一种三维多UAV协同航迹规划的空间模糊文化算法
2015-06-15赵玲玲苏小红马培军张彦航哈尔滨工业大学计算机科学与技术学院150001哈尔滨
赵 明,赵玲玲,苏小红,马培军,张彦航(哈尔滨工业大学计算机科学与技术学院,150001哈尔滨)
一种三维多UAV协同航迹规划的空间模糊文化算法
赵 明,赵玲玲,苏小红,马培军,张彦航
(哈尔滨工业大学计算机科学与技术学院,150001哈尔滨)
针对多无人机在三维环境下航迹规划搜索空间大、多机协同困难等问题,提出一种基于空间模糊表示和差分进化相结合的文化算法.该方法首先用模糊集合表示三维空间网格点,提高关键路径点的被关注度;然后组合空间模糊信息、历史信息和协同信息成为文化算法的信念空间,用以剪枝规划的搜索空间;在文化算法的种群空间则利用差分进化生成满足多机协同约束的优解,并用差分获得的未知领域知识扩展信念空间,保证进化种群的多样性;最后,通过共享信息促进知识的积累和修正搜索的方向.仿真实验表明,该方法提高了关键路径点选取的效率,能够探索空间中更多的未知区域,避免求解陷入局部最优,更符合多机协同的需求,有助于快速规划出多条可行的协同航迹.
多无人机;空间模糊;文化算法;协同航迹规划;差分进化
随着无人机(unmanned aerial vehicle,UAV)技术的不断发展,UAV系统具有更高的自主能力和协同性能,能够以更低风险和更廉价的费用完成多种复杂的作战任务,并避免危险导致的人员伤亡[1].多机协同航迹规划问题是指在给定已知、部分已知或未知信息的环境中,规划从起始点到达目标点,可以绕过威胁区和障碍物且同时满足各种约束条件和协同关系的多条可行飞行航迹[2].该问题是一个NP完全问题,求解难度较大,是无人机任务规划系统研究的难点之一.
当前关于多机协同航迹规划的研究有很多,如基于概率图的规划方法将规划空间表示成简单的网络图,在网络图上搜索最短航迹,常用的概率图有随机路线图[3]、Voronoi图[4]等.启发式A∗算法也是常用的航迹规划方法,该方法用启发函数估算最优节点,并基于静态路网扩展当前位置快速搜索航迹[5-6].此外,仿效力的作用形成空间力场进行规划的人工势场法[7]也是有效进行航迹规划的方法.近年来群智能算法获得了广泛的关注,例如遗传算法利用物种遗传机制寻优,通常将备选航迹表示成进化个体,通过迭代搜索最优航迹[8-9].粒子群算法则利用粒子的记忆和相互间的学习,在空间中向着最优解方向飞行获得最佳航迹[10].此外,将差分进化应用于多机航迹规划也逐渐获得兴起,且获得了较好的效果[11].
为有效解决三维战场环境下的多机协同航迹规划问题,本文首先提出一种三维空间模糊表示方法,利用空间点的模糊信息表示其被关注程度,以优选关键路径点;接着利用文化算法对问题进行建模,将空间点的模糊信息、历史信息和协同信息组合成算法的信念空间,用以剪枝搜索的三维环境,为之后的进化操作提供领域知识;在算法的种群空间,则利用基于关键路径点的差分进化算法规划协同航迹,在求解的同时探索新的未知空间,并用未知空间的知识丰富原有信念空间,使规划的航迹是多机协同的优解组合.
1 基于空间模糊的文化算法框架
利用模糊集合表示UAV的规划空间,可以获得不同空间点的可飞性的隶属程度.基于该隶属程度进行搜索,能够凸显有价值的点,快速筛选航迹的关键路径点,有效约减空间搜索范围.因此,分析三维空间中的点与规划问题之间的模糊关系,用模糊集合表示UAV飞行的三维空间,是有效可行的空间表示方法.
文化算法[12-14]利用领域知识来指导搜索过程以提高群体演化的性能.文化算法中的“文化”通常指群体演化过程中逐渐积淀的各种知识、经验、信念、价值等行为习惯的总和.该算法同时维持两个搜索空间:种群空间表示基于进化原则的种群演化;信念空间表示演化种群中存在的文化成分.种群空间和信念空间并行进化,通过通信协议相互影响,指导种群的快速演化.
采用文化算法求解多机协同航迹规划问题,可将模糊化的三维空间网格点作为环境知识,利用空间点的隶属度筛选关键路径点,影响种群空间中个体的生成;在种群空间通过差分进化探索空间中的未知领域;同时将新个体的模糊信息和协同信息更新到信念空间,用以指导之后的演化,其框架如图1所示.
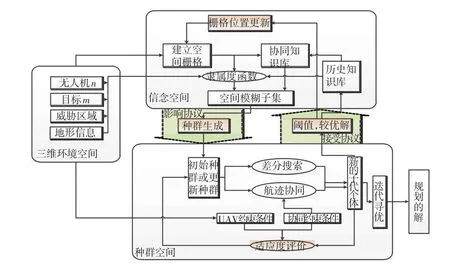
图1 空间模糊的文化算法框架
在图1中,三维环境空间是系统的输入,依据这些信息可以构建出规划的任务集.信念空间用来维护各种知识体系,用模糊集形成环境知识,在求解过程中更新种群空间产生的协同知识和历史知识.在种群空间中,差分进化搜索满足协同约束条件的新子代个体.信念空间和种群空间通过两个通信协议进行联系,影响协议综合信念空间中的知识以指导进化种群的更新;接受协议则将进化产生的优解信息、协同信息传播到信念空间,充实和完善信念知识库,为之后的进化迭代提供依据.
2 基于模糊集的信念空间构成
2.1 模糊隶属度函数
三维空间中任一点P(x,y,z)是否适合作为航迹的关键路径点,可由点P与UAV起始点和目标点之间的三角距离关系、点P与威胁区域的距离关系,以及点P与地形的距离关系体现出来.因此,对于栅格上可飞的点,可设定综合的模糊隶属度函数.
2.1.1 最短航程关系隶属度
UAV执行任务的最短航程是从出发点到目标点之间的直线距离,而空间中某点与出发点和目标点的距离之和接近最短航程时,该点适于作为关键路径点,其隶属度较大,否则较小,最短航程隶属度表示为
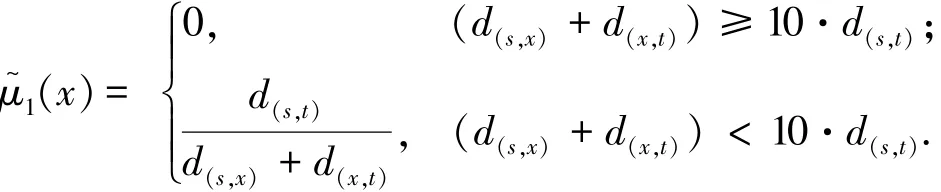
式中:x为空间中的某个点;s为UAV的出发点;t为执行任务的目标点;d为距离.同时设定x与s和t的距离之和大于最短航程距离10倍时,该点的隶属度为0.
2.1.2 多雷达威胁和禁飞区隶属度
在UAV执行任务的区域通常存在多个探测雷达和禁飞区.某点与各个雷达威胁和禁飞区关系的隶属度,可用该点到威胁中心的距离与威胁半径的关系计算.对多个威胁,可将隶属度加权平均,其隶属度函数为
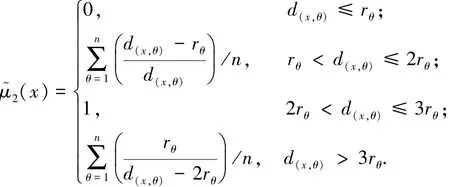
式中:θ为威胁中心;d(x,θ)为点x到该威胁中心的距离;rθ为威胁半径;n为雷达和禁飞区的个数.
2.1.3 地形隶属度
三维环境下执行任务时要求UAV不能撞到地面造成毁伤,空间中某点与地形的关系可以转换成该点在坐标x、y、z方向上离地面最近的距离与安全距离的关系,因此地形隶属度表示为
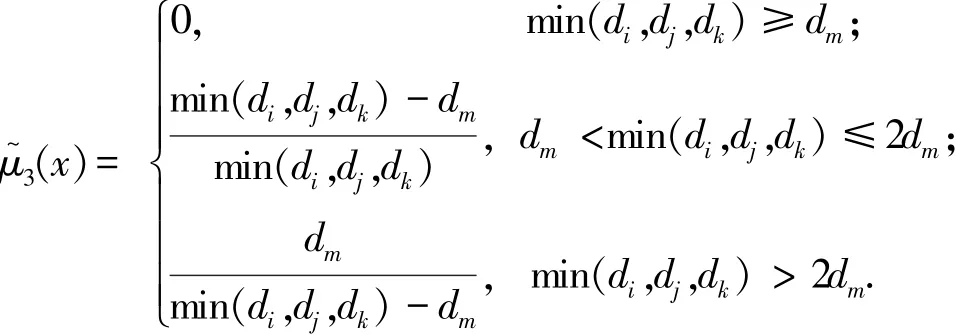
式中:di、dj、dk分别为点x在坐标系x、y、z方向上与地面之间的距离;dm为UAV到地面的安全距离.以上3种模糊隶属度的函数变化曲线如图2所示.
综合以上3种隶属关系的隶属度函数,获得实际问题求解的综合隶属度为

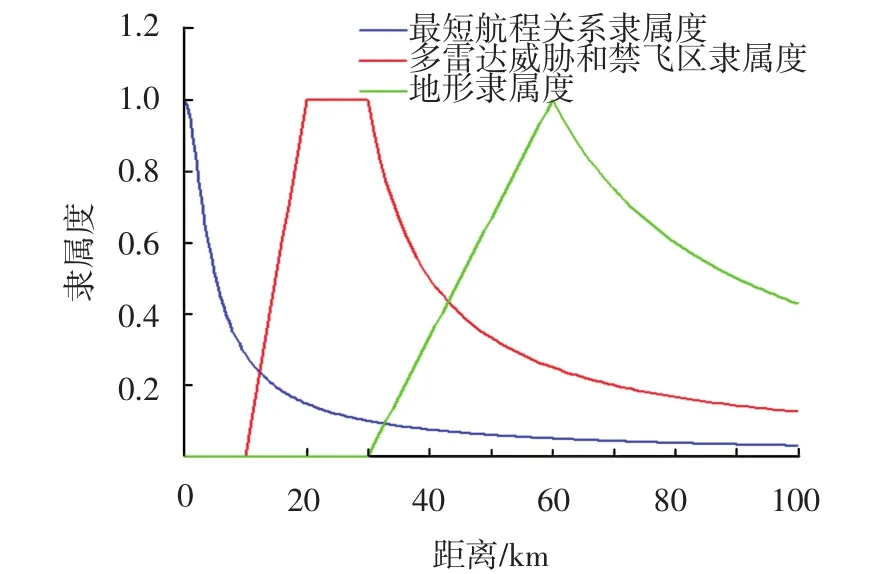
图2 模糊隶属度函数曲线
2.2 模糊信念空间的构成
信念空间可以理解为求解问题的知识仓库,存储着种群中个体的习惯模式,通常由多种知识源构成.
1)环境知识,即是求解问题的较优解集合.可以表示为一系列由关键路径点组成的飞行备选航迹:

式中:Pks为s个组成备选航迹的关键路径点;n为种群中航迹个体的数量.
2)历史知识.源于进化迭代对较优解的积累,将进化产生的部分较优解存储到信念空间构成历史知识.

式中:Pold为历代已经保留下来的个体;Presult为当前代差分操作后获得的结果种群;s%为个体保留的比例.选择个体的概率可由个体的适应度函数获得
3)协同知识.为有效提高多机作战的协同性能,可用该点执行当前任务与执行其他不同任务的隶属度差异来进行比较.
英国肉用家畜委员会下属有25%以上的猪场应用液体饲料饲喂。英国Wheyfeed有限公司每年向整个英国销售运输超过20万吨液体副产品。荷兰小麦淀粉、土豆皮、乳清粉和酵母浓缩蛋白质等高水分副产品年产量约575万吨,不宜远距离运输,主要用在猪饲料上。荷兰约60%的规模化猪场使用液体饲喂技术[2]。随着乙醇工业的发展,加拿大安大略省约有20%的生长育肥猪饲喂含玉米酒糟和浓缩浸出水溶物配制的液体饲料[3]。
3 多机协同航迹规划的文化算法
3.1 基于影响协议的种群生成
将空间栅格分解成一组在x或y轴方向上垂直于地平面的面,则从UAV出发点到目标点之间的每一个栅格面上,利用轮盘赌法筛选出一个关键路径点,基于模糊隶属度选择的概率为
式中Pi为栅格面上某点的选中概率.因此隶属度较高的点,被选中的机会较大.通过轮盘赌法在不同的栅格面上选择关键路径点,然后将这些关键点连接起来,就形成了一条初始航迹个体.
基于以上的个体生成方法,可在空间栅格上产生n条备选的航迹,组成基于环境知识的种群Penviro.同时,通过知识积累逐渐形成基于历史知识的种群Phistory.因此基于影响协议的种群生成可表示为

式中:(g/Gen)为当前代数占总代数的比例,随着进化过程不断的增长,历史知识积累可以加快算法的收敛;Pory为在种群生成时必须包含在历史知识中的当前最优解,以防止进化算法重复搜索到次优的位置.
3.2 基于接受协议的信念更新
可通过接受协议更新信念空间,根据信念空间的知识来源,其更新操作如下.
1)环境动态更新.为了尽可能全面的覆盖航迹的搜索空间,在进化过程中,可通过改变栅格的整体位置和栅格的空间结构来生成新的种群,扩大空间的覆盖范围.栅格的表示方法为
式中:U、L分别为x、y、z分量上的取值范围;n为网格的数量.为避免结构不断改变造成的大量计算,设定环境更新的阈值λ,使种群进化λ代数后再执行更新.网格更新可表示为

式中:g为当前进化的代数,当进化的代数与阈值的余数为0时,更新初始坐标位置和栅格的数量;ε、δ、γ分别为坐标更新的分量;n为一个大于2,且小于网格上限U的整数.
2)历史选择更新.历史选择更新包括随机个体保留和最优解保留两个方面,分别可表示为
式中:phistory为历史信息种群,记录不同进化代中的部分个体;pbest为当前最优解.
3)协同信息更新.当差分进化生成新个体时,要计算新个体的协同值并加入到适应度函数中,以便和种群中的父代个体进行比较.在更新协同信息时,保存已有个体的协同值,仅计算新个体的协同值即可.
3.3 种群空间的差分协同航迹规划
差分进化是基于实数编码的并行搜索算法,非常适合基于路径点坐标的航迹个体进化操作,因此,本文在文献[11,15-16]的基础上,根据三维空间中点的坐标值将差分进化的差分操作扩展如下
式中:m为航迹个体关键路径点的个数;i、j、k分别为点在三维坐标轴上的分量;F为交叉率,一般取在[0,1]范围内的值;如果新位置产生的个体具有更好的适应度,则可以通过选择操作加以保留,如

式中:g为当前种群的迭代次数,f(x)为适应度函数.
为了利用文化空间的模糊和协同信息来引导搜索,本文采用的适应度函数为

式中:fcost(x)为UAV自身的飞行代价,包括最大航程、总飞行时间、燃油指标约束等因素;μ~(x)为当前航迹上关键路径点的隶属度;σ(x)为当前航迹上关键路径点的协同值;α、β分别为比例因子,协调三者的量级.
4 结果与分析
本文将文献[16]的实验结果作为输入.在此前提下,在奔腾双核3.20 GHz、8 GB内存的PC机上,利用Matlab(R2011b)仿真软件环境进行实验,验证算法的可行性和有效性,并与标准文化算法进行了比较.
4.1 航迹规划可行性实验(实验1)
设定实验的环境参数如表1所示,UAV与目标的关系来自于目标分配的结果.同时设定实验群体空间中差分进化的参数为:种群大小(Pop=20)、进化代数(Gen=500)、交叉率(F=0.7)、比例因子(α=200)、比例因子(β=150)、历史保留率(s%=10%).实验结果如图3、4所示,其中:图3(a)为仿真实验规划的结果;图3(b)为单条航迹规划的收敛曲线.图4(a)~(c)为隐藏地形和威胁区后,在不同视角上航迹的显示结果.
从图3获得的结果可以看出,改进后的算法能够有效的生成多架UAV可行的飞行航迹.同时,算法的收敛性能较强,后期不会轻易陷入局部最优.从图4中不同视角显示的结果可以看出,规划后的航迹具有较好的协同避碰性能,航迹与航迹之间几乎没有交叉点的存在,因此改进的算法具有较好的协同能力.
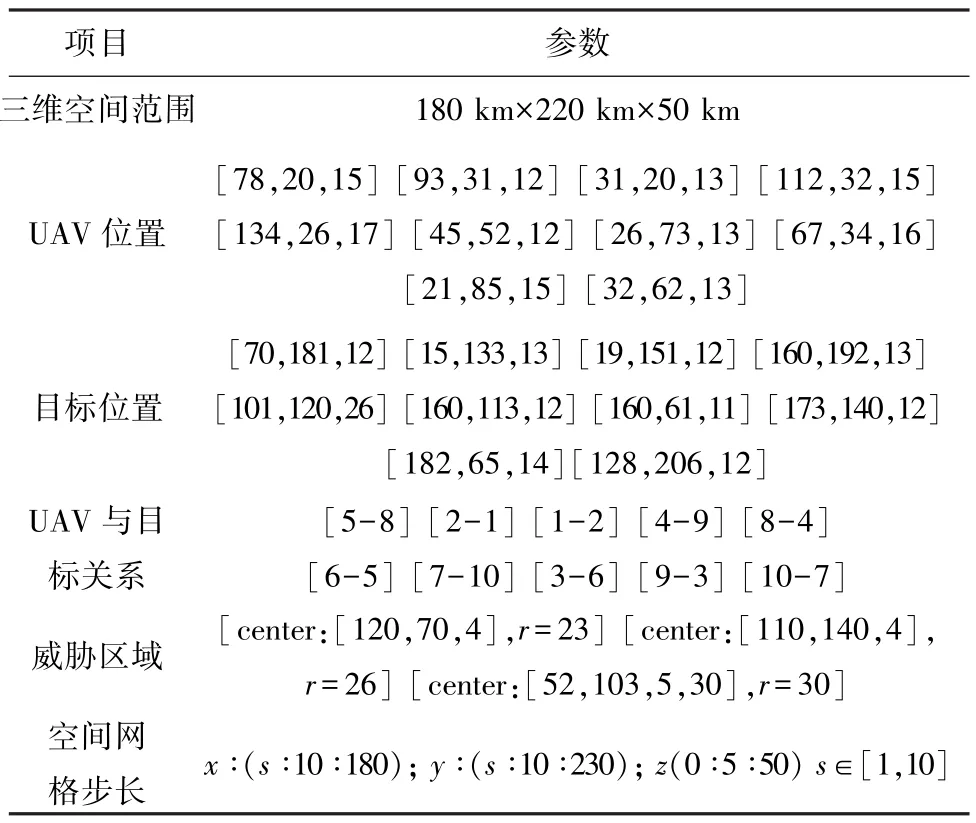
表1 实验的环境参数
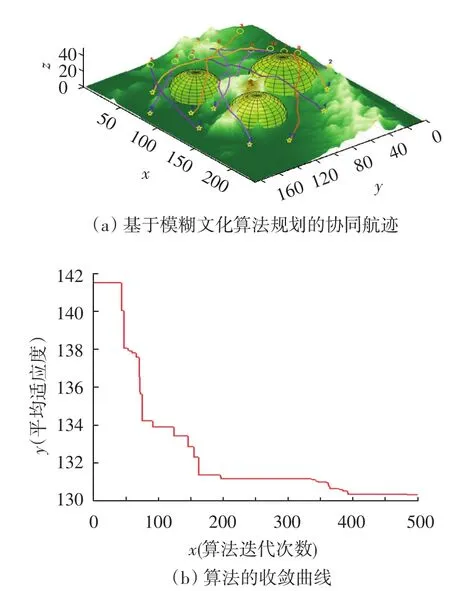
图3 协同航迹仿真实验结果和算法收敛曲线
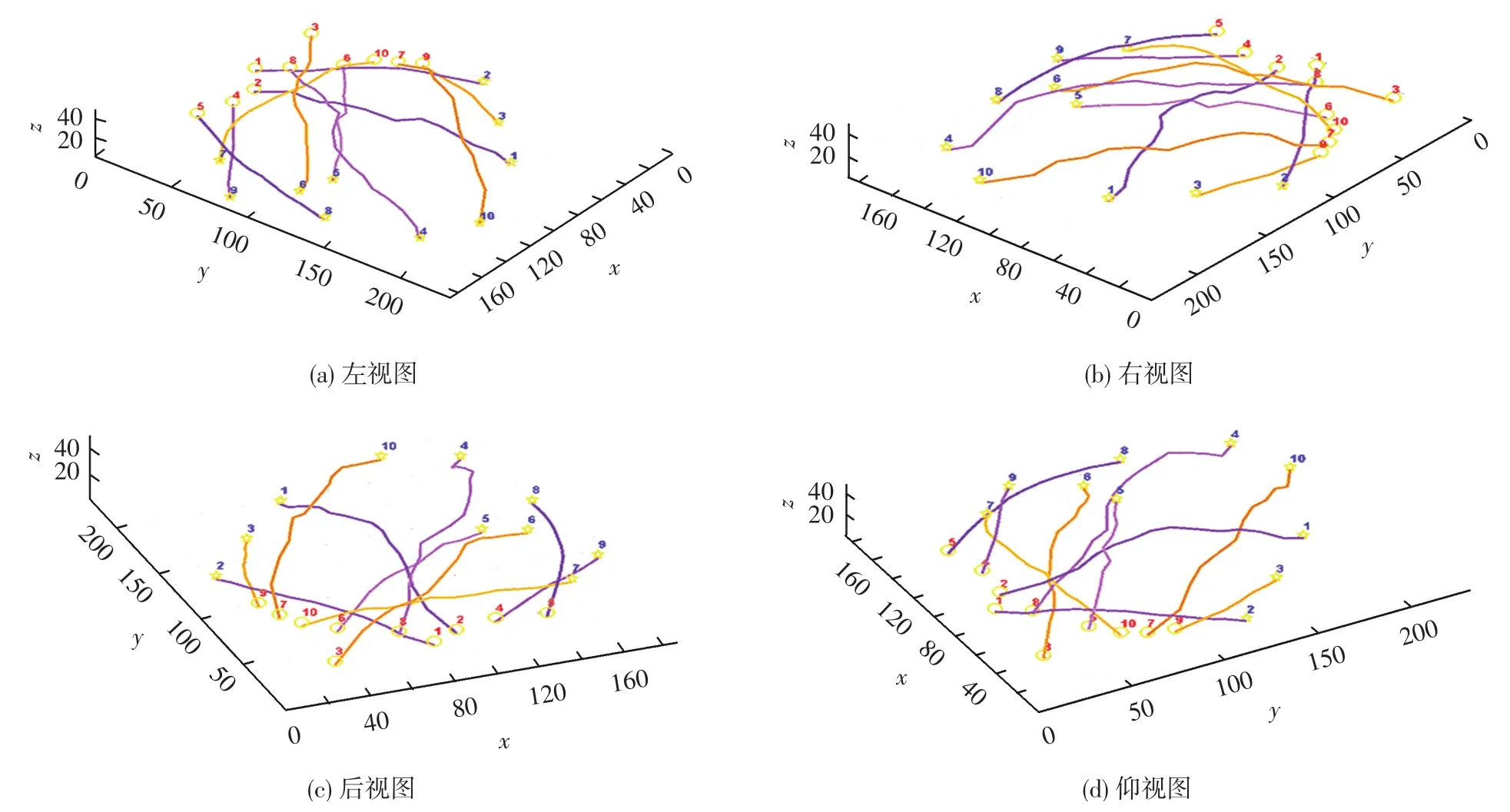
图4 不同视角的航迹协同效果
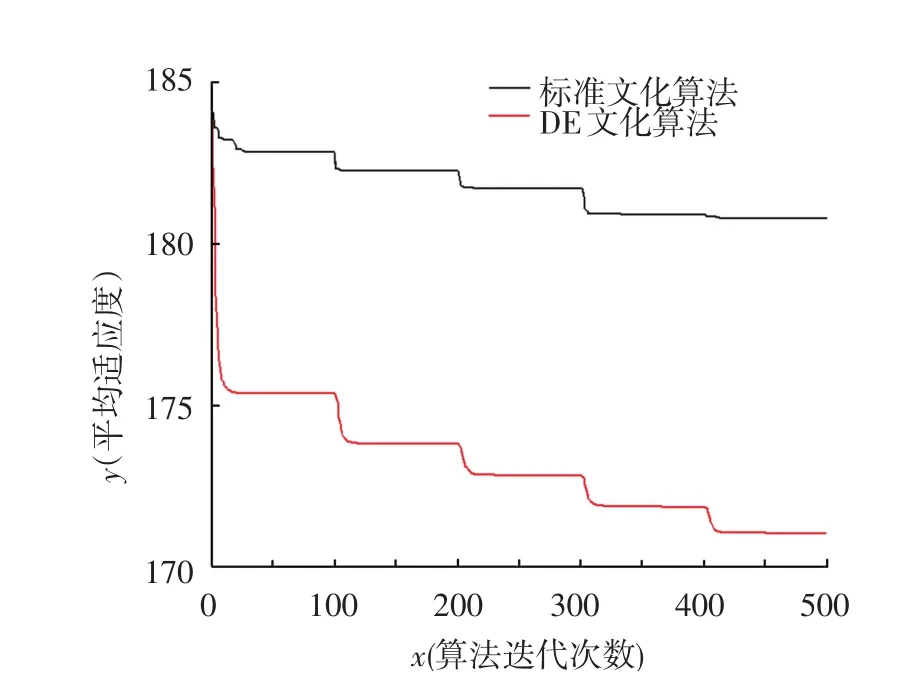
图5 DE与标准文化算法收敛曲线比较
4.2 与其他文化算法的对比分析(实验2)
标准文化算法是基于GA算法维持种群空间进化寻优的,因此本文还与标准文化算法和非模糊空间下的标准文化算法进行了对比实验,实验结果如图5和表2所示.
从图5可以看出,标准文化算法也能够有效利用信念空间中的知识指导搜索的深入,然而算法的收敛存在早熟现象,因此搜索性能较基于DE算法的文化算法差很多.从表2可以看出,非模糊空间的标准文化算法存在个别任务失效,这是由于随机搜索依赖于更好的初始化表示和更多的迭代次数.
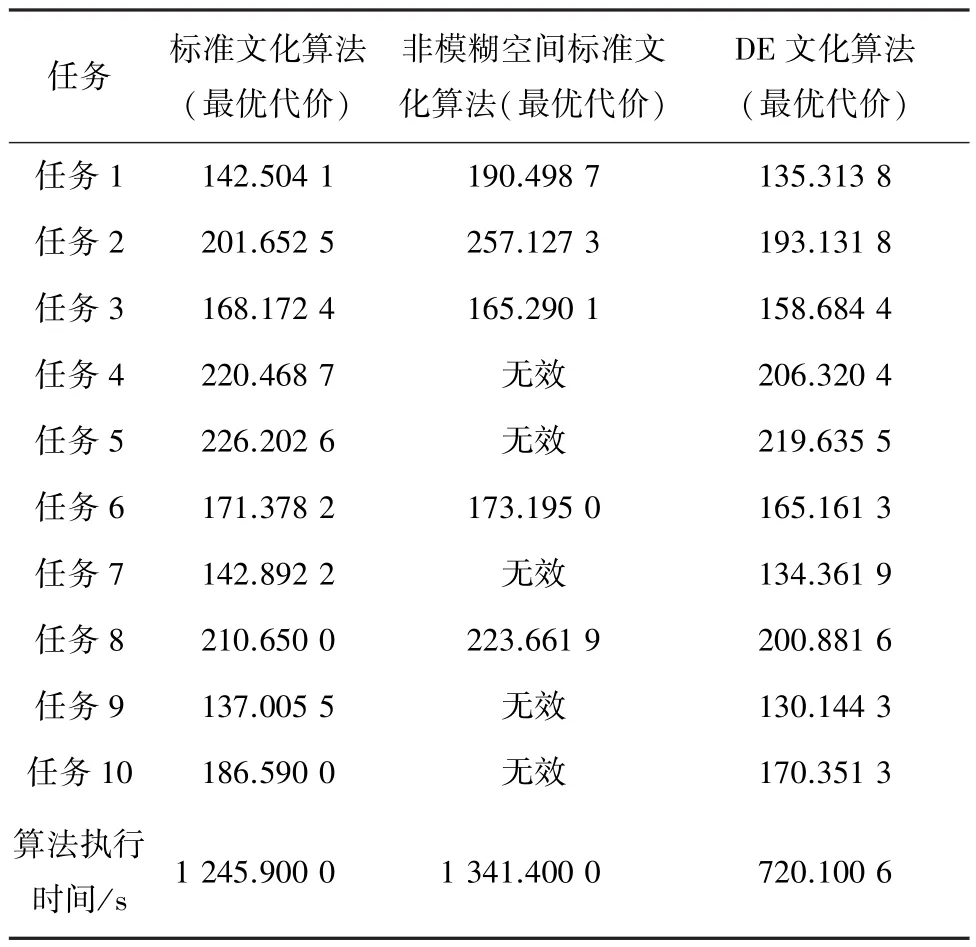
表2 规划算法的任务代价和执行时间比较
5 结 论
1)采用文化算法对航迹规划问题进行整体建模,用空间模糊信息、历史信息和协同信息共同组成算法的信念空间,剪枝航迹规划的搜索空间、保证种群多样性、并为深入搜索提供了全局信息.
2)在种群空间中改进差分进化算法,使其适用于求解航迹规划问题,并将获得的新个体按比例输入历史信息库,为之后的搜索积累更丰富的环境知识和协同知识,降低搜索的盲目性.
3)本文针对多机协同避碰问题,在适应度函数中加入协同信息量,提高了航迹个体处理协同避碰的能力.实验结果证明了本文方法的有效性.
[1]SHIN H S,LEBOUCHER C,TSOURDOS A.Resource allocation with cooperative path planning for multiple UAVs[C]//Proceedings of the 2012 UKACC International Conference on Control.Cardiff:IEEE,2012:298-303.
[2]叶媛媛,闵春平.多无人机协同航路规划的共同进化方法[J].计算机仿真,2007,24(5):37-39,149.
[3]YANG K,SUKKARIEH S.Real⁃time continuous curvature path planning of UAVs in cluttered environments[C]//Proceedings of the ISMA08 5th International Symposium on Mechatronics and Its Applications.Amman,Jordan:IEEE,2008:1-6.
[4]PEHLIVANOGLU Y V.A new vibrational genetic algorithm enhanced with a Voronoi diagram for path planning of autonomous UAV[J].Aerospace Science and Technology,2012,16(1):47-55.
[5]MENG Bobo,GAO Xiaoguang.UAV path planning based on bidirectional sparse A∗search algorithm[C]//Proceedings of 2010 International Conference on Intelligent Computation Technology and Automation.Changsha:IEEE,2010:1106-1109.
[6]MITSUTAKE K,HIGASHINO S I.An A∗⁃EC hybrid path planning method for waypoint traveling problem considering terrain[C]//Proceedings of AIAA Guidance Navigation and Control Conference and Exhibit.Honolulu,Hawaii:AIAA,2008,7133:1-14.
[7]DAILYR,BEVLY D M.Harmonic potential field path planning for high speed vehicles[C]//Proceedings of American Control Conference.Seattle,WA:IEEE,2008:4609-4614.
[8]NIKOLOS I K,VALAVANIS K P,TSOURVELOUDIS N C,et al.Evolutionary algorithm based offline/online path planner for UAV navigation[J].IEEE Transactions on Systems,Man,and Cybernetics,2003,33(6):898-912.
[9]ALLAIRE F C J,TARBOUCHI M,LABONTÉG,et al. FPGA implementation of genetic algorithm for UAV real⁃time path planning[M].Springer Netherlands:Unmanned Aircraft Systems,2009:495-510.
[10]FOO J L,KNUTZON J,KALIVARAPU V,et al.Path planning of unmanned aerial vehicles using B⁃splines and particle swarm optimization[J].Journal of Aerospace Computing,Information,and Communication,2009,6(4):271-290.
[11]RAKSHIT P,KONAR A,BHOWMIK P,et al.Realization of an Adaptive Memetic Algorithm Using Differential Evolution and Q⁃Learning:A Case Study in Multirobot Path Planning[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2013,43(4):814-831.
[12]ENGELBRECHT A P.Computational intelligence:an introduction[M].2nd ed.John Wiley&Sons,2009.
[13]REYNOLDSR G.An introduction to cultural algorithms[C]//Proceedings of the Third Annual Conference on Evolutionary programming.San Diego,CA:IEEE,1994:131-139.
[14]SUN Yang,ZHANG Lingbo,GU Xingsheng.A hybrid co⁃evolutionary cultural algorithm based on particle swarm optimization for solving global optimization problems[J]. Neurocomputing,2012,98:76-89.
[15]ONWUBOLU G,DAVENDRA D.Differential evolution for permutation⁃based combinatorial problems[M].Berlin Heidelberg:Springer,2009.
[16]赵明,苏小红,马培军,等.复杂多约束UAVs协同目标分配的一种统一建模方法[J].自动化学报,2012,38(12):2038-2048.
(编辑 张 红)
A cultural algorithm with spatial Fuzzy set to solve Multi⁃UAVs cooperative path planning in a three dimensional environment
ZHAO Ming,ZHAO Lingling,SU Xiaohong,MA Peijun,ZHANG Yanhang
(School of Computer Science and Technology,Harbin Institute of Technology,150001 Harbin,China)
The Multi⁃UAVs cooperative path planning has a complex search space in 3D environment,while the cooperative of Multi⁃UAVs is very hard to deal with.So a novel cultural algorithm based on spatial fuzzy set and differential evolution is proposed in this paper.The proposed approach uses fuzzy set to present spatial grid points in 3D,so that the key way⁃points on path should be paid more attention.Then the spatial fuzzy knowledge,history knowledge and cooperative knowledge that contained in the belief space of cultural algorithm prune the search space of Multi⁃UAVs path planning.Moreover,this approach uses differential evolution as the population space of cultural algorithm to generate the optimal solution,while it satisfies the constraints ofmulti⁃UAVs cooperative.The differential also extends the belief space with the unknown information of spatial to ensure the population diversity.In addition,the cultural algorithm exchanges the shared information,so that it accumulates the knowledge and revises the searching direction.The simulation results show that the spatial grid points based on fuzzy set enhance the efficiency of key way⁃points selected,and the culturalalgorithm could explore more unknown space out ofspatial grid such that it avoids the search fall into local optimization.Cooperative knowledge is also introduced to satisfy the requirements of Multi⁃UAVs cooperative to planning feasible paths for Multi⁃UAVs cooperative quickly.
Multi⁃UAVs;spatial fuzzy;cultural algorithm;cooperative path planning;differential evolution
TP242.6
A
0367-6234(2015)10-0029-06
10.11918/j.issn.0367⁃6234.2015.10.006
2014-06-06.
国家自然科学基金(61175027,61305023);中央高校基本科研业务费专项资金资助(HIT.NSRIF.2015069).
赵 明(1979—),男,博士研究生;苏小红(1966—),女,教授,博士生导师;马培军(1963—),男,教授,博士生导师.
苏小红,sxh@hit.edu.cn.
