链幅值由负载决定,只要通过控制定子和转子磁链之间的夹角θ(t)就可以实现对电磁转矩的控制[7]。空间电压通过改变定子磁链的角度来控制转矩,空间电压的大小决定改变磁链角度的大小,从而决定改变转矩的大小。五电平逆变器有效电压矢量的幅值有8种,可以根据不同的情况来选取电压矢量以便精细控制转矩。
4 有效电压空间矢量的分配
为了改善电机转矩控制效果,将转矩滞环控制模块进行改进,细分控制区域如表3所示。
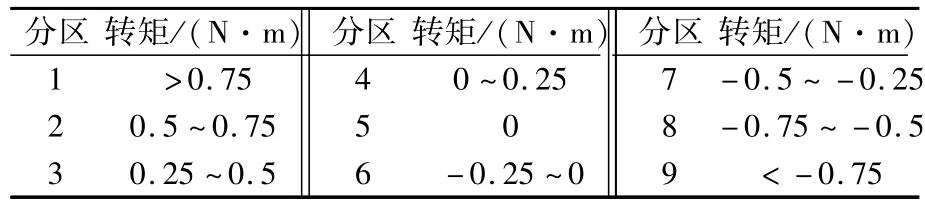
表3 转矩控制区域
将转矩控制区域分成9个区域,这样可以更精细地控制电机的转矩。对磁链由传统的6个划分区改进为24个划分区,每15°一个区域,以-7.5°~+7.5°为第一分区。以前四个分区为例,表4为电压空间矢量分配表,给出的向量和图2中的向量一一对应,其他区域的电压矢量分配以四个分区为一组,后面的一组比前一组对应的非零向量数大10,例如当磁链Phi=1且转矩T=1时,5分区的电压矢量为24,6分区的电压矢量为27,依次类推。电压空间矢量的分配原则是当转矩误差越大,需要选择的电压矢量幅值越大,而此时磁链的位置决定了电压矢量的角度,尽量保持电压矢量的角度和磁链的角度相差60°左右。

表4 部分电压空间矢量分配
5 仿真试验
为了验证此方法的有效性,在MATLAB/SimulinK仿真环境下建立仿真模型,其五电平的仿真结构如图3所示,电机参数:定子电阻Rs=1.115;转子电阻Rr=1.083;定子电感Ls=5.974 mH;转子电感Lr=5.974 mH;定转子互感Lm=203.7 mH。
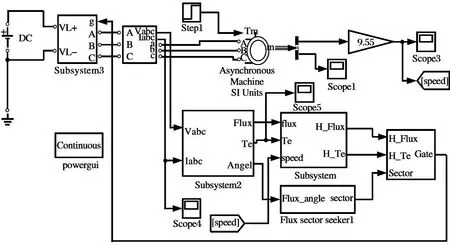
图3 五电平仿真电路图
定子磁链给定为1.5 Wb,负载转矩给定值:0~0.7 s负载为20 N·m,在0.7 s时突然增加到30 N·m。转速给定值:0~1 s为600 r/min,在1 s时转速突然增加到1 000 r/min。图4(a)~(b)分别为二电平直接转矩控制和五电平转矩控制的转矩波形图;图5(a)~(b)分别为二电平直接转矩控制和五电平转矩控制的磁链波形图。由图4可以看出,五电平逆变器控制的转矩脉动更小,控制精度更高;由图5可以看出,五电平逆变器控制的磁链更加连续和平滑。

图4 转矩波形图
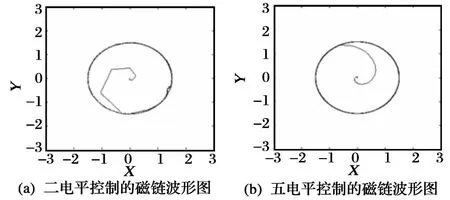
图5 磁链波形图
6 结 束 语
由于五电平逆变器具有更多的有效电压矢量,有效矢量的方向和幅值更多,在直接转矩控制中可以将磁链划分为更多的区域,而且当转矩有变化时,可以选择更适合当前需要的电压矢量来控制转矩,因此五电平逆变器的直接转矩控制使电机的转矩脉动更小,控制磁链更加连续和平滑。
五电平的这些优点,使其在更加精细或电压等级更高的电机控制中的应用更为广泛。
[1]陈伯时.电力拖动自动控制系统:运动控制系统[M].北京:机械工业出版社,2004.
[2]刘敬珺.H桥级联型多电平逆变器的研究[D].上海:上海交通大学,2011.
[3]张云,孙力,吴凤江,等.五开关五电平逆变器的载波交错SPWM控制方法[J].电工技术学报,2010,25 (2):101-106.
[4]谭维胜.基于中点箝位H桥五电平逆变器的高压变频调速系统研究[D].长沙:湖南大学,2013.
[5]刘凤君.多电平逆变技术及其应用[M].北京:机械工业出版社,2007
[6]何湘宁,陈柯莲.多电平变换器的理论和应用技术[M].北京:机械工业出版社,2006.
[7]李琰伟.异步电动机直接转矩控制的优化控制策略[D].太原:太原科技大学,2008.
Study on Direct Torque Control Based on Five-Level Inverter
LeiMing
(China Airborne Missile Academy,Luoyang 471009,China)
The two level of the conventional direct torque control is hysteresis control.Its optional level number is less,the control precision is low,especially the influence onmotor torque characteristics is large.By usingmultilevel inverter to instead of two level inverter,the switching table can be adjusted to improve the control characteristics.On the other hand,the five level has 60 effective voltage vector, and the allocation of these voltage vectors has great influence on the control effect.In this paper,through analyzing the application defects of traditional two level and the needs of circular flux,MATLAB/SimulinK simulation is used to compare the control effect of two level and five level on the same machine, which verifies the effectiveness of the proposed method.
five-level inverter;torque contuol;distribution of voltage vector;SimulinK simulation
TM464+.23
A
1673-5048(2015)03-0048-03
2015-01-04
雷明(1987-),男,河南鹤壁人,硕士研究生,研究方向是电力电子、电源。