民用飞机迎角限制器设计与分析
2015-06-15陈磊
陈磊


DOI:10.16661/j.cnki.1672-3791.2015.36.259
摘 要:该文对飞机边界控制中的迎角限制技术进行了分析,对几种工程实用的迎角限制器结构以及优缺点进行了描述,结合A320飞机以及C17飞机的迎角限制器的特点,给出了一种迎角限制器设计方案,对设计的迎角限制器的工作原理进行了描述;然后基于一种典型民用飞机进行了迎角限制器控制律设计,使用Matlab/Simulink软件建立了迎角限制器控制律仿真模型;最后对飞机迎角限制器控制律模型进行了仿真验证,结果表明设计的迎角限制器方案是可行的,可应用于工程实际。
关键词:飞控系统 边界控制 迎角限制 控制律
中图分类号:V24 文献标识码:A 文章编号:1672-3791(2015)12(c)-0259-04
目前,在飞机上可实现的主动控制技术包括放宽静稳定性、边界控制、阵风载荷减缓、机动载荷减缓等[1]。其中边界控制指的是通过在电传飞行控制系统中加入边界保护控制律,使飞机的某些重要飞机参数(包括迎角、俯仰角、空速等)能够自动地被限制在规定的边界范围内,增强了飞机大迎角和大过载时操纵稳定性,减轻了驾驶员的心理和体力负担,实现了飞行员期望的“无忧虑”操纵,大大减小因驾驶员操作处置失误引起的飞行事故,保证了飞行员与飞机的安全。
当前飞机上使用比较广泛的边界控制技术主要有迎角限制、过载限制、俯仰角限制、高速限制、滚转角限制[2]等,该文主要对迎角限制技术进行了分析,给出了一种迎角限制设计方案,然后基于一种典型飞机进行了迎角限制器控制律设计,最后对设计的迎角限制器控制律进行了仿真验证。
1 迎角限制方案
目前,工程实用的迎角限制器具有以下几种形式。
(1)“取大值”迎角限制器;
(2)A320飞机迎角限制器;
(3)C17飞机迎角限制器。
1.1 “取大值”迎角限制器
“取大值”迎角限制器的结构图见图1所示。该形式迎角限制器的工作原理为当控制增稳系统的反馈信号小于等于零时,或者当控制增稳信号大于零且大于等于迎角限制的输出信号时,系统的综合反馈信号等于控制增稳反馈信号;仅当控制增稳信号大于零并且小于迎角输出信号时,系统综合反馈信号等于迎角输出信号,此时控制增稳信号被断开,同时接通迎角限制器的输出信号,从而实现了迎角限制功能。
1.2 A320飞机迎角限制器
空客公司在设计A320飞机电传飞控系统时也采用了大迎角保护控制器[3,4],目的是保证飞机在极低速度飞行时具有正的静稳定性,从而防止动态机动或有大气紊流时失速。
A320飞机迎角限制器结构图如图2所示。
A320飞机迎角限制器根据飞机的马赫数、前缘及后缘襟翼的位置规定了保护迎角、平台迎角以及极限迎角等各种限制迎角,当实际迎角达到保护迎角时,电传操纵系统的控制律由过载指令控制改变为迎角指令控制。侧杆中立位对应保护迎角值,侧杆后拉最大位对应限制迎角值。当迎角大于平台迎角时,自动接通油门控制,使发动机处于最大推力模式,此时通过比较正常俯仰控制预置值和迎角预置值选择出信号的最大值,保留对法向过载的限制。推杆当迎角小于平台迎角2 s后,纵向电传飞控系统回路恢复到正常的控制。
1.3 C17飞机迎角限制器
波音公司的C17飞机迎角限制器结构框图见图3所示。该迎角限制器考虑了限制器断开瞬态响应的问题,防止飞机二次失速。其特点是其特点是当驾驶员从飞机大迎角状态松杆或者恢复操纵时,操纵灵敏度比增加迎角时大;通过迎角变化率和飞机加速度来分别改善飞机纵向运动短周期和长周期阻尼。
根据上述几种典型飞机迎角限制器的分析,可以看出民用飞机一般关注失速及深失速防护的功能,在俯仰指令通道引入迎角限制以保障飞机的安全飞行。综合A320飞机和C17飞机迎角控制器的特点,该文设计了一种迎角限制器,如图4所示。
由图4可知,迎角警告及限制问题通过迎角操纵无静差原则解决。即当迎角达到限制迎角时,迎角比例积分反馈接通,改善系统静稳定性;当迎角达到告警迎角时,系统告警。
驾驶员指令信号同时转换为过载增量和迎角增量信号。正常操纵时,驾驶员指令对应过载。当驾驶员指令迎角大于告警迎角与失速迎角之差时,通过逻辑判断环节比较两个通道指令信号的大小,选择出最终期望的指令信号,如果指令迎角通道接通,迎角指令限制器工作。当指令迎角等于限制迎角与失速迎角之差时,此时驾驶杆位移对应后拉最大值。同时接通杆位移和迎角反馈积分通道,保证无静差操纵。当驾驶员得知迎角告警信号做出推杆动作时,驾驶杆位移对迎角或者过载的梯度远远大于拉杆时的梯度,保证飞机快速回到安全状态。
2 迎角限制器控制律仿真模型
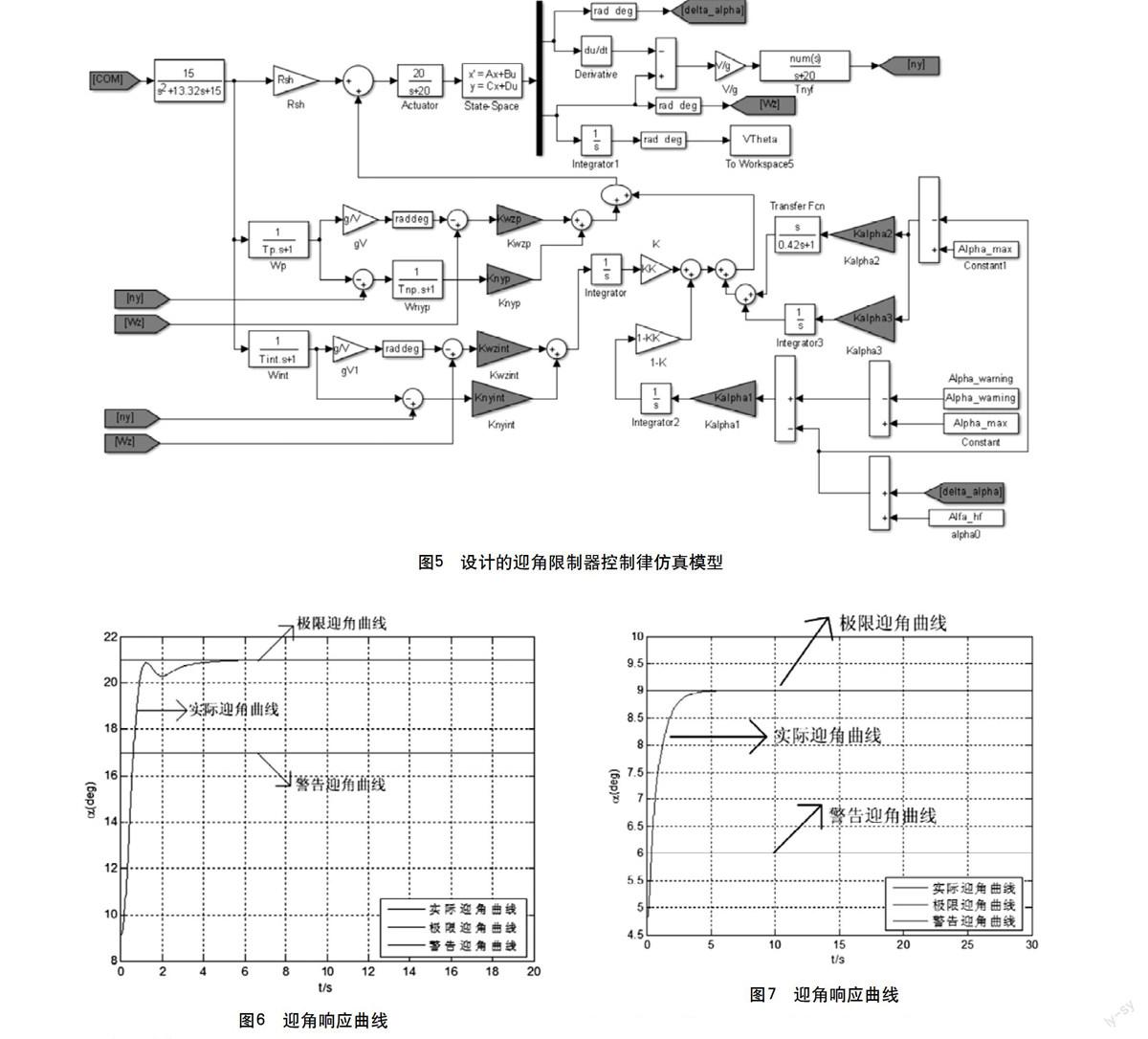
根据图4设计的迎角限制器,使用Matlab软件建立迎角限制器控制律仿真模型,见图5所示。
其中,控制增稳部分采用了构型,仿真模型中Kwzp、Knyp、Kwzint、Knyint、Kalpha1、Kalpha2、Kalpha3为在不同平衡点处需要调节的参数,采用直接搜索算法来确定。
3 仿真结果及分析
基于一种典型飞机,分别在起降、高空巡航构型状态下,对驾驶员拉满杆时飞机的迎角和过载响应进行数字仿真验证。
3.1 起飞阶段
飞机飞行状态为:高度20 m,马赫数0.26,飞机重量180 t。
迎角限制器调节参数为:Kwzp =0.9777,Knyp =-1.9443,Kwzint=3.6144,Knyint=-0.3309,Kalpha1=-6.2286,Kalpha2=-2.1529,Kalpha3=3.4810。
迎角、过载响应曲线见图6所示。
3.2 巡航阶段
飞机飞行状态为:高度11000m,马赫数0.86,飞机重量140吨。
迎角限制器调节参数为:Kwzp=1.1865,Knyp=-5.4429,Kwzint=5.3797,Knyint=0.1209,Kalpha1=-4.3722,Kalpha2 =-1.5364,Kalpha3=-4.8048 。
迎角、过载相应曲线见图7所示。
4 结语
通过以上仿真结果可以得出,飞机迎角超过警告迎角后,迎角限制器作用,飞机迎角最终不会超过限制迎角值,因此,表明设计的迎角限制器方案是可行的,可应用于工程实际。该文在进行迎角限制器设计时,迎角限制与控制增稳积分通道之间的切换采用加权的方法圆滑过渡,后续可以考虑采用最大值比较逻辑的方法,可以确保实现期望的静态操纵特性。
参考文献
[1] 吴森堂,费玉华.飞行控制系统[M].北京:北京航空航天大学出版社,2009.
[2] 刘天宇,夏洁,钱艳平.大型飞机迎角限制器设计与飞行品质评估[J].系统仿真学报,2011(23):215-218.
[3] 王华友,薛峰,李振水,等.大型飞机迎角限制方法研究[J].系统仿真学报,2009(20):257-259.
[4] 王婷,王博,李德尚.过载/迎角边界保护控制律仿真研究[J].飞行力学,2014(2):110-113.
