柔性后缘单索传动机构的设计与分析
2015-06-15张大为石庆华王云杨姚永涛尹维龙哈尔滨工业大学复合材料与结构研究所50080哈尔滨中国航空工业集团公司北京航空制造工程研究所00004北京特种环境复合材料国家级重点实验室哈尔滨工业大学50080哈尔滨
张大为,石庆华,王云杨,姚永涛,3,尹维龙,3(.哈尔滨工业大学复合材料与结构研究所,50080哈尔滨;.中国航空工业集团公司北京航空制造工程研究所,00004北京;3.特种环境复合材料国家级重点实验室(哈尔滨工业大学),50080哈尔滨)
柔性后缘单索传动机构的设计与分析
张大为1,石庆华2,王云杨1,姚永涛1,3,尹维龙1,3
(1.哈尔滨工业大学复合材料与结构研究所,150080哈尔滨;2.中国航空工业集团公司北京航空制造工程研究所,100004北京;3.特种环境复合材料国家级重点实验室(哈尔滨工业大学),150080哈尔滨)
为满足柔性后缘结构空间的限制条件,设计一种用于驱动柔性后缘变形的单索传动机构.建立基板和单索耦合的非线性微分方程,给出了求解方法和具体算例.分析结果表明:所设计的单索传动机构可以实现后缘结构在0°和20°偏角范围内的任意变形,偏转角和驱动力之间以及偏转角和索位移之间均具有较好的线性关系;索施加在各个限位滑轮上的压力随着后缘偏转角的增加而增大,作用在限位滑轮的最大压力仅为输入力的20%左右.所研究的成果可为柔性后缘的驱动结构设计提供一定的理论依据.
变体飞行器;柔性后缘;单索传动;限位滑轮;大变形
柔性后缘机翼取消了机械铰链,使翼面在变形过程中始终保持光滑、连续和无缝,避免了刚性控制面偏转时翼面斜率的突变,从而推迟了气流分离;同时,翼面的无缝变形提高了飞行器的隐身性能[1-5].对于柔性后缘而言,其传动机构主要有硬式和软式两种.硬式传动主要是指通过刚性连杆机构将驱动力传到指定的驱动点来使驱动后缘产生弯曲变形,如变弯度机翼[6]、任务自适应机翼[7]和多关节变弯度机翼[8]等.硬式传动机构需要连杆、转动副、支座等零部件,缺点是结构复杂和附加质量大.
和硬式传动机构不同,软式传动主要是借助索和滑轮来实现驱动力的传递,具有结构简单、易于布置在空间非常有限的后缘结构内和附加质量小等优点.文献[9]提出了一种单索传动机构,并应用在于风力机叶片的变形后缘装置上,其传动索采用的是直径为2 mm的碳棒.但是,文献[9]未对单索传动机构进行力学建模及分析.文献[10]提出一种鱼骨式的自适应后缘结构,采用钢索拉动结构变形,但在结构变形的过程中索和后缘结构之间会发生干涉和摩擦等问题,从而造成索的磨损破坏.为此,本文重点研究在多设计约束下柔性后缘单索传动机构的设计和力学建模及分析方法.
1 单索传动机构设计
所设计的变体后缘单索传动机构如图1所示.其中,采用限位滑轮以保证后缘变形过程中索与蒙皮之间不发生干涉.单索传动机构驱动后缘产生弯曲变形的机理可描述为:索通过定滑轮穿过根部隔板,然后依次穿过布置在后缘结构内部的限位滑轮,最后与基板连接,通过外部驱动器拉动索来实现基板的弯曲变形.由于索只能承受拉力,所以,单索传动机构只能实现后缘结构的单向运动.若实现双向运动,需要在基板上下成对布置单索驱动机构.

图1 单索传动机构驱动的柔性后缘结构
图2 为限位滑轮的设计图,由支座和定滑轮两个主要部件组成.当后缘变形比较大时,索将与限位定滑轮接触,索的传力方向发生了改变,但力的大小没有变化,如图3(a)所示;当后缘变形比较小或者索处于被动拉伸时,索与限位滑轮不再接触,如图3(b)所示,此时索的传力方向不受影响.
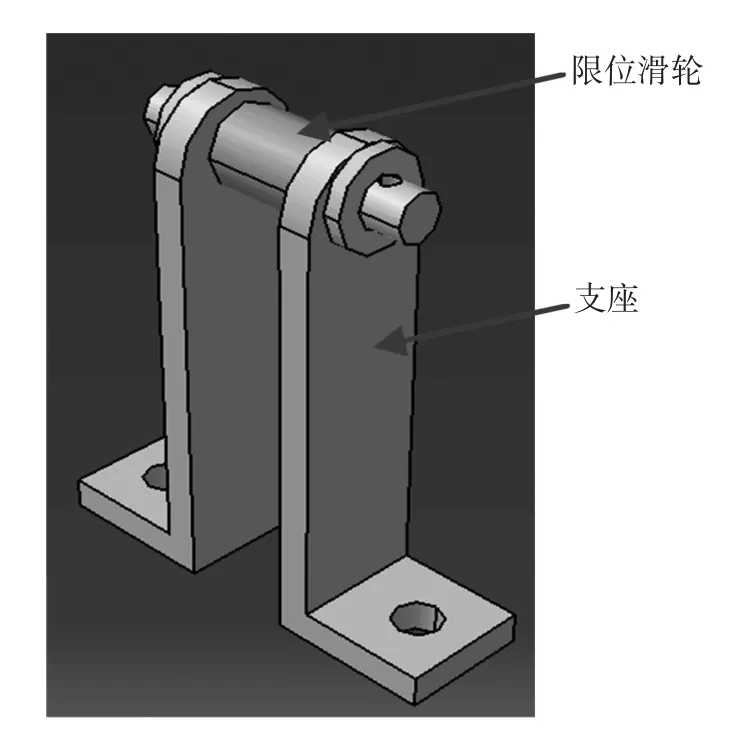
图2 限位滑轮结构
2 力学建模
基板的受力情况及参数定义如图4所示.其中:s为拖体坐标;ΔL为后缘弯曲变形过程中索的拉伸位移(简称索位移);F为索的输入力;Ni为索作用在限位滑轮上的压力;Di为索与滑轮的接触点;δi为在第i个限位滑轮处索与水平线的夹角.
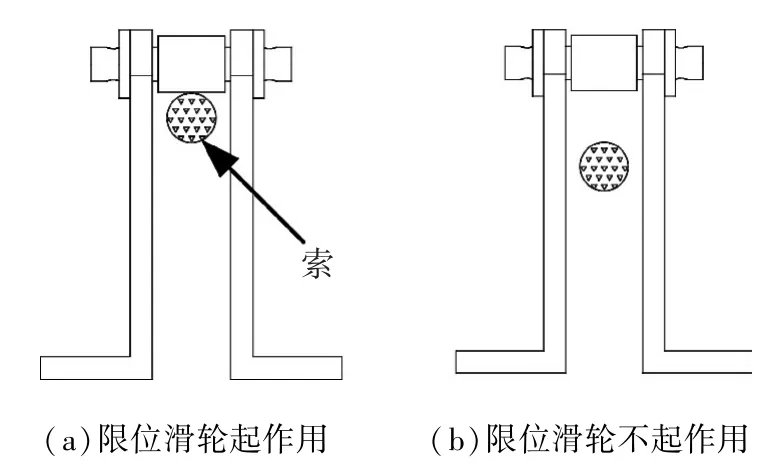
图3 限位滑轮对索的约束作用
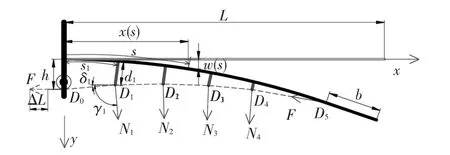
图4 基板的受力分析及参数定义
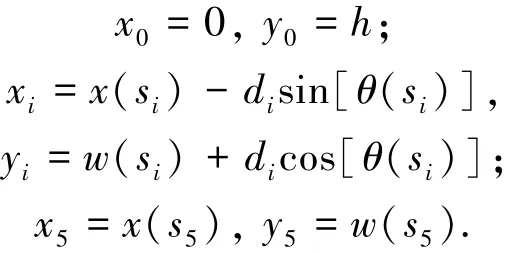
基板上s点在oxy坐标系内的坐标为[x(s),w(s)],s点的转角为θ(s).点Di(i=0,1,…,5)在oxy坐标系内的坐标为(xi,yi).由几何关系可知,各点的坐标值分别为
相邻两个限位滑轮之间的索与水平线之间夹角为
作用在限位滑轮上的力Ni与水平线之间的夹角为
根据力的平衡分析,可得

输入力F通过根部定滑轮和一系列限位滑轮的传力,最终作用在基板上驱动力的大小仍然为F.由于驱动力通过限位滑轮后,力的方向发生了变化.根据图4可以给出基板上任一点的弯矩表达式为:
式中:di为第i个限位滑轮的钢索通过点到基板中面的距离;si为第i个限位滑轮与基板连接点的拖体坐标.
在拖体坐标系下,梁曲率与弯矩之间的关系为[11]
式中θ=θ(s)为基板变形曲线在s点的切线角.
最后,得到单索传动机构和基板弯曲耦合运动的微分方程和边界条件为
上式为非线性微分方程,采用差分迭代法来求解.
3 计算与讨论
所采用算例的数据为:基板选取钢板,其长度、宽度和厚度分别为600、100、1 mm,弹性模量为210 GPa;翼型采用NACA0012,后缘的最大偏角为20°;限位滑轮为4个;b=100 mm.图5为后缘偏角分别为5°、10°、15°和20°下柔性后缘中基板、限位滑轮和索的变形状态.可以看出,随着后缘偏角的增加,索在限位滑轮位置发生偏折的角度也越大.当后缘偏角为20°时,索的最大偏折角为9.8°,发生在第1个限位滑轮处,如图5(d)所示.
图6为单索传动机构的驱动力与后缘偏角之间的关系曲线.可以看出,后缘偏角和驱动力之间具有比较好的线性关系.图7为单索传动机构的索位移与后缘偏角之间的关系曲线.后缘偏角与索位移之间也体现出比较好的线性关系.通过计算,本算例中索的传动比为1(°)/mm.因此,通过控制索的拉伸位移来控制后缘的弯曲变形.
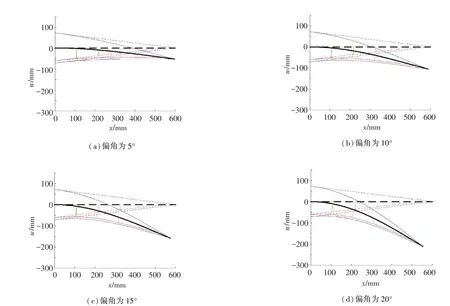
图5 柔性后缘在不同偏角下的变形状态
作用在限位滑轮上的压力载荷如表1所示,该载荷数据是限位滑轮结构设计的依据.可以看出,在整个后缘偏角从5°~20°的变化范围内索施加在根部滑轮上的压力变化幅度不大.那是因为索在根部滑轮的偏折角是随着后缘偏角的增加而减小的,所以索施加在根部滑轮上的压力变化范围很小.当后缘偏角为20°时,作用在根部滑轮上的压力为1.03 N,仅是输入力的2.3%.索施加在各个限位滑轮上的压力随着后缘偏角的增加而增大,最大压力载荷均发生第1限位滑轮上.当后缘偏角为20°时,所需的输入力为45 N,作用在限位滑轮1上的压力为7.82 N,是最大输入力的17.4%.作用在滑轮上的载荷越小,则满足强度要求的滑轮结构质量和尺寸越小.

图6 偏角与输入力之间的关系曲线
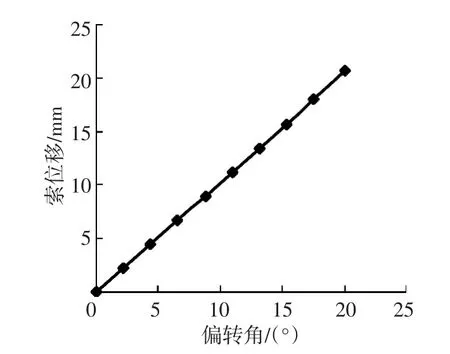
图7 偏角与索位移之间的关系曲线
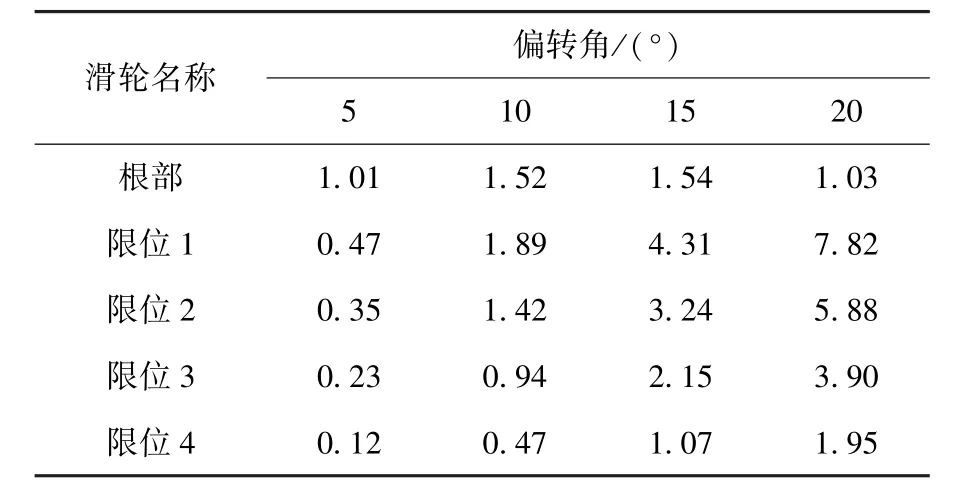
表1 索施加在滑轮的压力载荷N
4 结 论
1)设计一种用于驱动柔性后缘的单索传动机构,采用限位滑轮以保证索与蒙皮之间不发生干涉.
2)采用单索传动机构的柔性后缘,其偏转角和驱动力之间具有比较好的线性关系;同时,偏转角和索位移之间也体现出比较好的线性关系.
3)在后缘偏角0°~20°的范围内,索施加在根部滑轮上的压力载荷非常小;索施加在各个限位滑轮上的压力随着后缘偏转角的增加而增大,且作用在限位滑轮的最大压力仅为输入力的20%左右.
[1]杜善义,张博明.飞行器结构智能化研究及其发展趋势[J].宇航学报,2007,28(4):773-778.
[2]BARBARINO S,BILGEN O,AJAJ R M,et al.A review of morphing aircraft[J].Journal of Intelligent Material Systems and Structures,2011,22(9):823-877.
[3]VASISTA S,TONG L Y,WONG K C.Realization of morphing wings a multidisciplinary challenge[J].Journal of Aircraft,2012,49(1):11-28.
[4]REICH G,SANDERS B.Introduction to morphing aircraft research[J].Journal of Aircraft,2007,44(4):1059-1060.
[5]YIN W L.Stiffness requirement of flexible skin for variable trailing⁃edge camber wing[J].Science in China Technological Sciences,2010,53(4):1077-1081.
[6]PARKER H.The parker variable camber wing[R].USA:NACA,1920.
[7]JOHN W,WILTON P,GORDON A.Variable camber systems integration and operational performance of the AFTI/F-111 mission adaptive wing[R].USA:NASA,1992.
[8]POONSONG P.Design and analysis of a multi⁃section variable camber wing[D].College Park:University of Maryland,2004:10-11.
[9]DAYNES S,WEAVER P.A morphing trailing edge device for a wind turbine[J].Journal of Intelligent Material Systems and Structures,2012,23(6):691-701.
[10]WOODS B K S,FRISWELL M I.Preliminary investigation of a fishbone active camber concept[C]//Proceedings of the ASME 2012 Conference on Smart Materials,Adaptive Structures and Intelligent Systems.New York:ASME,2012:19-21.
[11]陈至达.杆、板、壳大变形理论[M].北京:科学出版社,1994:75-76.
(编辑 张 红)
Design and analysis of single cable transmission for flexible trailing edge
ZHANG Dawei1,SHI Qinghua2,WANG Yunyang1,YAO Yongtao1,3,YIN Weilong1,3
(1.Center for Composite Materials and Structures,Harbin Institute of Technology,150080 Harbin,China;2.AVIC Beijing Aeronautical Manufacturing Technology Research Institute,100004 Beijing,China;3.State Key Laboratory of Science and Technology on Advanced Composites in Special Environments(Harbin Institute of Technology),150080 Harbin,China)
To satisfy the constrain of structure space of flexible trailing edge,the single cable transmission mechanism is designed in this paper.The nonlinear differentialequations coupled by the mid⁃plate and single cable are derived,and the solving approach and the calculational example are given.The results show that the single cable can be actuated any deformation of the flexible trailing edge within the deflection angle between 0°and 20°. The linear relationship between the deflection angle and the driving force is good.So is the deflection angle and the displacement of cable.The pressure load on every limit pulley increases as the deflection angle increases.The maximum pressure load exerted on the limit pulley is about 20%of the input force.
morphing aircraft;flexible trailing edge;single cable transmission;limit pulley;large deformation
V215.3
A
0367-6234(2015)10-0025-04
10.11918/j.issn.0367⁃6234.2015.10.005
2014-04-14.
教育部博士点基金(20102302120032).
张大为(1990—),男,硕士研究生;尹维龙(1980—),男,副教授,博士生导师.
尹维龙,yinweilongbj@sina.com.
